一种基于测风激光雷达的风电机组变桨控制方法和系统与流程
本技术涉及风电机组控制,更具体地,涉及一种基于测风激光雷达的风电机组变桨控制方法和系统。
背景技术:
1、基于测风激光雷达的风电机组变桨控制是利用激光雷达技术获取实时风场数据,通过分析这些数据来调整风电机组的桨叶角度,从而实现更有效的风能捕捉和发电。这种技术结合了风场数据采集、分析和机组控制,以优化风能发电系统的性能。
2、现有技术中,风场模型的准确性较低,风场情况较为复杂,变化比较频繁,单一的控制策略不能满足风场需求。
3、因此,如何提高风场模型的准确性和控制策略的适应性,是目前有待解决的技术问题。
技术实现思路
1、本发明提供一种基于测风激光雷达的风电机组变桨控制方法,用以解决现有技术中风场模型准确性低、控制策略适应性差的技术问题。所述方法包括:
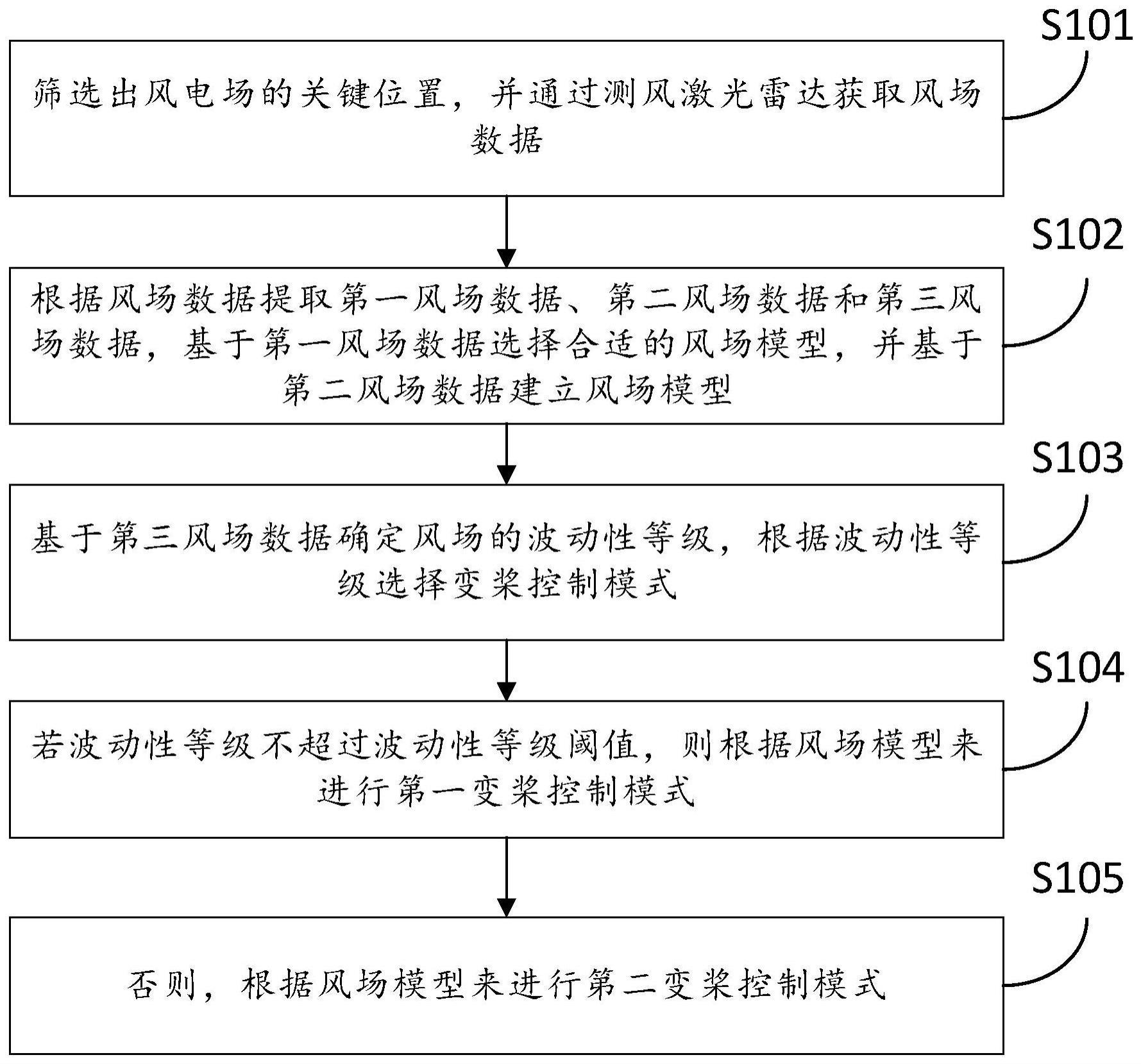
2、筛选出风电场的关键位置,并通过测风激光雷达获取风场数据;
3、根据风场数据提取第一风场数据、第二风场数据和第三风场数据,基于第一风场数据选择合适的风场模型,并基于第二风场数据建立风场模型;
4、基于第三风场数据确定风场的波动性等级,根据波动性等级选择变桨控制模式;
5、若波动性等级不超过波动性等级阈值,则根据风场模型来进行第一变桨控制模式;
6、否则,根据风场模型来进行第二变桨控制模式。
7、本技术一些实施例中,筛选出风电场的关键位置,包括:
8、将风电场划分成多个网格区域,并形成风电场网格图;
9、根据风能资源、地形信息、风向变化信息和数据可靠性在风电场网格图中确定各自对应的关键网格,分别得到第一关键网格集合、第二关键网格集合、第三关键网格集合和第四关键网格集合;
10、将第一关键网格集合、第二关键网格集合、第三关键网格集合和第四关键网格集合四者的并集作为风电场的关键位置;
11、根据第一关键网格集合、第二关键网格集合、第三关键网格集合和第四关键网格集合中关键网格的交集程度确定该关键网格的关键程度,并根据关键程度设定激光雷达的数量以及位置间隔。
12、本技术一些实施例中,基于第一风场数据选择合适的风场模型,包括:
13、第一风场数据包括地形数据、气象数据和边界条件清晰度;
14、地形数据包括线性分辨率、像素大小、栅格大小和点间距;
15、根据线性分辨率、像素大小、栅格大小和点间距与其个各自对应的阈值区间的差值确定第一分辨率、第二分辨率和第三分辨率和第四分辨率;
16、基于第一分辨率、第二分辨率和第三分辨率和第四分辨率确定地形数据的分辨率;
17、根据地形数据、地形数据的分辨率、气象数据和边界条件清晰度选择合适的风场模型。
18、本技术一些实施例中,基于第三风场数据确定风场的波动性等级,包括:
19、对第三风场数据分别进行时间序列分析、频谱分析、自相关和互相关分析、风速变化率分析、风向变化分析、涡旋结构分析、空间分布分析气象学指数分析,分别得到各自对应的风场波动性等级;
20、分别赋予时间序列分析、频谱分析、自相关和互相关分析、风速变化率分析、风向变化分析、涡旋结构分析、空间分布分析气象学指数分析对应权重,并根据各自对应的风场波动性等级确定风场的波动性等级。
21、本技术一些实施例中,若波动性等级不超过波动性等级阈值,则根据风场模型来进行第一变桨控制模式,包括:
22、根据风场模型预测未来一段时间内的风能曲线,根据风能曲线进行最大功率跟踪策略、功率限制策略和最小剪切速度策略;
23、否则,根据风场模型来进行第二变桨控制模式,包括:
