一种警用无人巡逻船及其图像采集机构的制作方法
1.本发明涉及警用无人巡逻船领域,尤其涉及一种警用无人巡逻船及其图像采集机构。
背景技术:
2.海域面积广阔,巡警的效率较为低下,因此有的地方会使用警用无人巡逻船进行巡警,但是现有的无人巡逻船在使用时,其中的摄像头都是固定在船体上的,当遇上有风浪的区域时,摄像头的拍摄面将出现抖动的情况,同时摄像头只能对水面上的情况进行巡视,无法对水底的情况进行巡警。
3.因此,有必要提供一种新的警用无人巡逻船及其图像采集机构解决上述技术问题。
技术实现要素:
4.为解决上述技术问题,本发明提供一种可防止摄像头剧烈抖动,并且对水下进行监测的警用无人巡逻船及其图像采集机构。
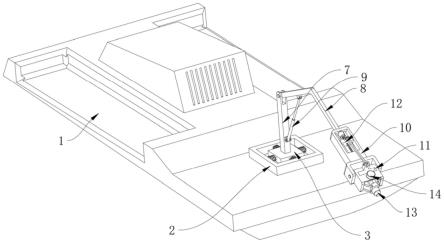
5.本发明提供的警用无人巡逻船包括巡逻船本体、基座、安装块、定位块、定位导槽、弹簧、立柱、连接杆、电动伸缩杆、连接框、安装架、调节装置、摄像头和转向装置,巡逻船本体的船头顶部固定安装有基座,基座的中部安装有安装块,基座的内壁对称固定安装有定位块,安装块的外侧对称开设有定位导槽,定位块与定位导槽滑动连接,定位块的宽度小于与定位导槽的宽度设置,定位块的外侧套设有弹簧,弹簧的一端与基座的内壁固定连接,弹簧的另一端与安装块的表面贴合设置,立柱固定安装在安装块的顶部,立柱的顶部通过轴销转动安装有连接杆,立柱的一侧底部通过轴销转动安装有电动伸缩杆,电动伸缩杆的移动端通过轴销与连接杆转动连接,连接框固定安装在连接杆远离立柱的一端,连接框远离连接杆的一端内部通过轴销转动安装有安装架,连接框的内部固定安装有用于对安装架进行过转动的调节装置,调节装置包括限位杆、移动块、限位孔、第一电机、螺杆和传动杆,限位杆对称固定安装在连接框的内部,两个限位杆之间滑动安装有移动块,移动块对应限位杆的位置开设有限位孔,限位孔与限位杆滑动连接,第一电机固定安装在连接框的内部一端,第一电机的输出端固定安装有螺杆,螺杆远离第一电机的一端与连接框的内壁通过轴承转动连接,螺杆与移动块的中部螺纹连接,传动杆通过轴销转动安装在移动块的顶部,传动杆远离移动块的一端通过轴销与安装架的一端顶部转动连接,摄像头安装在安装架的中部,安装架的中部安装用于对摄像头进行转动的转向装置。
6.优选的,定位块与定位导槽均呈方形设置,定位块与定位导槽紧密贴合滑动。
7.优选的,第一电机为一种减速伺服电机。
8.优选的,限位孔与限位杆紧密贴合滑动。
9.优选的,转向装置包括安装板、第二电机、固定杆、弧形导杆、转动块和弧形导槽,安装板固定安装在安装架的中部,安装板的顶部固定安装有第二电机,第二电机的输出端
固定安装有固定杆,弧形导杆对称固定安装在安装架的内部,两个弧形导杆之间滑动安装有转动块,转动块对应弧形导杆的位置开设有弧形导槽,弧形导槽与弧形导杆滑动连接,固定杆远离第二电机的一端与转动块的内壁固定连接,转动块的一侧与摄像头固定连接。
10.优选的,弧形导槽与弧形导杆紧密贴合滑动。
11.优选的,第二电机的输出端、弧形导杆的中轴和转动块的转动中心同轴设置。
12.本方案还包括一种警用无人巡逻船的图像采集机构,包括上述任一的警用无人巡逻船。
13.与相关技术相比较,本发明提供的警用无人巡逻船及其图像采集机构具有如下有益效果:
14.本发明提供一种警用无人巡逻船及其图像采集机构,与现有技术相比,当巡逻船本体遇上有风浪的区域时,巡逻船本体将出现抖动,将带动安装块在基座的中部在四个方向摆动,在安装块移动时,定位块的定位导槽将顺着定位块全方位的移动,同时通过四个弹簧对安装块的挤压,将带动定位块在基座的中部的振幅减小,提高摄像头的拍摄效果;
