基于自基准面的叶片三维型面轮廓高精度匹配方法
1.本发明属于叶片检测领域,具体涉及一种基于自基准面的叶片三维型面轮廓高精度匹配方法。
背景技术:
2.叶片作为航空发动机、燃机、汽轮机等设备中的关键零部件,承担着将热能转化为机械能的重要任务,叶片的形状及质量直接影响整机的能量转换效率和使用寿命。叶片因其截面为不规则曲面且每个截面高度的型线轮廓不相同给叶片检测工作增加了难度。
3.中国发明专利2020111309847公开了一种基于叶片自特征的叶片三维轮廓重建方法,该方法利用叶片的两个侧基准面相连的特性对转台中心标定进行标定,该方法虽然没有引入外标定块实现对转台中心的标定,但是仅仅标定出一个转台中心,再以过转台中心的竖直直线为z轴,导致实际的回转轴线与叶片轴线不平行,进而导致后期拼接数据存在误差。
技术实现要素:
4.本发明的目的在于提供一种基于自基准面的叶片三维型面轮廓高精度匹配方法,该方法利用叶片自基准面求解出回转轴线,保证回转轴线和叶片轴线平行,进而提高叶片的检测精度。
5.为实现上述目的,本发明采用如下技术方案:基于自基准面的叶片三维型面轮廓高精度匹配方法,所述自基准面是指两个相交的侧面基准面a和基准面b、以及与基准面a和基准面b均垂直的基准面c,包括如下步骤:步骤1:对回转轴线的标定a.将叶片放置于转台面上,并调整线激光传感器的位姿,使线激光传感器的激光面与基准面a和基准面b同时相交,且激光面与基准面c重合;线激光传感器沿z轴移动并采集叶片的轮廓的点云数据m1,移动距离不超过基准面a或基准面b在z轴上的高度,根据点云数据m1拟合出面p
a1
和p
b1
;b.调整线激光传感器位姿到激光面与基准面a和基准面b同时相交,且激光面与基准面c重合,转动转台后线激光传感器的激光面依然同时与基准面a和基准面b相交,且转动角度为θ,线激光传感器再次沿z轴移动并采集叶片的轮廓的点云数据m2,移动距离不超过基准面a或基准面b的高度,根据点云数据m2拟合出面p
a2
和p
b2
;c.根据面p
a1
和p
b1
之间的夹角求出角平分面p1,以及面p
a2
和p
b2
之间的夹角求出角平分面p2,再求解出角平分面p1和p2相交的直线l,所述直线即为回转轴线;步骤2:对叶片进行全局扫描获取叶片的三维轮廓建立全局坐标系o
‑
xyz,所述全局坐标系o
‑
xyz以回转轴线与基准面c交点为原点o,以基准面c上两个相互垂直且过原点的向量为x轴和y轴,以回转轴线为z轴,调整线激光传感器的位姿,使线激光传感器的激光面与叶片的初始位置相交,线激光传感器以z轴为扫
描方向前进对叶片轮廓进行扫描,然后调整线激光传感器回到初始位置并转动转台再以z轴为扫描方向前进对叶片轮廓进行扫描,叶片全部扫描后将线激光传感器采集的轮廓数据转换至数据坐标系中进行曲面拟合获得叶片的三维轮廓。
6.与现有技术相比,本发明利用叶片具有两个相交的侧基准面对回转轴线进行标定,适用于所有的叶片的标定,并且通过该自特征对回转轴线标定的结果更加精确,不仅适用于所有叶片,提高检测方法的通用性和效率,而且较于传统方法较少了误差传递链长度,增加了轮廓重建精度。
附图说明
7.图1为本发明的检测装置示意图。
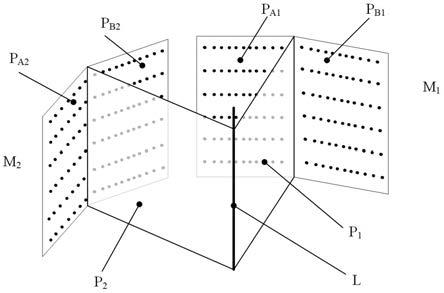
8.图2为本发明标定回转轴线的结构示意图。
9.图3为图2的俯视图。
10.图中标记:100、线激光传感器;200、叶片;201、基准面a;202、基准面b;203、基准面c。
具体实施方式
11.本实施例提供了一种基于自基准面的叶片三维型面轮廓高精度匹配方法,该方法公开了一种回转轴线的标定方法,该标定方法与现有技术相比,使用范围更广,检测数据更加精确。所述叶片200自基准面是指叶片200加工时加工的两个侧基准面a201、基准面b202和水平基准面c203,基准面a201和基准面b202相交,且与基准面c203垂直,该自基准面是所有叶片200共有的特征,且具有较高的平面度,可被视为高精度平面特征,本实施例的方法就是利用两个基准面a201和基准面b202且相交的特性对回转轴线标定。
