一种基于LoRa的可定位便携式幽门螺旋杆菌检测仪
一种基于lora的可定位便携式幽门螺旋杆菌检测仪
技术领域
1.本发明涉及利用lora通信模块的低功耗和长远距离通信特性,通过极大似然-梯度法实现一种可拆卸便携式幽门螺旋杆菌检测仪的设计。涉及到电子信息、物联网、计算机软件、通信与网络和算法研究等领域。
背景技术:
2.无线网络是由大量的微型传感器节点和基站通信模块构成的自组网络,二者可以将检测数据和定位等信息上传至较大的基站或云端。该类应用有许多,如环境中山林土壤空气中的温湿度检测的应用,家庭用水指标和电量及煤气浓度的检测应用以及医学中病人检测应用等。应用过程中,须将传感器和基站的位置和检测数据相结合,才能更为有效的实现应用的价值。因此如何定位通信模块是无线网络信息传递的重要一环。如在硬件控制系统中嵌入中国北斗卫星导航系统(beidou navigation satellite system,bds)模块或全球卫星定位系统(globalpositioning system,gps)模块,这些模块均有强大的定位和数据交互功能,尽管如此,其所带来的高功耗和成本亦会很高,将其嵌入到大型无线网络的各个通信模块中显然是不适合的。
3.c13/c14/c15呼吸检测是使用频率较高的一种临床生化检查,其原理是将核素 c13/c14/c15标记的尿素酶以口服的方式进入到人体,其到达胃以后,只会与幽门螺旋杆菌结合,形成含有c13/c14/c15的二氧化碳,再通过呼吸排出体外,因此通过气体浓度检测仪检测含有c13/c14/c15的二氧化碳的浓度是无创检测的金标准,现有的检测装置和技术已经非常成熟,但这些检测装置主要购置和存留在医疗机构内,由医务人员进行采样和检测。
4.现有的幽门螺旋杆菌检测需要到医疗机构内才能够进行,病人无法自主的检测和动态观测自身幽门螺旋杆菌的含量,无法常态化监测幽门螺旋杆菌,阻碍了预防和控制胃部疾病。当医疗机构出具检测结果后,也无法实现医生和病人间在任意时间和地点进行无缝对接,医生对病人进行回访过程冗杂,长期监测和控制效率极低,医生不能针对具体感染及胃病发展情况给定具体治疗方案。另外,流行病学研究方面,现有的检测和回访过程也不利于病人的病情监控、家族性和区域性病人病症信息收集,无法促进该病菌所导致的一系列病症的防护改进和研究。
5.此外,各种便携式仪器显示和功能操作软件开发亦是当前智能化的热点,需要设计一种能够通过编程控制硬件控制板的可编程cpu芯片,实现幽门螺旋杆菌监测数据与显示和各种相应功能操作的对接,弥补现有检测装置智能化方面的空白。
附图说明
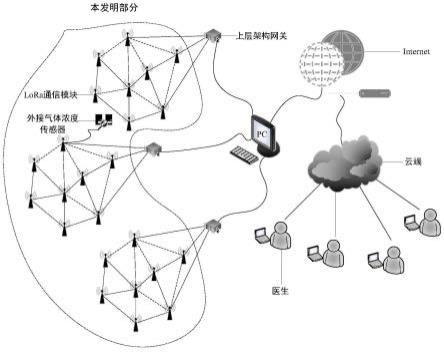
6.图1本发明基于lora可定位检测仪无线网络架构图;
7.图2本发明技术方案设计;
8.图3基于lora可定位便携式幽门螺旋杆菌检测仪整体设计方案;
9.图4un节点初始情况判定流程图;
10.图5本发明极大似然-梯度法的整体执行流程;其中,ε是很小的正数,可以设定ε=1e-8
。
技术实现要素:
11.本发明所要解决的技术问题:1、本发明在结构组成方面,其可拆卸便携式结构特点,使得幽门螺旋杆菌的检测更加便民,避免医院就诊的长时间排队情况的发生;
12.2、本发明在检测仪主体的硬件控制板设计方面,通过可编程芯片、蜂鸣器及存储器使得病人在幽门螺旋杆菌检测、观察及预警等方面的操控更为便捷,可促使民众在该病菌的检测方面常态化,对预防和控制胃部疾病有较大的意义;
13.3、本发明在硬件控制板的lora通信模块设计方面,通过极大使然-梯度法使得外接 c13/c14/c15气体浓度传感器的lora通信模块的定位更为精确,使得处于无线网络上层架的网关便捷和精确的获得具体某位病人的幽门螺旋杆菌检测数据;
14.4、本发明lora定位理念方面,将每个lora通信模块与具体病人绑定,实现病人和医生间随时随地的交互。医生可具体定位到某位病人的病菌检测、观测等,有助于医生针对具体情况给定具体治疗方案。此外,定位所形成的具体某位病人病情的上传,可随时随地的为医疗结构以及科研机构提供病人信息,为家族性和区域性幽门螺旋杆菌的演变趋势提供可靠证据,促进该病菌的治疗和防护方案的改进。
