1.本发明属激光陀螺技术领域,尤其涉及一种加速度环境下激光陀螺敏感轴向偏差开环控制装置及方法。
背景技术:2.激光惯性导航系统是基于激光陀螺的现代化高性能惯性导航系统,广泛用于运载火箭、卫星飞船、导弹武器、航空飞机、潜艇舰船等领域。
3.惯性导航系统内部通常安装有三只激光陀螺和三只加速度计。激光陀螺是导航系统的关键仪表,用来测量角速度和角度,具有精度高、可靠性好、寿命长等特点。
4.在运载火箭、导弹武器、战机等在大加速度环境下,激光陀螺在平行于光路的两个方向,具有很高的刚度,激光陀螺谐振腔产生很小的形变,陀螺的输出偏置误差很小,通常只有每小时千分之度。
5.然而当在激光陀螺纵向z轴(敏感轴)上的加速度时,由于该方向刚度较小,导致激光陀螺谐振腔产生变形,从而使激光光路形变,产生了显著的偏置误差。对z轴方向40g的加速度,常规尺寸的激光陀螺来说加速度引起的偏置误差通常在0.05~0.3deg/h,这个误差通常是小加速度环境下误差(通常优于0.01deg/h)的数倍。因此在z轴大加速度环境下,加速度导致的激光陀螺偏置误差必须得到抑制。
6.现有的专利和文献并在涉及对大加速度下陀螺误差问题的解决,通常只有采用更小尺寸的激光陀螺、加大激光陀螺厚度,或者标定出仪表对加速度的敏感度进行补偿等方法。但是这些方法都显著存在问题:(1)小尺寸激光陀螺静态精度往往比大尺寸激光陀螺要低得多,难以达到静态下的高精度要求。
7.(2)采用加大厚度的激光陀螺,往往显著增加了仪表体积重量,通常体积和重量会增大20~40%,这往往不能接受;(3)要标定出陀螺对加速度的敏感,需要复杂昂贵的离心机进行长时间标定,且每只陀螺敏感度和极性都不相同,误差分辨率也不高,这种方法效率很低、成本极高。
8.因此,现有措施和方法不能适应高精度激光陀螺在大过载下的精度保持要求。不能确保激光陀螺大过载环境下精度性能的稳定。
技术实现要素:9.为解决上述技术问题,本发明的第一方面提出了一种加速度环境下激光陀螺敏感轴向偏差开环控制装置,所述装置包括:惯导系统加速度计、电形变装置和转换器;所述惯导系统加速度计用于检测所述激光陀螺在敏感轴向上的实时加速度的方向及加速度值,并将所述加速度的方向及加速度值提供给所述转换器;在激光陀螺的上表面和下表面上均固定了电形变装置;所述转换器根据所述实时加速度的方向及加速度值生成控制所述电形变装置的
矫正电压,所述矫正电压使得所述电形变装置产生弯曲形变,所述弯曲形变用于抵消加速度引起的激光陀螺的形变。
10.如本发明的第一方面所述的控制装置,所述电形变装置为压电陶瓷片,所述压电陶瓷片粘接在所述激光陀螺的上表面和下表面上。
11.如本发明的第一方面所述的控制装置,所述转换器的输出电压范围为:0-300v,该电压用于驱动电形变装置产生弯曲形变,以使得激光陀螺产生形变。
12.如本发明的第一方面所述的控制装置,所述转换器的基准输出电压为150v;当所述转换器输出基准输出电压时,所述激光陀螺的上表面和下表面的电形变装置的形变互相抵消;如果所述实时加速度为正值,所述转换器输出第一矫正电压v
h1
,停止输出所述基准输出电压;所述转换器输出第一矫正电压v
h1
时,电形变装置使得所述激光陀螺的上表面向下弯曲形变;如果所述实时加速度为负值,所述转换器输出第二矫正电压v
h2
,停止输出所述基准输出电压;所述转换器输出第二矫正电压v
h1
时,电形变装置使得所述激光陀螺的下表面产生向上弯曲形变。
13.如本发明的第一方面所述的控制装置,所述第一矫正电压的范围是:0≤v
h1
<150v;所述第二矫正电压的范围是: 150v<v
h2
≤300v;所述电形变装置产生的弯曲形变量范围为:3纳米到5微米之间。
14.如本发明的第一方面所述的控制装置,所述电形变装置为压电陶瓷片,所述压电陶瓷片的形变幅度与施加的所述第一矫正电压或第二矫正电压偏离基准输出电压的幅值大小成正比。。
15.如本发明的第一方面所述的控制装置,当实时加速度大于预定阈值时,所述转换器的输出电压按如下规律变化:当实时加速度幅值越大,所述转换器输出的电压值偏离150v的量值越大,所述压电陶瓷片所产生的形变越大。
