一种基于无人机的船舶航行信号灯检验方法与流程
1.本发明属于船舶检验领域,涉及一种基于无人机的船舶航行信号灯检验方法。
背景技术:
2.在船舶建造过程中,一些检验环节必不可少,但是检验会浪费大量的人力物力,不利于降低建造成本。特别是针对船台建造的船舶,下水后,试航前必须对航行信号灯进行检验,角度调整,方案修改等。目前在检验过程中存在以下问题:
3.一、船舶下水后,一般周期比较长,不利于用无人机对航行信号灯进行检验,坐标点无法确认;
4.二、运用传统的方法检验航行信号灯,需要拖轮配合,在海上逐一检验,围着船舶前后左右跑,风浪大,检验结果往往不能一次性合格,费时费力;
5.三、在使用拖轮配合检验航行灯时,参加检验人员众多,安全风险更大,对船舶试航周期不利。
6.综上,现有的航行信号灯检验方法存在效率低、安全性差、成本高的缺点,需要研究出一种效率高、操作简单、成本低且安全性高的检验方法来满足航行信号灯的检验需要。
技术实现要素:
7.本发明所要解决的技术问题是提供一种基于无人机的船舶航行信号灯检验方法,具有效率高、操作简单、成本低且安全性高的特点。
8.本发明解决上述技术问题所采用的技术方案为:一种基于无人机的船舶航行信号灯检验方法,其特征在于:采用无人机对船舶航行信号灯进行检验,具体包括以下步骤:
9.1)在建船舶的具体位置,水平船坞或者倾斜船台,绘制船舶两侧的参考线,根据航行信号灯的角度绘制航行信号灯的角度线,其中水平船坞航行信号灯的角度线与参考线无高度差,倾斜船台则需要根据船台坡度计算交点的高度差;
10.2)航行信号灯的角度线与参考线的交点处即为无人机的水平投影位置,将信号灯的角度线与参考线的交点根据现场放样绘制在相应的地面上,确定交点a、a1、b、b1、b2、b3、c、c1、d、d1;其中a、b、c、d分别代表前桅灯、舷灯、后桅灯及艉灯的角度线,1代表左侧,否则无,代表右侧;b2、b3为舷灯1
°
到3
°
之间灯光减弱,到3
°
时灯光消失的位置点;
11.3)根据航行信号灯的实际高度,确定每个交点a、a1、b、b1、b2、b3、c、c1、d、d1的高度值;
12.4)交点及高度值就是在信号灯检验过程中无人机的准确位置;
13.5)通电打开船舶航行信号灯,用遥控器操作无人机,飞至指点的位置,通过视频确定航行信号灯的角度调节位置,根据无人机的位置调整航行信号灯的角度,直至航行信号灯临界照射角度线与无人机重合,达到检验合格的标准。
14.进一步,所述步骤1)的参考线是以船体中心线为基准,由人为定义;信号灯角度线是根据信号灯照明角度,在船台画出角度线的位置。
15.进一步,所述步骤3)航行信号灯的实际高度即为航行信号灯在船上实际安装位置以船台面为基准的高度值,当倾斜船台时,交点的高度值为:交点在航行信号灯之上需要加上坡度差,反之则要减掉坡度差。
16.进一步,所述步骤4)无人机的准确位置是指无人机的高度位置及水平投影位置。
17.再进一步,所述步骤5)用遥控器操作无人机的具体过程为:当无人机通过手机遥控操作,飞至指定位置悬停,通过无人机摄像头反馈到智能手机上看航行信号灯的照射范围,当无人机向照射盲区缓慢水平飞行时,离开交点坐标且看不到航行信号灯的光线时,即为检验合格;否则调整航行信号灯的角度,直至合格为止。
18.进一步,所述信号灯角度线是根据信号灯照明角度,在船台画出角度线的位置,是信号灯的投射出去方向最侧面位置。
19.最后,所述交点b2、b3是在船艏方向有一根垂直船体中线的参考线,舷灯与参考线的垂直距离为l,船舶半宽值为m,即b2=m
‑
ltan3
°
、b3=m
