一种浓酱粘稠食品罐装控制系统、灌装设备
1.本实用新型属于实用新型涉及自动控制技术领域,具体涉及一种浓酱粘稠食品罐装控制系统和灌装设备。
背景技术:
2.目前,随着科学技术的快速发展和生产力水平的提高,对于传统的手工劳动业的冲击比较大。很多企业开始对降低劳动强度并且逐渐重视提高设备的自动化程度。随着我国食品包装行业的蓬勃发展,现代的自动灌装生产线向着以可编程控制器作为基础发展,其控制系统操作方便,自动化水平较高,大大的提高了生产效率。由于很多食品属于具有一定粘度的固液混合流体,对于控制要求以及工艺过程尤为特殊,因此关于浓酱粘稠食品的灌装设备和搅拌设备控制系统研究的比较少。本专利从浓酱粘稠食品的搅拌特性以及灌装技术为基础,确定了浓酱粘稠食品流体的控制要求,并结合工艺过程,提出基于伺服电机控制的一种浓酱粘稠食品罐装控制系统和基于复杂事件处理技术的故障预警方法,为提高灌装精度以及控制系统的稳定、可靠性做出了一定的贡献。
技术实现要素:
3.本实用新型的目的是为克服已有技术的不足,提出一种浓酱粘稠食品罐装控制系统。
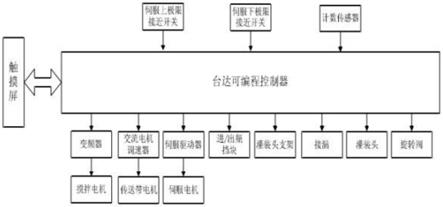
4.本实用新型提供了一种浓酱粘稠食品罐装控制系统,其特征在于,该系统包括可编程控制器、触摸屏、搅拌模块、输送模块和灌装模块;可编程控制器与触摸屏、搅拌模块、输送模块、灌装模块电连接;搅拌模块包括变频器和搅拌电机,通过变频器控制交流电机的转速,达到对食品搅拌目的;输送模块包括交流电机调速器和传送带电机,通过交流电机调速器控制传送带电机将食品输送至灌装模块;灌装模块由伺服驱动器、伺服电机、灌装头、灌装头支架、旋转阀、进/出瓶挡块和接漏元件组成,伺服驱动器带动伺服电机通过电磁阀的气动系统控制灌装头、灌装头支架、旋转阀、进/出瓶挡块、接漏元件的运作。
5.进一步地,触摸屏上设有动力大小、搅拌方式、流动状态和运转条件参数的输入窗口,通过触摸屏操作可编程控制器控制搅拌模块,根据搅拌扭矩,食品流出流量,流出流速,循环时间等特定需求,设置搅拌时所需的动力、搅拌方式、流动状态和运转条件的参数,以设定的流量和流速将食品推送至输送模块;
6.进一步地,所述搅拌模块包括卧式螺旋螺带叶轮型式搅拌机,由安装于搅拌轴上的连续式螺带在槽体内最大范围翻动食品,不断搅动槽体内食品升高到一定高度,再使其自由下落;在将底部食品搅起到高处的同时,由于离心作用,搅拌器工作时螺旋带动靠近轴心处食品做轴心旋转,由内至外侧推动,同时自由下落的食品又重新落回到轴心附近,造成物料在桶体内对流循环、剪切渗混,完成食品在较短时间内快速均匀混合。
7.进一步地,伺服驱动器的控制方式为:在伺服驱动器设置位置控制的模式下,可编程控制器发出位置指令的脉冲信号和方向指令的信号,其中位置脉冲信号与电动机发出的
输出位置反馈脉冲型号进行比较后形成变差信号,传送给位置控制单元,在位置控制单元形成速度指令后发给速度回路,经过比例积分控制器的调节后,生成电流指令信号,通过电流回路控制交流伺服电机的旋转。
8.进一步地,所述电磁阀均选用二位五通电磁换向阀,如图3为气动控制系统电路图,可编程控制器扩展模块dvp-16sp与五个电磁阀相连接,用于对电磁阀进行控制。
9.进一步地,一种浓酱粘稠食品罐装控制系统所述的搅拌电机为:台州波导机电的y2系列三相异步电动机,功率0.37kw,额定电流1.12a,转速1330rpm;变频器为:深圳步科电气有限公司的cv100系列变频器,具有高转矩、高精度、宽频调速驱动等特点,满足了通用变频器高性能化需求。
10.进一步地,一种浓酱粘稠食品罐装控制系统所述的交流电机调速器为: fs32b系列单相异步电动机电子调速控制器采用最新电子线路集成,具有体积小,精密度高,调速范围宽,能耗低,稳定性强,使用方便的特点。
11.进一步地,一种浓酱粘稠食品罐装控制系统所述的伺服驱动器为: asda-b2型;伺服电机为:ecma-c21010rs,额定输出功率1kw,额定电压220v,额定转速3000rpm,无刹车有油封。
12.本实用新型与现有技术相比,其有益的技术效果为:本系统运行稳定可靠,满足灌装质量的要求。由于食品灌装还在试制阶段,相关机械结构还有许多需要改进的地方,但对于控制系统而言,基本已经达到厂商要求的各项功能,系统的研制成功,可以有效促进食品行业的灌装生产效率,产生较大的经济效益,亦可广泛的用于粘性流体灌装行业,对我国的灌装设备的发展产生较大的促进作用。
附图说明
13.图1是浓酱粘稠食品罐装控制系统的原理图。
14.图2是伺服驱动器控制原理图。
15.图3是电磁阀气动控制电路图。
16.图4是本实用新型的系统工作步骤流程图。
具体实施方式
17.一种浓酱粘稠食品罐装控制系统,该系统包括可编程控制器、触摸屏、搅拌模块、输送模块和灌装模块;可编程控制器与触摸屏、搅拌模块、输送模块、灌装模块电连接;搅拌模块包括变频器和搅拌电机,通过变频器控制交流电机的转速,达到对食品搅拌目的;输送模块包括交流电机调速器和传送带电机,通过交流电机调速器控制传送带电机将食品输送至灌装模块;灌装模块由伺服驱动器、伺服电机、灌装头、灌装头支架、旋转阀、进/出瓶挡块和接漏元件组成,伺服驱动器带动伺服电机通过电磁阀的气动系统控制灌装头、灌装头支架、旋转阀、进/出瓶挡块、接漏元件的运作。