15.为解决上述技术问题,本发明提供以下的技术方案:
16.一种基于lora的可定位便携式幽门螺旋杆菌检测仪,由一次性可拆卸接口、检测仪主体和一次性可拆卸气囊组成,所述检测仪主体内嵌入有硬件控制板,所述硬件控制板电性连接有可编程cpu芯片、蜂鸣器、数据存储器、lora通信模块、c13/c14/c15气体浓度传感器和功能显示屏;所述硬件控制面板通过编程控制可编程cpu芯片实现c13/c14/c15气体浓度传感器和功能显示屏中各功能的对接;所述硬件控制面板通过通过编程控制cpu芯片实现 lora通信模块对病人具体位置的定位,所述编程的算法设计采用极大似然-梯度法。
17.优选地,所述极大似然-梯度法包括:初始判定后利用极大似然获取初值坐标;采用梯度法步长迭代搜索思想对初值坐标进行精度优化,确定病人定位位置。
18.优选地,所述初始判定方法为:un节点初始判定中的关键判断为其周围是否存在三个及以上的kn节点,如果存在,则采用极大似然估计获取其初值位置的坐标。如果不存在,则判断其周围是否有大于等于一小于三个的kn节点,如果是,则将离un节点最近的kn节点坐标作为该un节点的初值坐标;如果该un节点周围没有kn节点,则在其周围增加假定kn节点,通过该un节点和多个假定kn节点间的调和平均后再次利用极大似然估计所确定的中心位置坐标作为该un节点的初值坐标。
19.优选地,所述极大似然获取初值的方法为:un节点需依托kn节点进行初级估计运算,获得未知位置节点的坐标初值为
20.优选地,所述梯度法的优化公式如下:
[0021][0022]
其中,k代表第k次迭代,初始值为k=0,δk为步长。
[0023]
令则在xk处沿方向γk做一维搜索可得步长为:
[0024]
δk=arg minf(xk+δkγk)
[0025]
将极大似然估计获得的粗略初值通过梯度法的方向搜索迭代进一步更新un节点的位置坐标,进而获得的un节点位置信息更贴近于真实位置。
[0026]
本发明获得的有益效果:
[0027]
①
将幽门螺旋杆菌的复杂检测流程和仪器通过结构重组的方式划分为三个部分,即一次性可拆卸接口、检测仪主体及一次性可拆卸气囊,使冗杂的检测流程和仪器变为手握便携式仪器;
[0028]
②
检测仪主体的硬件控制板设计中,通过编程实现病人在幽门螺旋杆菌的检测、数据对比及状态跟踪等功能和
①
中三部分的接密性检查;
[0029]
③
通过外接c13/c14/c15气体浓度传感器、蜂鸣器及数据存储等核心组件,实现以病人的对自身病情的监控的同时,为病情数据在无线网络中上层架构的上传提供参考储备;
[0030]
④
通过极大似然-梯度法实现lora通信模块的精确定位,实现医生和具体某位病人的全方位交互。
具体实施方式
[0031]
下面通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,以帮助本领域的技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
[0032]
实施例1:
[0033]
对于本发明,可在其上层架构(如网关)的定位中少量采用以上定位系统,并作为已知位置节点,即病人幽门螺旋杆菌检测数据和状态观测以及定位信息的汇聚节点,以获得精准的定位和数据交互。本发明的所嵌入的lora模块(包含其外接的c13/c14/c15气体浓度传感器) 作为未知节点,之后通过极大似然-梯度法定位由检测仪或病人所形成的未知节点位置,以便实现较为精确的信息交互功能。如图1所示。
[0034]
本发明以结构划分的方式,将冗长的幽门螺旋杆菌检测过程划分为检测仪的三个组成部分,即一次性可拆卸接口、检测仪主体及一次性可拆卸气囊;设计检测仪主体中硬件控制板,嵌入可编程cpu芯片、蜂鸣器、数据存储器、lora通信模块及外接c13/c14/c15气体浓度传感器和显示屏形成了一套可拆卸的便携式流程,其核心部分为检测仪主体,通过硬件控制板嵌入各种硬件组件和逻辑编程实现检测仪的可检测、报警、存储及显示等功能,如图3所示。同时,本发明还通过可编程cpu芯片控制lora通信模块实现检测仪的可定位功能,其整体技术方案如图2所示,编程设计cpu芯片,实现显示屏上各功能键和c13/c14/c15气体浓度传感器采集数据的对接。