15.通过电动伸缩杆的拉动将带动连接杆在立柱的顶部转动,进而将带动摄像头移动至水底,实现对水底的监测,提高了巡逻船本体监测的范围,与此同时,通过调节装置的运作实现摄像头拍摄角度的变化,通过转向装置的运作实现摄像头转动角度的调节,扩大摄像头的拍摄范围。
附图说明
16.图1为本发明提供的警用无人巡逻船及其图像采集机构的整体结构示意图;
17.图2为图1所示的爆炸结构示意图;
18.图3为图1所示的局部结构示意图。
19.图中标号:1、巡逻船本体;2、基座;3、安装块;4、定位块;5、定位导槽;6、弹簧;7、立柱;8、连接杆;9、电动伸缩杆;10、连接框;11、安装架;12、调节装置;13、摄像头;14、转向装置;121、限位杆;122、移动块;123、限位孔;124、第一电机;125、螺杆;126、传动杆;141、安装板; 142、第二电机;143、固定杆;144、弧形导杆;145、转动块;146、弧形导槽。
具体实施方式
20.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
21.以下结合具体实施例对本发明的具体实现进行详细描述。
22.请参阅图1至图3,本发明实施例提供的一种警用无人巡逻船及其图像采集机构,警用无人巡逻船包括巡逻船本体1、基座2、安装块3、定位块4、定位导槽5、弹簧6、立柱7、连接杆8、电动伸缩杆9、连接框10、安装架11、调节装置12、摄像头13和转向装置14,巡逻船本体1的船头顶部固定安装有基座2,基座2的中部安装有安装块3,基座2的内壁对称固定安装有定位块 4,安装块3的外侧对称开设有定位导槽5,定位块4与定位导槽5滑动连接,定位块4的宽度小于与定位导槽5的宽度设置,定位块4的外侧套设有弹簧6,弹簧6的一端与基座2的内壁固定连接,弹簧6的另一端与安装块3的表面贴合设置,立柱7固定安装在安装块3的
顶部,立柱7的顶部通过轴销转动安装有连接杆8,立柱7的一侧底部通过轴销转动安装有电动伸缩杆9,电动伸缩杆9的移动端通过轴销与连接杆8转动连接,连接框10固定安装在连接杆8 远离立柱7的一端,连接框10远离连接杆8的一端内部通过轴销转动安装有安装架11,连接框10的内部固定安装有用于对安装架11进行过转动的调节装置12,调节装置12包括限位杆121、移动块122、限位孔123、第一电机 124、螺杆125和传动杆126,限位杆121对称固定安装在连接框10的内部,两个限位杆121之间滑动安装有移动块122,移动块122对应限位杆121的位置开设有限位孔123,限位孔123与限位杆121滑动连接,第一电机124固定安装在连接框10的内部一端,第一电机124的输出端固定安装有螺杆125,螺杆125远离第一电机124的一端与连接框10的内壁通过轴承转动连接,螺杆125与移动块122的中部螺纹连接,传动杆126通过轴销转动安装在移动块 122的顶部,传动杆126远离移动块122的一端通过轴销与安装架11的一端顶部转动连接,摄像头13安装在安装架11的中部,安装架11的中部安装用于对摄像头13进行转动的转向装置14。
23.需要说明的是:巡逻船本体1在使用时,当巡逻船本体1遇上有风浪的区域时,巡逻船本体1将出现抖动,在巡逻船本体1抖动时,将带动安装块3 在基座2的中部在四个方向摆动,在安装块3移动时,定位块4的定位导槽5 将顺着定位块4全方位的移动,同时通过四个弹簧6对安装块3的挤压,将带动定位块4在基座2的中部的振幅减小,提高摄像头13的拍摄效果,在将摄像头13移动至水底进行监测时,通过电动伸缩杆9的拉动将带动连接杆8在立柱7的顶部转动,进而将带动摄像头13移动至水底,与此同时,通过第一电机124的运作带动螺杆125的转动,通过螺杆125与移动块122的螺纹连接以及限位杆121对移动块122的限位实现对移动块122的移动,通过传动杆 126的连接将带动安装架11在连接框10中的转动,实现摄像头13拍摄角度的变化。
