AR模组测试系统和方法与流程
本发明涉及光学测量,尤其涉及一ar模组测试系统和方法。
背景技术:
1、ar类产品目前广泛应用于军工、工程设计、消费电子和医疗等领域,并随着技术的发展逐渐应用于各种穿戴设备。
2、虚像距是衡量ar设备性能的重要指标之一,ar设备的显示模组、光机及镜片结构的相对组装精度是决定ar成像效果的关键因素,由于ar设备的显示模组、光机及镜片 自身及装配的公差都会引起虚像距的误差,会导致使用者出现视觉疲劳等现象,从而影 响使用者对ar产品的使用体验。针对ar产品虚像距进行测量可以大幅度提升其出厂质 量。目前在ar产品的生产制造过程中,尚没有能够对ar成像系统的虚像距进行有效测 试的方法及装置,如此则会极大影响ar产品的出厂质量
3、现有的测量系统进行通用测试时通过结构设计与光学设计来保障系统偏心与tilt尽量 在一个理想范围内,但是修正程度有限且修正成本很高。测量虚像距时采用实际场景进 行虚像距标定,受空间限制,标定量程有限,如果加大量程则标定精度会大幅降低。
技术实现思路
1、本发明的一个主要优势在于提供一ar模组测试系统和方法,其中所述ar模组测试系统在明确测量系统自身像差的前提下,在测试时进行补偿,以更精确地测量出ar产品 的虚像距。
2、本发明的另一个优势在于提供一ar模组测试系统和方法,其中所述ar模组测试系统在明确测量系统自身场曲&像散的前提下,在测试时进行补偿,以更精确地测量出ar 产品的虚像距。
3、本发明的另一个优势在于提供一ar模组测试系统和方法,其中通过预先标定得到了 理想的光学系统,获取了测量系统自身的场曲&像散信息,用于后续对测试结果进行修正。
4、本发明的另一个优势在于提供一ar模组测试系统和方法,其中所述ar模组测试方法中,先通过标定所述ar模组测试系统,得到所述测试系统的函数关系式,通过所述函 数关系式测量所述ar模组的成像质量,相比于表格查找结果更加准确。
5、本发明的另一个优势在于提供一ar模组测试系统和方法,其中所述ar模组测试系统的量程更大,但所述测试系统没有占用更大体积,有利于设备小型化。
6、本发明的另一个优势在于提供一ar模组测试系统和方法,其中本发明提供的所述ar 模组测试系统和方法不需要昂贵的机械设备也不需要复杂的机械结构。因此,本发明成功地提供了一种经济有效的解决方案。
7、依本发明的一个方面,能够实现前述目的和其他目的和优势的本发明的一ar模组测 试系统,包括:
8、一接收器;
9、一成像镜头,其中所述成像镜头位于所述接收器的前端,以供所述接收器通过所述 成像镜头拍摄一测试区域内的图像信息;
10、一数据处理装置,其中所述数据处理装置与所述接收器相通信地连接;以及
11、一可调平台,其中所述接收器被设置于所述可调平台,由所述可调平台驱动所述接 收器移动,并获取所述测试区域成像最清晰位置相对于中心视场成像最清晰位置的偏差, 其中所述偏差即为测试所用各个区域的系统场曲信息,根据获取的所述系统场曲信息对 离焦曲线修正,和评价所述ar模组的成像质量。