[0035]
算法设计,利用极大似然-梯度法实现lora通信模块的精确定位,并通过编程实现cpu 芯片与lora通信模块的对接;本发明基于lora通信模块定位的核心算法为极大似然-梯度法,具体实施如下所示。
[0036]
如图1所示,在无线网络中为了更为精准的获取需在上层架构(网关)中少量的采用bds 或gps定位系统,作为已知位置节点(known location node,kn),然而底层架构中各
个定位节点均是未知位置节点(unknownlocationnode,un),本发明以lora通信模块为核心定位组件的幽门螺旋杆菌检测仪即为无线网络中的各个未知位置节点。采用极大似然时,un节点需依托kn节点进行初级估计运算,方可获得较为精准的初值。
[0037]
假设无线网络空间中存在的某个un节点,坐标为(x,y),在该点周围,通信半径为r的范围内,存在l个kn节点,坐标分别为(xa,ya),(xb,yb),
…
,(x
l
,y
l
)。假定利用rssi(receivedsignalstrengthindication)法获得该未知位置节点至l个kn节点间的距离为da,db,
…
,d
l
。进而,利用极大似然估计可得该未知位置节点与l个kn节点间存在的一组方程组为:
[0038][0039]
从第l个方程组开始,将相邻两个方程相减,可得一组新的方程组为:
[0040][0041]
显然,式(2)可形成一个线性矩阵的形式为:
[0042][0043]
则利用最小二乘法可得该未知位置节点的坐标初值为
[0044][0045]
例如,该未知位置节点通信半径为r的周围存在三个kn节点,则该未知位置节点的坐标为:
[0046][0047]
以上情况为理想状态下无线网络中底层架构未知位置节点坐标初值的获取方式,在本发明所对应的底层架构中,由于病人的定位具有随机性,其绑定的lora通信节点也以随机的方式部署,因此,每个un节点周围都存在三个及以上kn节点的情况就很难满足。因此,本发明在采用极大似然估计之前应进行初始判定,如图4所示。
[0048]
显然,图4所示的un节点初始判定中的关键判断为其周围是否存在三个及以上的kn节点,如果存在,则采用极大似然估计获取其初值位置的坐标。如果不存在,则判断其周围是否有大于等于一小于三个的kn节点,如果是,则将离un节点最近的kn节点坐标作为该un节点的初值坐标。如果该un节点周围没有kn节点,则在其周围增加假定kn节点,通过该un节点和多个假定kn节点间的调和平均后再次利用极大似然估计所确定的中心位置坐标作为该un节点的初值坐标。
[0049]
综上所述,本发明通过极大然估计可获得un节点较好的初值坐标,然而该坐标虽然是最小二乘的唯一解,但并不一定是真实的un节点坐标,为使计算所得的坐标更加接近
于真实位置,本发明进一步采用梯度法步长迭代搜索思想对初值坐标进行精度优化。
[0050]
梯度法的优化公式如下:
[0051][0052]
其中,k代表第k次迭代,初始值为k=0,δk为步长。
[0053]
令则在xk处沿方向γk做一维搜索可得步长为:
[0054]
δk=argminf(xk+δkγk)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0055]
因此,本发明的极大似然-梯度法的执行目的为将极大似然估计获得的粗略初值通过梯度法的方向搜索迭代进一步更新un节点的位置坐标,使其得到更好的优化,进而获得的un 节点位置信息更贴近于真实位置,提高医生和病人间信息交互的体验性和高效性,其整体执行流程如图5所示。
[0056]
以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内;本发明未涉及的技术均可通过现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1