16.如本发明的第一方面所述的控制装置,所述压电陶瓷片被制成长条状薄陶瓷片,所述长条状薄陶瓷片在激光陀螺的上表面及下表面按中心对称的方式排列,并使用环氧胶粘接在激光陀螺的上表面及下表面。
17.本发明的第二方面提出一种加速度环境下激光陀螺敏感轴向偏差开环控制方法,所述方法包括以下步骤:步骤1,所述激光陀螺进入工作状态后,使用惯导系统加速度计检测所述激光陀螺在敏感轴向上的实时加速度的方向与加速度值;步骤2,当所述激光陀螺在敏感轴向上的加速度值小于预定阈值,所述转换器输出基准输出电压,此时所述激光陀螺在敏感轴向上不产生弯曲形变;所述基准输出电压为:150v;或者,如果所述惯导系统加速度计检测到所述激光陀螺在敏感轴向上的实时加速度值大于所述预定阈值时,所述转换器输出矫正电压,所述矫正电压的幅度为:0-300v,以矫正所述激光陀螺谐振腔的弯曲形变。
18.如本发明第二方面所述的方法,所述步骤2包括:如果所述惯导系统加速度计检测到所述激光陀螺在敏感轴向上的实时加速度值大于所述预定阈值,并且实时加速度的方向为正,则所述转换器输出第一矫正电压,以使激光陀螺的上表面产生向下弯曲形变;如果所述惯导系统加速度计检测到所述激光陀螺在敏感轴向上的实时加速度值大于所述预定阈值,并且实时加速度的方向为负,则所述转换器输出第二矫正电压,以使激光陀螺的下表面产生向上弯曲形变。
19.采用本发明的技术方案,(1)本方法控制方法简单,容易实现,控制电路只需要非常简单的硬件支撑。
20.(2)本发明方法高度灵敏、控制范围大,能够确保在-80g~80g加速度下,陀螺输出的高度稳定;(3)本发明非常廉价和实用,能够保持陀螺仪在加速度环境下的精度,改善导弹武器命中精度,提高飞机导航定位精度。
附图说明
21.图1为本发明激光陀螺的示意图;图2为本发明的控制示意图;图3为本发明控制流程图。
22.其中,1.激光陀螺谐振腔,2.激光功率输出镜,3.激光功率计,4.激光反射镜。
具体实施方式
23.本发明的技术解决问题是:克服现有方法措施的缺点,提供一种廉价、简单、实时灵敏的控制方法,极大减小加速度导致的激光陀螺偏置误差。本发明设计了一种激光陀螺在大加速度环境下稳定控制的方案,适用于确保激光陀螺大过载环境下精度性能的稳定。
24.本发明提出根据惯导系统加速度计的加速度信息,控制激光陀螺谐振腔1的形变,确保激光陀螺谐振腔1的弯曲在可接受的范围内,从而消除加速度环境下的偏置误差的方法。
25.激光陀螺敏感轴存在加速度时,激光陀螺谐振腔1表面产生3纳米到5微米的弯曲形变,形变越大,陀螺输出的偏置误差也越大。如果希望消除这种弯曲形变,可以通过对粘贴在激光陀螺谐振腔1上下表面上的形变装置(如压电陶瓷)分别施加矫正电压,使得电形变装置产生相反的形变来抵消加速度造成的形变。
26.以下结合附图对本发明的具体实施方式作出详细说明。
27.激光陀螺装入惯性导航系统后,三只激光陀螺通常是正交安装的,三只惯导系统加速度计通常是正交安装的,而且激光陀螺和惯导系统加速度计的正交坐标系往往是重合的,这有利于简化控制信息的处理。
28.激光陀螺的基本构造如附图1所示,所述激光陀螺包括如下四个部件:激光陀螺谐振腔1、激光功率输出镜2、激光功率计3和激光反射镜4。
29.如图2所示,本发明的第一方面提出了一种加速度环境下激光陀螺敏感轴向偏差开环控制装置,所述装置包括:惯导系统加速度计、电形变装置和转换器;
所述惯导系统加速度计用于检测所述激光陀螺在敏感轴向上的实时加速度的方向及加速度值,并将所述加速度的方向及加速度值提供给所述转换器;在激光陀螺的上表面和下表面上均固定了电形变装置;所述转换器根据所述实时加速度的方向及加速度值生成控制所述电形变装置的矫正电压,所述矫正电压使得所述电形变装置产生弯曲形变,所述弯曲形变用于抵消加速度引起的激光陀螺的形变。