12、根据本发明的一个实施例,进一步设有至少一被测端位,其中所述被测端位适于安装 待测的所述ar模组。
13、根据本发明的一个实施例,所述可调平台具有五个方向的自由度,即沿x轴平移、沿y轴平移、沿z轴平移、绕x轴旋转以及绕y轴旋转。
14、根据本发明的一个实施例,其中所述可调平台包括一平台主体被设置于所述平台主 体的一电机,二平移传动轴以及二旋转传动轴,其中所述二平移传动轴和所述二旋转传动轴被可传动地连接所述电机于所述接收器,由所述平移传动轴带动所述接收器沿x轴 平移和/或沿y轴平移,由所述电机带动所述接收器沿z轴平移,通过所述旋转传动轴带 动所述接收器绕x轴旋转和/或y轴旋转。
15、根据本发明的一个实施例,所述成像镜头端面到虚像的距离即虚像距为d1,所述可 调平台带动所述接收器移动的距离为d2,所述接收器对焦面到所述成像镜头端面的距离 为d3,系统成像公式为:
16、
17、其中d3-d2为测试过程中成像镜头端面至接收器对焦面的距离即像距;d1为本系统 中的虚像距即物距;f'为镜头参与计算的焦距。
18、根据本发明的一个实施例,通过对所述ar模组测试系统的标定获取d1&d2的数据,再基于获取的多组d1&d2的数据可求出参数d3与f',从而获得标定关系式,结合标定 所得的函数关系,确定待测产品虚像距d1。
19、根据本发明的另一方面,本发明提供一ar模组测试方法,包括:
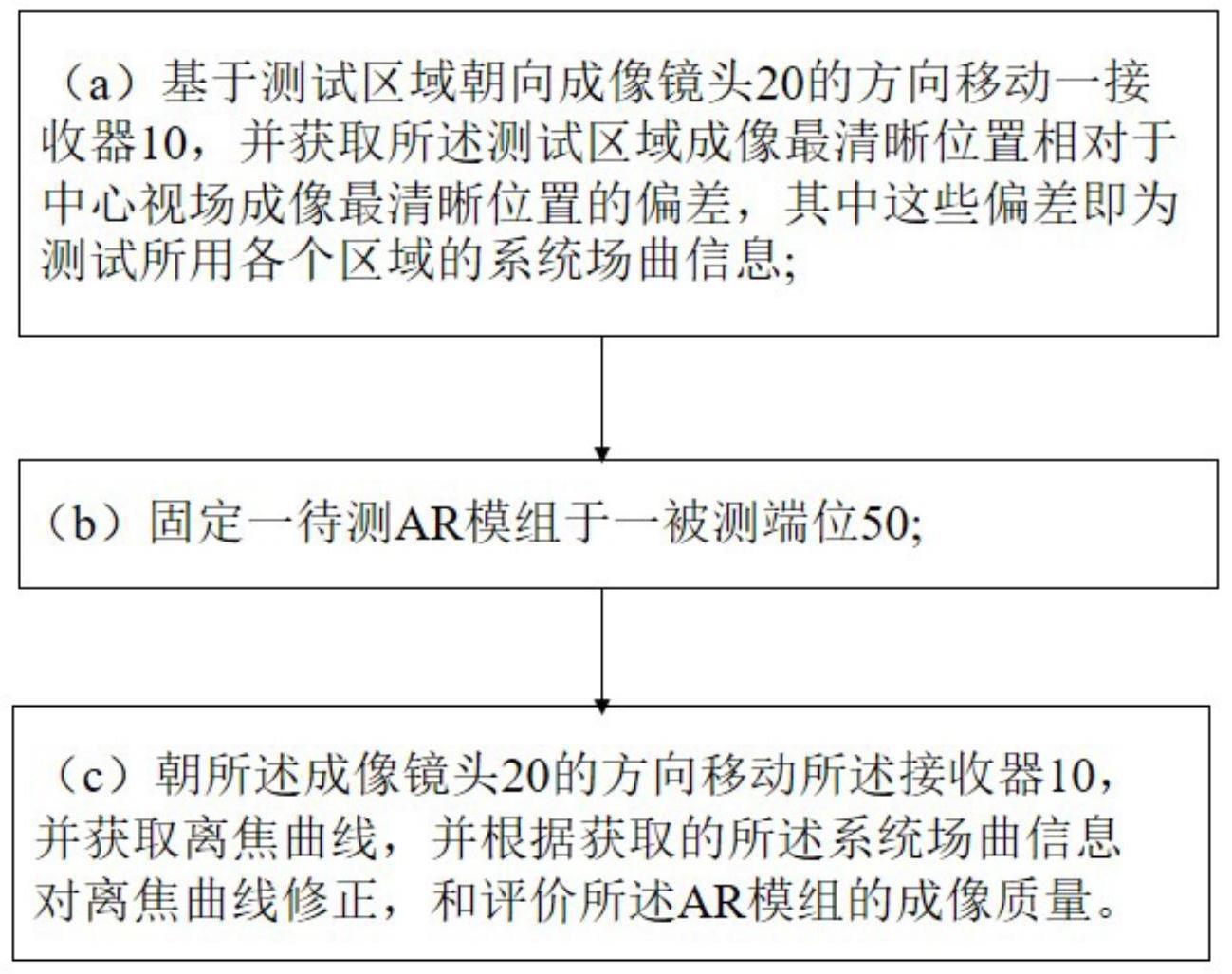
20、(a)基于测试区域朝向成像镜头的方向移动一接收器,并获取所述测试区域成像最 清晰位置相对于中心视场成像最清晰位置的偏差,其中这些偏差即为测试所用各个区域 的系统场曲信息;
21、(b)固定一待测ar模组于一被测端位;以及
22、(c)朝所述成像镜头的方向移动所述接收器,并获取离焦曲线,并根据获取的所述系统场曲信息对离焦曲线修正,和评价所述ar模组的成像质量。
23、根据本发明的一个实施例,步骤(a)为对ar模组测试系统的标定过程,其中所述步骤(a)进一步包括:
24、(a.1)偏心修正的过程,通过调整接收器相对于成像镜头沿x轴和y轴平移,直至系统偏心在允许的范围;
25、(a.2)tilt修正的过程,通过调整系统机械结构,使得接收器相对于成像镜头进行绕 x轴旋转与绕y轴旋转,以进行系统tilt的修正;以及
26、(a.3)场曲获取的过程,交替地进行步骤(a.1)和步骤(a.2),以至偏心与tilt均在误差范围内,得到最终理想的系统机械结构。
27、根据本发明的一个实施例,所述步骤(a.1)进一步包括:
28、(a.1.1)将一均匀面光源放置于所述成像镜头的镜头端面并紧贴;
29、(a.1.2)获取当前测试图像,并计算测试图像光心与图像几何中心在竖直和水平方向 的差值;以及
30、(a.1.3)实时调整系统机械结构使得接收器相对于成像镜头沿x轴和y轴平移,直至 系统偏心在允许的范围。
31、根据本发明的一个实施例,所述步骤(a.2)进一步包括:
