一种矿井巷道环境信息测量系统及方法与流程
1.本发明涉及环境测量技术领域,尤其涉及一种矿井巷道环境信息测量系统及方法。
背景技术:
2.近年来,随着我国煤炭资源的整合和大型矿井的建设,矿井的开采强度加强、开采深度增加,影响安全生产的因素越来越多,条件越来越复杂。矿井通风系统在矿井生产中的责任也越来越大,对矿井正常安全生产的作用也越来越明显。为了能满足矿井环境、生产安全以及应对矿井灾害防治的需要,必须保证矿井通风系统的稳定和可控化,为此,国家相关部门专门制定了关于矿井风量测定的相关规程。目前煤矿采掘生产正向着大型化、集约化、智能化方向发展,巷道断面变大,然而在巷道风量测定方面,其方法和手段都相对落后,主要通过人工手持机械风表进行风量测量,该过程易受外界因素与人为因素的影响较为明显,由于人员自身条件限制,风量测定范围主要为巷道中下部,测试风量与实际风量相差较大,数据记录及处理方式、手段原始,致使测风点积累的大量数据不易保存和数据分析,进而导致矿井巷道内风量综合评判能力较差,存在测风工作人员劳动强度大、测风精度不高等问题,这些充分说明了传统测风装备和技术手段已不满足如今大型矿井安全生产的需要,大断面巷道风量的测定方法和手段向着智能化、集约化、高效化方向发展已成必然。
技术实现要素:
3.针对上述现有技术的不足,本发明提供一种矿井巷道环境信息测量系统及方法。
4.为解决上述技术问题,本发明所采取的技术方案是:一种矿井巷道环境信息测量系统,系统包括:
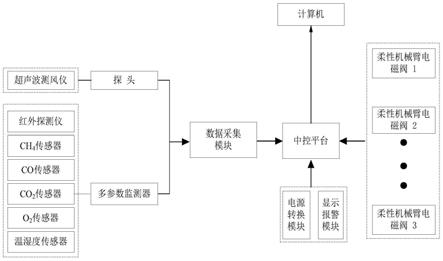
5.超声波风速仪、多参数监测器、数据采集模块、中控平台、数据通讯模块、柔性机械臂、电源转换模块、显示及报警模块和计算机;
6.所述超声波风速仪安装在柔性机械臂的自由端上,所述柔性机械臂的另一端固定在井下测风段硐室的固定桩上;
7.所述数据通讯模块包括有线传输方式和无线传输方式;所述超声波风速仪和多参数监测器通过有线传输方式与数据采集模块相连接;所述中控平台与柔性机械臂、数据采集模块、显示及报警模块通过有线传输方式相连接;所述中控平台与计算机通过有线传输方式或无线传输方式相连接;
8.所述电源转换模块分别给超声波风速仪、多参数监测器、中控平台、柔性机械臂和显示及报警模块供电。
9.进一步的,所述多参数监测器包括:红外探测器、ch4气体传感器、co气体传感器、o2气体传感器、co2气体传感器和温湿度传感器。
10.进一步的,所述ch4气体传感器、co气体传感器、o2气体传感器、co2气体传感器和温湿度传感器安装在防爆外壳内,所述红外探测器安装在防爆外壳上并将防爆外壳悬挂固定
在进风端巷道的顶板上。
11.进一步的,所述中控平台、数据采集模块、电源转换模块和显示及报警模块安装在防爆外壳内,并将防爆外壳固定在巷道底部,距离柔性机械臂大于50m的位置。
12.进一步的,所述柔性机械臂包括多级机械臂、多个电磁阀、耐压胶管和微型气动缸体;所述多级机械臂为中空结构,每级机械臂的端头均设计为圆形,在圆形的截面上固定有三个微型气动缸体;所述微型气动缸体的一端与机械臂中空结构中的耐压胶管相连接;所述多个电磁阀安装在所述井下测风段硐室的固定桩内,通过控制耐压胶管中的气压来控制微型气动缸体,实现对机械臂的控制。
13.进一步的,所述所述多级机械臂中各级机械臂之间通过球形铰活动连接。
14.进一步的,所述多级机械臂的横截面均为扁平流线形,减少对巷道断面风量真实性的干扰。
15.另一方面,本发明还提供一种采用上述矿井巷道环境信息测量系统进行矿井巷道环境信息测量的方法,包括如下步骤:
16.步骤1:采用矿井巷道环境信息测量系统中的多参数监测器进行环境参数的测试和校调,以满足矿井巷道24h实时监测巷道内环境气体参数要求,具体过程如下:
17.步骤1.1:采用多参数监测器进行环境参数的测试,包括巷道内风流中的co、ch4、o2、co2以及风流的温湿度的参数;
18.步骤1.2:判断环境参数是否超出矿井巷道内阈值,若超出阈值则通知显示及报警模块进行报警,同时对环境参数进行校调;
19.步骤1.3:连续实时监测24h不再发生报警,则满足巷道内环境气体参数要求。
20.步骤2:规划,根据超声波风速仪测风的路线对中控平台进行设定,实现对柔性机械臂中连接各级机械臂的电磁阀工作时间以及阀门开口大小的控制,具体过程如下:
