基于地面云台相机的叶片检测方法与流程
1.本发明属于风机叶片检测技术领域,具体涉及一种基于地面云台相机的叶片检测方法。
背景技术:
2.风力发电机不论在转运、安装还是运行过程中都容易出现损伤。尤其在运行过程中遭遇冰雹、雨雪等天气时损伤风险会急剧增加。出现损伤的叶片如不能及时被发现,损伤将持续加剧,进而导致整个叶片的损毁,严重的还将引起风力发电机机舱故障,失去发电能力。
3.为尽可能早地确定叶片上是否存在损伤,现有技术中常采用人工进行定期查看的方式来实现。即通过受过专业训练的操作人员攀爬至叶片表面进行查看才能确定叶片表面是否存在损伤。采用人工攀爬至叶片表面进行查看的方式确定叶片表面是否存在损伤,需要耗费较长时间以培训操作人员。操作人员在攀爬至叶片上进行查看定损时也会花费较长时间,通常情况下一天只能查看一至两台风机,效率非常低。面对上百台风机的风电场,采用人工的确定方式明显无法满足叶片损伤检测的需求。增加用于检测风机叶片的操作人员尽管能够提高检测速度,但同时也加重了风电场的运营成本。
技术实现要素:
4.为解决上述技术问题,本发明提供一种基于地面云台相机的叶片检测方法。
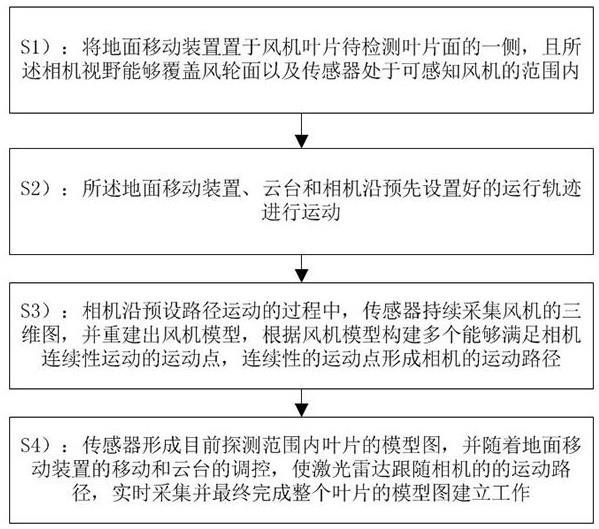
5.具体方案如下:一种基于地面云台相机的叶片检测方法,包括地面移动装置、地面移动装置上设置有云台、云台上设置有相机、云台周边均匀分布设置有传感器,包括如下步骤:s1):将地面移动装置置于风机叶片待检测叶片面的一侧,且所述相机视野能够覆盖风轮面以及传感器处于可感知风机的范围内;s2):所述地面移动装置、云台和相机沿预先设置好的运行轨迹进行运动;s3):相机沿预设路径运动的过程中,传感器持续采集风机的三维图,并重建出风机模型,根据风机模型构建多个能够满足相机连续性运动的运动点,连续性的运动点形成相机的运动路径;s4):传感器形成目前探测范围内叶片的模型图,并随着地面移动装置的移动和云台的调控,使激光雷达跟随相机的的运动路径,实时采集并最终完成整个叶片的模型图建立工作。
6.地面移动装置在预设运动轨迹运动时还通过传感器感知周围是否存在阻碍运动的障碍物,以便在达到预定报警位置或小于设定范围的距离时及时发出报警信息,所述报警信息包括声音信息报警和视觉灯光信息报警。
7.云台控制相机的拍摄视野或焦点沿叶片的一端到另一端进行扫描式拍摄,并通过激光雷达对叶片进行实时扫描建模。
8.传感器进行叶片模型图建立的方法为,m1):设置预设位置区间,所述预设位置区间为传感器探测视野长度的30%-70%之间;m2):调整云台使叶片模型图的一端与预设位置区间的一端间距小于预设距离;m3):在移动的过程中,叶片模型图的一端移动至与预设位置区间一端的间距大于预设距离时,调整云台使传感器的探测视野向缩小间距的方向移动;叶片模型图移动至预设位置区间的另一侧,且间距大于预设距离时,调整云台使传感器的探测视野向缩小间距的方向移动。
9.相机镜头轴线与地面夹角为60度,以使传感器处于能够探测风机的范围内。
10.本发明公开了一种基于地面云台相机的叶片检测方法,仅需将地面移动装置放置在风机叶片的一侧,控制云台和相机沿预设路径运动,通过能够感知空间距离及角度的传感器感知待测叶片位置的参数,从而基于这些参数控制系统的运动轨迹和云台的动作,以确保系统自身能够平稳追踪叶片,最终完成拍摄工作,在地面移动装置移动过程中,还能够实时感知周边环境,确保自身所处环境及路线上的安全,不会碰撞到其他物体。
附图说明
11.图1是本发明的流程图。
具体实施方式
12.下面将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施,而不是全部的实施,基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
13.本实施例旨在提供一种能够高效、便捷、安全的检测方法,进而提高风力发电机的运行效率和寿命。
14.如图1所示,一种基于地面云台相机的叶片检测方法,包括地面移动装置、地面移动装置上设置有云台、云台上设置有相机、云台周边均匀分布设置有传感器,云台用于安装承载相机以及调整相机的运动,地面移动装置能够使得云台按照预设路径运动,所述地面移动装置优选为行走小车。