‑
ltan1
°
进行确定位置,并分布在这个参考线上。
20.与现有技术相比,本发明的优点在于:通过无人机对船舶航行信号灯的检验,具有操作简单、成本低且安全性高的特点,检验人员在地面就可以完成航行信号灯的检验工作,1小时左右完成全部检验工作,有效提高检验效率,缩短船舶试航周期,节省了人工成本及拖轮油耗等费用,降低造船成本,同时也降低了现场检验人员安全风险,提高检验安全性,提高了检验质量,具有重要的经济效益与社会效益。
附图说明
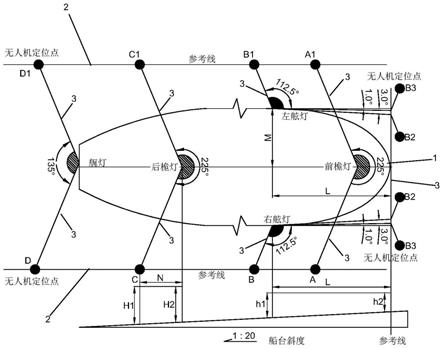
21.图1是本发明提供的船舶航行信号灯观测点分置图。
具体实施方式
22.以下结合附图实施例对本发明作进一步详细描述。
23.如图1所示,一种基于无人机的船舶航行信号灯检验方法,采用无人机对船舶航行信号灯进行检验,具体包括以下步骤:
24.1)在建船舶的具体位置,水平船坞或者倾斜船台1,绘制船舶两侧的参考线2,根据航行信号灯的角度绘制航行信号灯的角度线3,其中水平船坞航行信号灯的角度线与参考线无高度差,倾斜船台则需要根据船台坡度计算交点的高度差;
25.参考线1是以船体中心线为基准,由人为定义,通常是平行于水平船坞或者倾斜船台的中心线;信号灯角度线3是根据信号灯照明角度,在船台画出角度线的位置,通常是信号灯的投射出去方向最侧面位置。
26.2)航行信号灯的角度线3与参考线2的交点处即为无人机的水平投影位置,将信号灯的角度线3与参考线2的交点根据现场放样绘制在相应的地面上,确定交点a、a1、b、b1、b2、b3、c、c1、d、d1的无人机定位点;其中a、b、c、d分别代表前桅灯、舷灯、后桅灯及艉灯的角度线3,1代表左侧,否则无,代表右侧;b2、b3分别为舷灯1
°
到3
°
之间灯光减弱,到3
°
时灯光消失的位置点。在船艏方向有一根垂直船体中线的参考线3,舷灯与参考线3的垂直距离为l,船舶半宽值为m,即b2=m
‑
ltan3
°
、b3=m
‑
ltan1
°
,并分布在这个参考线3上。
27.3)根据航行信号灯的实际高度,确定每个交点a、a1、b、b1、b2、b3、c、c1、d、d1的高
度值;航行信号灯的实际高度即为航行信号灯在船上实际安装位置以船台面为基准的高度值,当倾斜船台时,交点的高度值为:交点在航行信号灯之上需要加上坡度差,反之则要减掉坡度差。以后桅灯、舷灯为例,来确定c、c1、b2、b3的高度值,即后桅灯高度值h2已知,舷灯高度值h1已知,舷灯高度值h1已知,根据相同方法进行计算,确定交点a、a1、b、b1、c、c1、的高度值,得出的结论是航行信号灯与参考线交点在坡上的就需要减掉坡度差,反之加上坡度差。
28.4)交点及高度值就是在信号灯检验过程中无人机的准确位置,即无人机的高度位置及水平投影位置;
29.5)通电打开船舶航行信号灯,用遥控器操作无人机,飞至指点的位置,通过视频确定航行信号灯的角度调节位置,根据无人机的位置调整航行信号灯的角度,直至航行信号灯临界照射角度线与无人机重合,达到检验合格的标准;用遥控器操作无人机的具体过程为:当无人机通过手机遥控操作,飞至指定位置悬停,通过无人机摄像头反馈到智能手机上看航行信号灯的照射范围,当无人机向照射盲区缓慢水平飞行时,离开交点坐标且看不到航行信号灯的光线时,即为检验合格;否则调整航行信号灯的角度,直至合格为止。
30.本发明的建船舶的具体位置是在倾斜船台,船台的斜度为1:20。
31.以上所述仅是本本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1