12.本实施所述的一种基于自基准面的叶片三维型面轮廓高精度匹配方法包括如下步骤:步骤1:叶片安装前的检测装置标定如图1所示,所述检测装置包括线激光传感器100、控制线激光传感器在移动坐标系o
‑
xyz内移动的平移驱动(s
x
、s
y
、s
z
)、以及控制转台的旋转的旋转驱动w;所述转台上必然存在转动中心;叶片200安装前需要对检测装置进行标定,保证后续的采集的精确度,所述标定包括对线激光传感器100位姿标定和转台面标定;所述标定方法与现有技术相同,本实施例不在赘述。
13.步骤2:对转台转动中心标定a.将叶片200放置于转台面上,并通过控制平移驱动(s
x
、s
y
、s
z
)调整线激光传感器100的位姿,使线激光传感器100的激光面与基准面a201和基准面b202同时相交,且激光面与基准面c203重合,线激光传感器沿z轴移动并采集叶片的轮廓的点云数据m1,移动距离不超过基准面a或基准面b的高度,根据点云数据m1拟合出面p
a1
和p
b1
。
14.b.调整线激光传感器100使其位于初始位置,初始位置即为线激光传感器100的激光面与基准面a201和基准面b202同时相交,且激光面与基准面c203重合,通过控制旋转驱动w转动转台,线激光传感器100的激光面依然同时与基准面a201和基准面b202相交,且转动角度为θ,线激光传感器再次沿z轴移动并采集叶片的轮廓的点云数据m2,移动距离不超
过基准面a或基准面b的高度,根据点云数据m2拟合出面p
a2
和p
b2
。
15.c.步骤a和步骤b中线激光传感器100的在x轴和y轴的位姿没有发生变化,因此线激光传感器100的数据坐标没有发生变化,因此,求出面p
a1
和面p
b1
的角平分面p1,以及面p
a2
和面p
b2
的角平分面p2;如图2和图3所示,角平分面p1和p2的交线l即为叶片的回转轴线,通过直线l即可完成回转轴线的标定和叶片三维轮廓的重构;本实施例采用两个相交的高精度平面特征标定转动中心,其标定结果更精确。
16.步骤3:叶片三维轮廓重建所述线激光传感器100连接有直线编码器,直线编码器与平移驱动s
z
连接,将线激光传感器的工作模式改为编码器触发模式,每次平移距离由系统设置,实现自动采集数据,可降低工作人员的劳动强度,以及提供数据采集的精度。
17.a.通过控制平移驱动(s
x
、s
y
、s
z
)调整线激光传感器100的激光面与叶片200的初始位置相交,所述初始位置是指叶片200的底部或叶片200的顶部,本实施例选择叶片200的底部,因此后续的扫描放线是向上移动,反之反向,具体为叶片200侧边基准面所在一截,尽可能靠近叶片200特征。
18.b.本实施以z轴为扫描方向,设置触发距离,触发线激光传感器100采集一次叶片200轮廓数据,设置z轴运动范围,运动范围为叶片200在z轴上的高度,具体设置是要超过叶片200在z轴上的高度,保证叶片200能被完全采集,当平移驱动s
z
向上移的总距离超过z轴运动范围时,控制平移驱动s
z
使线激光传感器回到初始位置。
19.c.通过控制平移驱动(s
x
、s
y
)和旋转驱动w,使线激光传感器100的激光面与叶片200未进行轮廓数据采集的一侧相交。
20.d.重复步骤b和步骤c,直到叶片200所有的轮廓均被扫描。
21.e.叶片三维轮廓重建,将所有采集的轮廓数据转换至线激光传感器100的数据坐标系o
‑
xyz中去除重叠数据后进行去曲线拟合获取叶片200三维轮廓,数据坐标系o
‑
xyz是以基准面c和步骤2获取的回转轴线交点为原点o,以基准面c上两个相互垂直且过原点的向量为x轴和y轴,以回转轴线为z轴;将所述叶片200三维轮廓数据导入电脑软件内可与实现设计的图形进行对比检测出误差之处,实现了对叶片轮廓的检测。
22.以上所述仅是本发明优选的实施方式,但本发明的保护范围并不局限于此,任何基于本发明所提供的技术方案和发明构思进行的改造和替换都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1