15.在本实施例中,传感器为用于感知角度和空间距离的传感器,从而使地面移动装置具备获取自身和风机的运行状态、位置和角度变化等运行参数的能力,以便基于这些参数调整地面移动装置自身的运动状态,按照预设路径完成检测工作。
16.本实施例中,设置的传感器一般可以是雷达或其他能够实现上述能力的传感装置,所述雷达优选为激光雷达。由于激光雷达的探测范围要较好,因此在无特殊精度要求时可设置一个激光雷达。该激光雷达的探测范围朝向风机叶片的方向,采用ouster os-1激光雷达,探测范围在0.84-120m。该激光雷达的视场角水平方向为360度,竖直方向为45度,探测视野为2048*32像素点。相机的视场角为15.6度。
17.而且,所述的传感器还可以增加除激光雷达之外的其他装置,如超声波传感器或飞行时间传感器等,构成具备感知角度和空间距离的传感器时,所述传感器的数量一般设
置为3-8个,并均布在云台的周围。
18.每个传感器设备中至少附带一块微处理器,也即是mcu,以构成一个传感器节点sensor node,所述微处理器负责控制该传感器,并将传感器数据打包,加入crc校验,然后通过异步通讯线uart发送给传感器集成模块sensor hub。
19.传感器集成模块也包含一个微处理器,通过异步通讯线负责发送配置命令给每个传感器节点,并接收各个传感器节点发过来的数据,解包并做crc校验,然后通过usb发送给地面移动装置上的控制电脑。
20.所述地面移动装置在地面运行,无需搬运至叶片表面或通过任何飞行器将系统携带至空中。
21.基于地面云台相机的叶片检测方法,包括如下步骤:s1):将地面移动装置置于风机叶片待检测叶片面的一侧,且所述相机视野能够覆盖风轮面以及传感器处于可感知风机的范围内;对叶片前侧进行检测时,地面移动装置放置于叶片前侧,对叶片后侧进行检测时,地面移动装置放置于叶片后侧;s2):所述地面移动装置、云台和相机沿预先设置好的运行轨迹进行运动;s3):相机沿预设路径运动的过程中,传感器持续采集风机的三维图,并重建出风机模型,根据风机模型构建多个能够满足相机连续性运动的运动点,连续性的运动点形成相机的运动路径;s4):传感器形成目前探测范围内叶片的模型图,并随着地面移动装置的移动和云台的调控,使激光雷达跟随相机的的运动路径,实时采集并最终完成整个叶片的模型图建立工作。
22.地面移动装置在预设运动轨迹运动时还通过传感器感知周围是否存在阻碍运动的障碍物,以便在达到预定报警位置或小于设定范围的距离时及时发出报警信息,所述报警信息包括声音信息报警和视觉灯光信息报警。
23.云台控制相机的拍摄视野或焦点沿叶片的一端到另一端进行扫描式拍摄,并通过激光雷达对叶片进行实时扫描建模。
24.传感器进行叶片模型图建立的方法为,m1):设置预设位置区间,所述预设位置区间为传感器探测视野长度的30%-70%之间;m2):调整云台使叶片模型图的一端与预设位置区间的一端间距小于预设距离,预设距离可以根据实际工作情况进行设定;m3):在移动的过程中,叶片模型图的一端移动至与预设位置区间一端的间距大于预设距离时,调整云台使传感器的探测视野向缩小间距的方向移动;叶片模型图移动至预设位置区间的另一侧,且间距大于预设距离时,调整云台使传感器的探测视野向缩小间距的方向移动。
25.在进行检测时,为使传感器处于能够探测风机的范围内,设定相机镜头轴线与地面夹角为60度,进而控制相机的视野焦点沿预设路径运动,以使相机根据所设定的路径拍摄到完整、清晰的叶片图像;所述的基于地面云台相机的叶片检测方法,仅需将地面移动装置放置在风机叶片的一侧,控制云台和相机沿预设路径运动,通过能够感知空间距离及角度的传感器感知待
测叶片位置的参数,从而基于这些参数控制系统的运动轨迹和云台的动作,以确保系统自身能够平稳追踪叶片,最终完成拍摄工作,在地面移动装置移动过程中,还能够实时感知周边环境,确保自身所处环境及路线上的安全,不会碰撞到其他物体。
26.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1