21.步骤2.1:建立以巷道迎风端左下角为原点,宽度方向为x轴,高度方向为y轴的直角坐标系;并依据巷道的宽、高的尺寸,把巷道在宽度方向和高度方向上进行等距网格划分为偶数段,分别记为i、j;
22.步骤2.2:在网格划分的基础上,确定超声波风速仪测风的路线;并根据超声波风速仪测风的路线,确定超声波风速仪移动的分段函数方程;
23.步骤2.3:根据超声波风速仪移动的分段函数方程对中控平台进行设定,包括柔性机械臂中连接各级机械臂的电磁阀的工作时间以及阀门开口的大小,实现对柔性机械臂的控制。
24.步骤3:通过红外探测器对巷道进行扫描,当扫描到人员或者货物通过时,通知显示及报警模块进行语音提醒和报警;
25.步骤4:启动步骤2对中控平台的设定,由中控平台控制柔性机械臂中连接各级机械臂的电磁阀,使超声波风速仪按照预规划的测风路线进行巷道风量测定,获得未修正的断面风量大小;
26.步骤5:对风量大小进行校准,再把校准后的风量数据进行存储;
27.步骤6:对校准后的风量数据进行判断,如果风量数据在可靠阈值内,则结束测风流程,执行步骤7;否则转至执行步骤4,重新进行测风;
28.步骤7:将在可靠阈值内的风量数据按照通讯协议通过电缆或者5g网络无线传输
至地面的计算机。
29.采用上述技术方案所产生的有益效果在于:
30.1、本发明采用柔性机械臂进行断面测风,可以实现大断面的测风的要求,同时也可以实现远程测风流程,符合现代化大型矿井智能化发展的趋势。
31.2、本发明的多参数监测器,可以实现24h实时监测,同时满足当井下发生灾害时,及时掌握井下巷道环境参数情况,为井上决策人员提供数据支撑。
32.3、本发明柔性机械臂设计外形为扁平形,在进行断面风量测量的过程中,减小对断面风量真实性的干扰。
33.4、本发明柔性机械臂采用进行的压风管路的风压作为机械臂工作的动力,安全可靠。
34.5、本发明提供的系统和方法实现了煤矿井下环境参数的测定,节省大量人力物力。在矿井正常生产时,该装置系统不需要人为干涉,基于5g无线数据传输技术和电磁阀自动控制,自动巡检测定巷道断面内的风量数据,该系统还可以在井下发生灾害时,远程实现井下风流情况的测定,灾害区域气体信息采集,以及可视化的巷道情况等功能,为井下发生灾变时的救援工作提供数据支撑,提高矿井的应灾救灾的能力,保证应急救援人员的安全。
附图说明
35.图1为本发明实施例中矿井巷道环境信息测量系统结构示意图;
36.图2为本发明实施例中矿井巷道环境信息测量系统在矿井巷道内的安装位置示意图;
37.图3为本发明实施例中矿井巷道环境信息测量系统在矿井巷道内的安装位置俯视图;
38.图4为本发明实施例中柔性机械臂的结构示意图;
39.图5为本发明实施例中柔性机械臂各级机械臂之间连接处的结构示意图;
40.图6为本发明实施例中机械臂的横截面轮廓线;
41.图7为本发明实施例中矿井巷道环境信息测量的方法的流程图;
42.图8为本发明实施例中超声波风速仪纵向测风路线规划图;
43.图9为本发明实施例中超声波风速仪横向测风路线规划图;
44.其中,1-测风巷道;2-电缆;3-测风段硐室;4-固定桩;5-测风截面;6-计算机;7-通讯线路;8-中控平台;9-多参数监测器;10-巷道进风端;11-柔性机械臂;12-超声波风速仪;13-球形铰;14-耐压胶管;15
‑‑
微型气动缸体;16-多级机械臂。
具体实施方式
45.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
46.如图1所示,本实施例矿井巷道环境信息测量系统如下所述。
47.系统包括超声波风速仪12、多参数监测器9、数据采集模块、中控平台8、数据通讯模块、柔性机械臂11、电源转换模块、显示及报警模块和计算机6;
48.本实施例中,超声波风速仪12选用yfc15型。
49.所述超声波风速仪12安装在柔性机械臂11的自由端上,所述柔性机械臂的另一端固定在井下测风段硐室3的固定桩4上,如图4所示;
50.所述数据通讯模块包括有线传输方式和无线传输方式;所述超声波风速仪12和多参数监测器9通过有线传输方式与数据采集模块相连接;所述中控平台8与柔性机械臂11、数据采集模块、显示及报警模块通过有线传输方式相连接;所述中控平台8与计算机6通过有线传输方式或无线传输方式相连接;
51.所述电源转换模块分别给超声波风速仪12、多参数监测器9、中控平台8、柔性机械臂11和显示及报警模块供电。