24、将风能曲线进行拆分,得到多个子风能曲线,设定每个子风能曲线的目标桨叶角度;
25、根据前一个子风能曲线的实际误差修正后一个子风能曲线的目标桨叶角度。
26、对应的,本技术还提供了一种基于测风激光雷达的风电机组变桨控制系统,所述系统包括:
27、第一模块,用于筛选出风电场的关键位置,并通过测风激光雷达获取风场数据;
28、第二模块,用于根据风场数据提取第一风场数据、第二风场数据和第三风场数据,基于第一风场数据选择合适的风场模型,并基于第二风场数据建立风场模型;
29、第三模块,用于基于第三风场数据确定风场的波动性等级,根据波动性等级选择变桨控制模式;
30、第四模块,用于若波动性等级不超过波动性等级阈值,则根据风场模型来进行第一变桨控制模式;
31、第五模块,用于否则,根据风场模型来进行第二变桨控制模式。
32、本技术一些实施例中,第一模块,用于:
33、将风电场划分成多个网格区域,并形成风电场网格图;
34、根据风能资源、地形信息、风向变化信息和数据可靠性在风电场网格图中确定各自对应的关键网格,分别得到第一关键网格集合、第二关键网格集合、第三关键网格集合和第四关键网格集合;
35、将第一关键网格集合、第二关键网格集合、第三关键网格集合和第四关键网格集合四者的并集作为风电场的关键位置;
36、根据第一关键网格集合、第二关键网格集合、第三关键网格集合和第四关键网格集合中关键网格的交集程度确定该关键网格的关键程度,并根据关键程度设定激光雷达的数量以及位置间隔。
37、本技术一些实施例中,第二模块,用于:
38、第一风场数据包括地形数据、气象数据和边界条件清晰度;
39、地形数据包括线性分辨率、像素大小、栅格大小和点间距;
40、根据线性分辨率、像素大小、栅格大小和点间距与其个各自对应的阈值区间的差值确定第一分辨率、第二分辨率和第三分辨率和第四分辨率;
41、基于第一分辨率、第二分辨率和第三分辨率和第四分辨率确定地形数据的分辨率;
42、根据地形数据、地形数据的分辨率、气象数据和边界条件清晰度选择合适的风场模型。
43、本技术一些实施例中,第三模块,用于:
44、对第三风场数据分别进行时间序列分析、频谱分析、自相关和互相关分析、风速变化率分析、风向变化分析、涡旋结构分析、空间分布分析气象学指数分析,分别得到各自对应的风场波动性等级;
45、分别赋予时间序列分析、频谱分析、自相关和互相关分析、风速变化率分析、风向变化分析、涡旋结构分析、空间分布分析气象学指数分析对应权重,并根据各自对应的风场波动性等级确定风场的波动性等级。
46、本技术一些实施例中,第四模块,用于:
47、根据风场模型预测未来一段时间内的风能曲线,根据风能曲线进行最大功率跟踪策略、功率限制策略和最小剪切速度策略;
48、第五模块,用于:
49、将风能曲线进行拆分,得到多个子风能曲线,设定每个子风能曲线的目标桨叶角度;
50、根据前一个子风能曲线的实际误差修正后一个子风能曲线的目标桨叶角度。
51、通过应用以上技术方案,筛选出风电场的关键位置,并通过测风激光雷达获取风场数据;根据风场数据提取第一风场数据、第二风场数据和第三风场数据,基于第一风场数据选择合适的风场模型,并基于第二风场数据建立风场模型;基于第三风场数据确定风场的波动性等级,根据波动性等级选择变桨控制模式;若波动性等级不超过波动性等级阈值,则根据风场模型来进行第一变桨控制模式;否则,根据风场模型来进行第二变桨控制模式。提高了风场模型的精度,通过两种变桨控制模式满足了风场的适应性要求。
- 还没有人留言评论。精彩留言会获得点赞!