18.所述系统的对浓酱粘稠食品罐装控制的方法如下:
19.步骤1,通过触摸屏操作可编程控制器控制搅拌模块,根据搅拌扭矩,食品流出流量,流出流速,循环时间等特定需求,设置搅拌时所需的动力、搅拌方式、流动状态和运转条件的参数,以设定的流量和流速将食品推送至输送模块;
20.具体是搅拌方式为卧式螺旋螺带叶轮型式,由安装于搅拌轴上的连续式螺带在槽体内最大范围翻动食品,不断搅动槽体内食品升高到一定高度,再使其自由下落;在将底部食品搅起到高处的同时,由于离心作用,搅拌器工作时螺旋带动靠近轴心处食品做轴心旋转,由内至外侧推动,同时自由下落的食品又重新落回到轴心附近,造成物料在桶体内对流循环、剪切渗混,完成食品在较短时间内快速均匀混合。
21.步骤2,通过可编程控制器对输送模块的传送带电机速度进行调节,以便调节所需的食品灌装总量,将食品输送至灌装模块;
22.步骤3,通过可编程控制器对罐装模块的伺服电机驱动器发送指令,驱动伺服电机对电磁阀极限位置进行气动控制;
23.具体是伺服驱动器的控制方式如图2所示,在伺服驱动器设置位置控制的模式下,可编程控制器发出位置指令的脉冲信号和方向指令的信号,其中位置脉冲信号与电动机发出的输出位置反馈脉冲型号进行比较后形成变差信号,传送给位置控制单元,在位置控制单元形成速度指令后发给速度回路,经过比例积分控制器的调节后,生成电流指令信号,通过电流回路控制交流伺服电机的旋转。
24.气动控制方式为:气动控制对象包括了对灌装头、灌装头支架、接漏、进/出瓶挡块等元件开关的控制。所有的电磁阀均选用二位五通电磁换向阀,如图3为气动控制系统电路图,可编程控制器扩展模块dvp-16sp与五个电磁阀相连接,用于对电磁阀进行控制。
25.步骤4,进/出瓶挡块开启后设定计数功能,当进瓶数量达到所需要求的时候执行下一轮的灌装动作;
26.步骤5,系统对各个模块的运行状态进行实时监测,当出现故障时发出预警信号,并通过复杂事件处理技术对故障点进行自动定位。
27.具体是通过浓酱粘稠食品罐装控制系统的数据传输网络,对各模块的信息实时自动采集,对采集的数据,利用复杂事件处理技术,进行数据融合处理,得到系统异常信息,生成故障定位信息。
28.具体是设s表示浓酱粘稠食品罐装控制系统,按结构和功能对s进行层次分解s={s1,s2,...,s
n
},其中s
i
={i,1,2,...,n}是s的子系统,根据系统结构划分为s1、s2、s3三个子模块,分别代表搅拌模块、输送模块和灌装模块,系统s对应的有向图为d={v,e},其中:
29.v={s1,s2,s3}
30.是以子模块为节点的集合,e=s
×
s,为连接节点的有向边集合,衔接关系并且s
i
rs
j
,s
i
,d中由s
i
到s
j
的有向边用e
ij
=(s
i
,s
j
) 表示,本系统s的有向边集合:
31.e={e
ij
|s
i
rs
j
,i=1,2,3,j=1,2,3,i≠j}
32.继续向下按子模块的结构功能进行分解,将搅拌模块s1划分为s
11
、s
12
,代表变频器和搅拌电机,其对应的有向图d1={v1,e1},同理可得到输送模块 s2和灌装模块s3的有向图d2、d3。
33.系统s发生故障,则s1、s2和s3中至少有一个发生故障。而子模块的故障又是由其低层设备故障所致。因此,构建故障树时搜索顶层元素对应的有向图d={v,e},读取其节点集合v中的节点s1、s2、s3,将它们的失效模式作为故障树的下一层。接着分别搜索s1、s2、s3对应
的有向图d1、d2、d3,把v1中的节点s
11
、s
12
作为导致s1故障的直接原因,以此类推通过对系统进行层次分解,构建系统的故障树,根据故障树,实现对系统故障进行分层定位。
34.一种浓酱粘稠食品罐装控制系统所述的搅拌电机为:台州波导机电的y2 系列三相异步电动机,功率0.37kw,额定电流1.12a,转速1330rpm;变频器为:深圳步科电气有限公司的cv100系列变频器,具有高转矩、高精度、宽频调速驱动等特点,满足了通用变频器高性能化需求。
35.一种浓酱粘稠食品罐装控制系统所述的交流电机调速器为:fs32b系列单相异步电动机电子调速控制器采用最新电子线路集成,具有体积小,精密度高,调速范围宽,能耗低,稳定性强,使用方便的特点。
36.一种浓酱粘稠食品罐装控制系统所述的伺服驱动器为:asda-b2型;伺服电机为:ecma-c21010rs,额定输出功率1kw,额定电压220v,额定转速3000rpm,无刹车有油封。
37.以上对本实用新型进行了详细介绍,本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的表明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本表明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1