24.在本发明的实施例中,请参阅图1至图3,定位块4与定位导槽5均呈方形设置,定位块4与定位导槽5紧密贴合滑动;
25.需要说明的是:实现安装块3顺着定位块4的轨迹移动的稳定性,同时保证安装块3的移动区间。
26.在本发明的实施例中,请参阅图1至图3,第一电机124为一种减速伺服电机;
27.需要说明的是:实现对摄像头13拍摄角度的精准控制。
28.在本发明的实施例中,请参阅图1至图3,限位孔123与限位杆121紧密贴合滑动;
29.需要说明的是:实现移动块122顺着限位杆121滑动的稳定性。
30.在本发明的实施例中,请参阅图1至图3,转向装置14包括安装板141、第二电机142、固定杆143、弧形导杆144、转动块145和弧形导槽146,安装板141固定安装在安装架11的中部,安装板141的顶部固定安装有第二电机 142,第二电机142的输出端固定安装有固定杆143,弧形导杆144对称固定安装在安装架11的内部,两个弧形导杆144之间滑动安装有转动块145,转动块145对应弧形导杆144的位置开设有弧形导槽146,弧形导槽146与弧形导杆144滑动连接,固定杆143远离第二电机142的一端与转动块145的内壁固定连接,转动块145的一侧与摄像头13固定连接;
31.需要说明的是:在对摄像头13左右转动时,通过第二电机142的运作带动固定杆143转动,进而将带动转动块145顺着弧形导杆144的轨迹转动,实现摄像头13转动角度的调节,扩大摄像头13的拍摄范围。
32.在本发明的实施例中,请参阅图1至图3,弧形导槽146与弧形导杆144 紧密贴合滑动;
33.需要说明的是:实现转动块145顺着弧形导杆144的轨迹转动的稳定性。
34.在本发明的实施例中,请参阅图1至图3,第二电机142的输出端、弧形导杆144的中轴和转动块145的转动中心同轴设置;
35.需要说明的是:实现摄像头13的转动作用。
36.本方案还包括一种警用无人巡逻船的图像采集机构,包括上述任一的警用无人巡逻船。
37.巡逻船本体1在使用时,当巡逻船本体1遇上有风浪的区域时,巡逻船本体1将出现抖动,在巡逻船本体1抖动时,将带动安装块3在基座2的中部在四个方向摆动,在安装块3移动时,定位块4的定位导槽5将顺着定位块4 全方位的移动,同时通过四个弹簧6对安装块3的挤压,将带动定位块4在基座2的中部的振幅减小,提高摄像头13的拍摄效果,在将摄像头13移动至水底进行监测时,通过电动伸缩杆9的拉动将带动连接杆8在立柱7的顶部转动,进而将带动摄像头13移动至水底,与此同时,通过第一电机124的运作带动螺杆125的转动,通过螺杆125与移动块122的螺纹连接以及限位杆121对移动块122的限位实现对移动块122的移动,通过传动杆126的连接将带动安装架11在连接框10中的转动,实现摄像头13拍摄角度的变化,在对摄像头13 左右转动时,通过第二电机142的运作带动固定杆143转动,进而将带动转动块145顺着弧形导杆144的轨迹转动,实现摄像头13转动角度的调节,扩大摄像头13的拍摄范围。
38.本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
39.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1