52.进一步的,所述多参数监测器9包括:红外探测器、ch4气体传感器、co气体传感器、o2气体传感器、co2气体传感器和温湿度传感器。
53.进一步的,所述ch4气体传感器、co气体传感器、o2气体传感器、co2气体传感器和温湿度传感器安装在防爆外壳内,所述红外探测器安装在防爆外壳上并将防爆外壳悬挂固定在进风端巷道的顶板上。
54.进一步的,所述中控平台8、数据采集模块、电源转换模块和显示及报警模块安装在防爆外壳内,并将防爆外壳固定在巷道底部,距离柔性机械臂11有大于50m的位置。
55.本实施例中,矿井巷道环境信息测量系统在矿井巷道内的安装位置如图2所示,其俯视图如图3所示。
56.进一步的,所述柔性机械臂11包括多级机械臂16、多个电磁阀、耐压胶管14和微型气动缸体15;所述多级机械臂16为中空结构,每级机械臂的端头均设计为圆形,在圆形的截面上固定有三个微型气动缸体15;所述微型气动缸体15的一端与多级机械臂16中空结构中的耐压胶管14相连接;所述多个电磁阀安装在所述井下测风段硐室3的固定桩4内,通过控制耐压胶管14中的气压来控制微型气动缸体15,实现对柔性机械臂11的控制。
57.进一步的,所述所述多级机械臂16中各级机械臂之间通过球形铰13活动连接。
58.本实施例中,所述柔性机械臂11为4级机械臂,如图4所示,4级机械臂的一级固定在测风段硐室3的固定桩4上,2级机械臂与1级机械臂通过球形铰13活动连接,连接结构如图5所示。固定桩4内的电磁阀控制1级机械臂内的耐压胶管14的气压来控制与之连接的3个微型气动缸体15,实现对2级机械臂的运动控制;同理实现对3、4级机械臂的运动控制,从而实现对整个柔性机械臂的控制。
59.进一步的,所述多级机械臂16的横截面均为扁平流线形,如图6所示,减少对巷道断面风量真实性的干扰。
60.另一方面,本发明还提供一种采用上述矿井巷道环境信息测量系统进行矿井巷道环境信息测量的方法,其流程如图7所示,包括如下步骤:
61.步骤1:采用矿井巷道环境信息测量系统中的多参数监测器进行环境参数的测试和校调,以满足矿井巷道24h实时监测巷道内环境气体参数要求,具体过程如下:
62.步骤1.1:采用多参数监测器进行环境参数的测试,包括巷道内风流中的co、ch4、o2、co2以及风流的温湿度的参数;
63.步骤1.2:判断环境参数是否超出矿井巷道内阈值,若超出阈值则通知显示及报警模块进行报警,同时对环境参数进行校调;
64.步骤1.3:连续实时监测24h不再发生报警,则满足巷道内环境气体参数要求。
65.步骤2:规划,根据超声波风速仪测风的路线对中控平台进行设定,实现对柔性机械臂中连接各级机械臂的电磁阀工作时间以及阀门开口大小的控制,具体过程如下:
66.步骤2.1:建立以巷道迎风端左下角为原点,宽度方向为x轴,高度方向为y轴的直角坐标系;并依据巷道的宽、高的尺寸,把巷道在宽度方向和高度方向上进行等距网格划分为偶数段,分别记为i、j;
67.步骤2.2:在网格划分的基础上,确定超声波风速仪测风的路线;并根据超声波风速仪测风的路线,确定超声波风速仪移动的分段函数方程;超声波风速仪测风路线上其中一段函数的方程记为:y=kx,其中k为超声波风速仪移动斜率。
68.本实施例中,对巷道进行网格划分,并在网格划分的基础上,确定超声波风速仪测风的路线如图8和图9所示。
69.步骤2.3:根据超声波风速仪移动的分段函数方程对中控平台进行设定,包括柔性机械臂中连接各级机械臂的电磁阀的工作时间以及阀门开口的大小,实现对柔性机械臂的控制。
70.步骤3:通过红外探测器对巷道进行扫描,当扫描到人员或者货物通过时,通知显示及报警模块进行语音提醒和报警;
71.步骤4:启动步骤2对中控平台的设定,由中控平台控制柔性机械臂中连接各级机械臂的电磁阀,使超声波风速仪按照预规划的测风路线进行巷道风量测定,获得未修正的断面风量大小;
72.本实施例中,风量测定的路线如图8和图9所示,按图中的箭头方向分别在巷道内进行纵向测风和横向测风。
73.步骤5:对风量大小进行校准,再把校准后的风量数据进行存储;
74.步骤6:对校准后的风量数据进行判断,如果风量数据在可靠阈值内,则结束测风流程,执行步骤7;否则转至执行步骤4,重新进行测风;
75.步骤7:将在可靠阈值内的风量数据按照通讯协议通过电缆或者5g网络无线传输至地面的计算机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1