30.在常用的惯性导航系统内部一般安装有三只激光陀螺和三只惯导系统加速度计,通常三只激光陀螺相互间是正交安装的,三只惯导系统加速度计相互间也是正交安装的,而且激光陀螺和惯导系统加速度计的正交坐标系是重合的,因而可以使用位于指定多个激光陀螺的z轴方向(敏感轴向)的惯导系统加速度计来检测激光陀螺敏感轴向的加速度,惯导系统加速度计的检输出输入到转换器变换为控制电形变装置的电压。如本发明的第一方面所述的控制装置,所述电形变装置为压电陶瓷片,所述压电陶瓷片粘接在所述激光陀螺的上表面和下表面上。
31.如本发明的第一方面所述的控制装置,所述转换器的输出电压范围为:0-300v,该电压用于驱动电形变装置产生弯曲形变,以使得激光陀螺产生形变。
32.如本发明的第一方面所述的控制装置,所述转换器的基准输出电压为150v;当所述转换器输出基准输出电压时,所述激光陀螺的上表面和下表面的电形变装置的形变互相抵消;如果所述实时加速度为正值,所述转换器输出第一矫正电压v
h1
,停止输出所述基准输出电压;所述转换器输出第一矫正电压v
h1
时,电形变装置使得所述激光陀螺的上表面向下弯曲形变;如果所述实时加速度为负值,所述转换器输出第二矫正电压v
h2
,停止输出所述基准输出电压;所述转换器输出第二矫正电压v
h1
时,电形变装置使得所述激光陀螺的下表面产生向上弯曲形变。
33.如本发明的第一方面所述的控制装置,所述第一矫正电压的范围是:0≤v
h1
<150v;所述第二矫正电压的范围是: 150v<v
h2
≤300v;所述电形变装置产生的弯曲形变量范围为:3纳米到5微米之间。
34.如本发明的第一方面所述的控制装置,所述电形变装置为压电陶瓷片,所述压电陶瓷片的形变幅度与施加的所述第一矫正电压或第二矫正电压偏离基准输出电压的幅值大小成正比。
35.如本发明的第一方面所述的控制装置,当实时加速度值大于预定阈值时,所述转换器的输出电压按如下规律变化:当实时加速度幅值越大,所述转换器输出的电压值偏离150v的量值越大,所述压电陶瓷片所产生的形变越大。
36.如本发明的第一方面所述的控制装置,所述压电陶瓷片被制成长条状薄陶瓷片,所述长条状薄陶瓷片在激光陀螺的上表面及下表面按中心对称的方式排列,并使用环氧胶粘接在激光陀螺的上表面及下表面。
37.单个激光陀螺的控制流程图如图3所示。该控制流程由下述方法步骤做出清楚描
述。
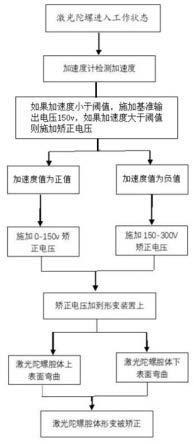
38.本发明的第二方面提出一种加速度环境下激光陀螺敏感轴向偏差开环控制方法,所述方法包括以下步骤:步骤1,所述激光陀螺进入工作状态后,使用惯导系统加速度计检测所述激光陀螺在敏感轴向上的实时加速度的方向与加速度值;步骤2,当所述激光陀螺在敏感轴向上的加速度值小于预定阈值,所述转换器输出基准输出电压,此时所述激光陀螺在敏感轴向上不产生弯曲形变;所述基准输出电压为:150v;或者,如果所述惯导系统加速度计检测到所述激光陀螺在敏感轴向上的实时加速度值大于所述预定阈值时,所述转换器输出矫正电压,所述矫正电压的幅度为:0-300v,以矫正所述激光陀螺谐振腔1的弯曲形变。
39.如本发明第二方面所述的方法,所述步骤2进一步包括:如果所述惯导系统加速度计检测到所述激光陀螺在敏感轴向上的实时加速度大于所述预定阈值,并且实时加速度的方向为正,则所述转换器输出第一矫正电压,电压范围为:0-150v,通过施加所述电形变装置的矫正电压,使得所述电形变装置产生弯曲形变,从而使激光陀螺的上表面产生向下弯曲形变;如果所述惯导系统加速度计检测到所述激光陀螺在敏感轴向上的实时加速度值大于所述预定阈值,并且实时加速度的方向为负,则所述转换器输出第二矫正电压,电压范围为:150-300v,通过施加所述电形变装置的矫正电压,使得所述电形变装置产生弯曲形变,从而使激光陀螺的下表面产生向上弯曲形变。所述弯曲形变用于抵消加速度引起的激光陀螺的形变,使得激光陀螺腔体形变被矫正。
40.最后应说明的是,以上实施方式仅用以说明本发明实施例的技术方案而非限制,尽管参照以上较佳实施方式对本发明实施例进行了详细说明,本领域的普通技术人员应当理解,可以对本发明实施例的技术方案进行修改或等同替换都不应脱离本发明实施例的技术方案的精神和范围。