一种绕线机飞叉无动力动平衡测试装置的制作方法
[0001]
本实用新型涉及回转体动平衡测试装置,特别涉及一种绕线机飞叉无动力动平衡测试装置。
背景技术:
[0002]
绕线机飞叉由于高速旋转,对动平衡要求非常高,否则机器容易发生振动,轻则生产出来的产品品质不好,重则发生安全事故,所以飞叉结构设计很重要。绕线机飞叉大体分为完全对称结构和非对称结构两种。完全对称结构可以做到比较好的动平衡状态,但是绕线模具稳定机构需要做两组,体积大,成本高。非对称结构只有一组绕线模具稳定机构,由于各部分质量不同,动平衡很差,优点是结构简单,成本低。
[0003]
由于市面上没有针对此类产品专用的动平衡机,没有相应的测试方法和工具,所以有很多厂家为了提高绕线速度,不得不采用完全对称的飞叉结构。如果能够使非对称结构的飞叉达到比较好的动平衡性能,就可以使高速绕线机飞叉的制造成本大大降低。
[0004]
本实用新型就是针对非对称结构的飞叉研发的无动力测试工具。
技术实现要素:
[0005]
本实用新型的目的是克服现有技术存在的缺陷,提供一种针对非对称结构的飞叉研发的无动力测试需求,提供一种绕线机飞叉无动力动平衡测试装置。
[0006]
实现本实用新型目的的技术方案是:一种绕线机飞叉无动力动平衡测试装置,包括底座、外环、外环旋转部、内环、内环旋转部、芯轴;所述外环通过水平径向两端设置的外环旋转部与底座内侧可旋转连接,所述内环通过竖直径向两端设置的内环旋转部与外环内侧可旋转连接,所述芯轴与外环旋转部同轴可旋转地设置在内环内侧。
[0007]
进一步的,所述外环旋转部包括底座固定块、外环固定块底座轴承与外环旋转轴;所述底座固定块安装在底座上,所述外环固定块安装在外环上,所述底座轴承安装在外环固定块内,所述外环旋转轴一端固定在底座轴承内,另一端固定在外环固定块内。
[0008]
进一步的,所述内环旋转部包括外环内固定块、内环固定块、内环轴承和内环旋转轴;所述外环内固定块安装在外环内侧,所述内环固定块安装在内环上,所述内环轴承安装在外环内固定块内侧,所述内环旋转轴一端固定在内环轴承内,另一端固定在内环固定块内。
[0009]
进一步的,所述芯轴通过芯轴轴承固定在芯轴固定块内,所述芯轴固定块固定在所述内环内侧。
[0010]
进一步的,所述外环与内环上均匀布置有若干减重孔。
[0011]
进一步的,所述底座轴承为低滚阻高精度混合陶瓷球轴承。
[0012]
进一步的,所述内环轴承为低滚阻高精度混合陶瓷球轴承。
[0013]
进一步的,芯轴轴承为低滚阻高精度混合陶瓷球轴承。
[0014]
采用上述技术方案后,本实用新型具有以下积极的效果:
[0015]
(1)本实用新型装置结构简单,使用简便。
[0016]
(2)本实用新型解决了非对称飞叉动平衡测试问题,可以使非对称飞叉真正应用于高速绕线机。
附图说明
[0017]
为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
[0018]
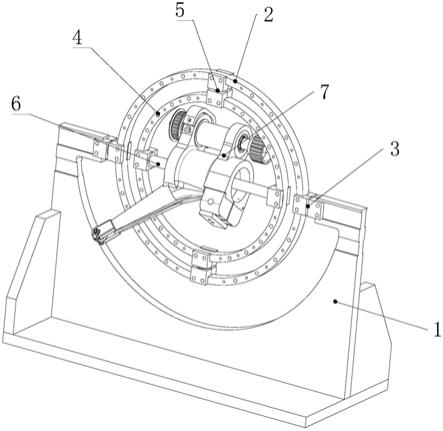
图1为本实用新型的轴侧视图;
[0019]
图2为本实用新型的正视图;
[0020]
图3为内环旋转部内的具体结构示意图;
[0021]
图4为外环旋转部与芯轴内的具体结构示意图
具体实施方式
[0022]
(实施例1)
[0023]
见图1-图4,本实用新型装置具有底座1、外环2、外环旋转部3、内环4、内环旋转部5、芯轴6;所述外环2通过水平径向两端设置的外环旋转部3与底座1内侧可旋转连接,所述内环4通过竖直径向两端设置的内环旋转部5与外环2内侧可旋转连接,所述芯轴6与外环旋转部3同轴可旋转地设置在内环4内侧。所述外环旋转部3包括底座固定块31、外环固定块32底座轴承33与外环旋转轴34;所述底座固定块31安装在底座1上,所述外环固定块32安装在外环2上,所述底座轴承33安装在外环固定块32内,所述外环旋转轴34一端固定在底座轴承33内,另一端固定在外环固定块32内。所述底座轴承33为低滚阻高精度混合陶瓷球轴承。所述内环旋转部5包括外环内固定块51、内环固定块52、内环轴承53和内环旋转轴54;所述外环内固定块51安装在外环2内侧,所述内环固定块52安装在内环4上,所述内环轴承53安装在外环内固定块51内侧,所述内环旋转轴54一端固定在内环轴承53内,另一端固定在内环固定块52内。所述内环轴承53为低滚阻高精度混合陶瓷球轴承。所述芯轴6通过芯轴轴承62固定在芯轴固定块61内,所述芯轴固定块61固定在所述内环4内侧。芯轴轴承62为低滚阻高精度混合陶瓷球轴承。所述外环2与内环4上均匀布置有若干减重孔8。
[0024]
本实用新型的工作原理为:固定底座1,将内环4与外环2摆到水平位置,将飞叉7穿过芯轴6,以飞叉7主轴孔为旋转部y,平衡旋转部y法向平面的质量,通过在各个面打螺钉孔锁配重块,使质点落在旋转部y上;
[0025]
将飞叉调整至垂直状态,锁定芯轴6使得飞叉7不能绕旋转部y旋转,然后沿旋转部y方向前后平移飞叉,通过飞叉7相对z轴的平衡状态不断调整飞叉7位置,使其质点落在z轴上,此时惯量主轴i
z
与z轴重合;
[0026]
松开芯轴6,使用压缩空气驱动飞叉7绕旋转部y快速转动,停止吹气,飞叉7做无动力惯性旋转,由于惯量主轴i
y
与y轴不重合,y轴会以i
z
为转轴摆动一个水平角度α,通过在飞叉7上对称的a、b两处做相同重量的加重平衡,使y轴摆回水平位置,此时惯量主轴i
y
与y轴重合;
[0027]
飞叉7的三个惯量主轴与x、y、z三个坐标轴重合并通过飞叉7质心,飞叉达到随动平衡状态。
[0028]
以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1