32、(a.2.1)将线对标板放置于所述被测端位;
33、(a.2.2)沿z方向等间隔地移动所述接收器并对线对标板进行拍摄,并获取中心视场 和中心视场外的多个视场水平和竖直方向最清晰的图片对应的电机位置;以及
34、(a.2.3)基于各视场成像最清晰时电机位置的差值调整系统机械结构,使得接收器相 对于成像镜头进行u&v方向的摆动,以进行系统tilt修正。
35、根据本发明的一个实施例,在所述步骤(a.2.2)中,沿z方向等间隔地移动所述接收 器,获取0视场和0.6视场水平和竖直方向最清晰的图片对应的电机位置,并得到多条离焦曲线。
36、根据本发明的一个实施例,在所述步骤(a.2.2)中通过ctf获取所拍摄图像各个视场成像最清晰时对应的电机位置,并求出四个0.6视场与0视场成像最清晰时电机位置的差值,记为差值a、差值b、差值c、差值d,并以此四个差值为依据调整系统机械结构。
37、根据本发明的一个实施例,所述步骤(a.3)进一步包括:
38、在上述ar模组测试方法中,其中在所述ar模组测试系统的成像公式为:
39、
40、其中d3-d2为测试过程中成像镜头端面至接收器对焦面的距离即像距;d1为本系统 中的虚像距即物距;f'为镜头参与计算的焦距。通过对所述ar模组测试系统的标定获取d1&d2的数据,再基于获取的多组d1&d2的数据可求出参数d3与f',从而获得标定 关系式,即虚像距d1与成像最佳电机位置d2对应的函数关系。
41、根据本发明的一个实施例,所述步骤(c)进一步包括:
42、获取待测产品对应的成像质量最佳电机位置d2,结合所述测试系统的成像公式,以 确定待测产品虚像距d1。
43、根据本发明的一个实施例,所述ar模组测试方法的所述步骤(a)进一步包括步骤:(a.4)虚像距标定的过程,以不等间隔地选取多个平行光管成像物距,并获取多组不同 的平行光管成像物距与该物距下成像最清晰时的电机位置的数据。
44、根据本发明的一个实施例,所述ar模组测试方法在2m-20m物距范围获取32组不同的平行光管成像物距与该物距下成像最清晰时的电机位置的数据。
45、根据本发明的一个实施例,所述步骤(a.4)进一步包括:
46、(a.4.1)固定一平行光管于所述被测端位处;
47、(a.4.2)沿z方向按照第一预设步长等间隔移动所述接收器,并对chart进行拍摄,获取第一预设步长下成像最清晰时的电机位置;
48、(a.4.3)定位至第一预设步长下成像最清晰位置前方三个步长处,并以第二预设步长 进行标定,其中在第二预设步长下当离焦所得清晰度差于起始位置清晰度时,停止标定。
49、根据本发明的一个实施例,在所述步骤(a.4.3)中,当以第一预设步长离焦所得清晰 度连续下降五个步长时停止标定。
50、通过对随后的描述和附图的理解,本发明进一步的目的和优势将得以充分体现。
51、本发明的这些和其它目的、特点和优势,通过下述的详细说明和附图得以充分体现。
- 还没有人留言评论。精彩留言会获得点赞!