用于集电器的测量装置和用于运行测量装置的方法以及校准设备与流程
本发明涉及一种用于测量至少一个铰接地设置在集电器单元的集电器车辆处的集电器相对于集电器车辆的位置的测量装置,所述测量装置具有至少一个具有至少一个传感器的、在集电器车辆处设置的传感器单元。本发明也涉及一种用于运行根据本发明的测量装置的方法以及一种校准设备。
背景技术:
1、用于滑触导电轨的集电器单元尤其在车间、贮存仓库或物流中心中使用,尤其以便在输送设施、如例如电动悬挂轨道或电动承载轨道中确保消耗器沿着轨道的持久的电流供应。这种集电器单元通常具有一个或多个集电器,所述集电器铰接地设置在集电器车辆处,其中集电器通常具有至少一个集电臂和集电器触点。为了连续地产生消耗器的电流供应,集电器触点在集电器单元的行进期间必须始终与滑触导电轨接触。对此,滑触导电轨必须处于尽可能好的状态中并且具有尽可能均匀的伸展,借此不出现突然的接触中断。突然的接触中断能够引起运行失效从而引起巨大的成本。
2、通过密集的使用,不仅在滑动触点中、而且也在滑触导电轨中出现损耗和磨损,所述损耗和磨损会负面地影响在集电器触点和滑触导电轨之间的连续接触。同样地,事故、安装错误或不适当的使用会引起错误,例如通过滑触导电轨部段或集电器触点的变形或破坏。
3、为了可以尽可能及早地识别和消除这种错误源,力求的是,尽可能在整个长度之上并且尽可能连续地监控对应的设施。对此,存在不同的方式。
4、从de 202 05 710u1中已知集电器单元,其中在集电器处设有运动传感器,所述运动传感器检测集电器的由于在其滑触路径中的不规则性出现的偏移。运动传感器为双轴加速度传感器,所述双轴加速度传感器探测施加到集电器上的加速度或其运动从而其沿两个空间维度的偏移。
5、从de102017008382a1中已知具有加速度传感器的另一集电器单元,其中加速度传感器探测在用电流供应的车辆和滑触导电轨之间出现的间距改变,所述间距改变通过滑触导电轨中的不平坦性产生。如果间距超过规定的公差值,由评估单元发出警报,所述评估单元评估传感器信号并且设置在车辆处。
6、迄今市售的测量装置具有共同的缺点,仅可以相对不准确地监控滑触导电轨的状态。通过限制于一个或两个空间轴线,仅可以不够精确地探测在空间中的复杂的三维运动,所述三维运动如尤其通过集电器触点的旋转和翻转出现。
7、集电器相对于集电器车辆的真实位置可以根据不同的位置参数来描述。适合的位置参数例如能够是集电器的冲程和偏移,其中冲程基本上沿竖直方向发生,而偏移描述集电器在水平平面中的位置。因为偏移和冲程共同地展开三维空间,单轴或双轴传感器不足以描述集电器的真实位置。这在考虑已经提到的翻转和旋转过程的情况下更加适用。迄今使用的单轴或双轴加速度传感器因此仅可以相对粗略地确定集电器的真实位置。
技术实现思路
1、本发明的目的因此至少在于,提供一种测量装置,借助所述测量装置能够以大的精度在设施的整个长度的范围中连续地监控集电器相对于集电器车辆的位置进而每个相应的滑触导电轨的状态。本发明的目的也在于,提供一种用于运行根据本发明的测量装置的方法以及一种校准设备。
2、所述目的中的至少一个目的根据本发明通过具有权利要求1的特征的测量装置通过如下方式来实现,即在至少一个集电器处设置有永磁体,并且至少一个传感器是霍尔传感器,其中测量装置从至少一个霍尔传感器的至少一个传感器信号(x,y,z)中求取每个装配有永磁铁的集电器的位置。
3、所述目的中的至少一个目的根据本发明通过具有权利要求17的特征的用于运行根据本发明的测量装置的方法或通过具有权利要求25的特征的校准设备来实现。
4、借助根据本发明的测量装置,能够以高的精度来诊断对应的设施的滑触状态、检查新安装的或维修的设施的安装质量和连续地监控设施磨损。
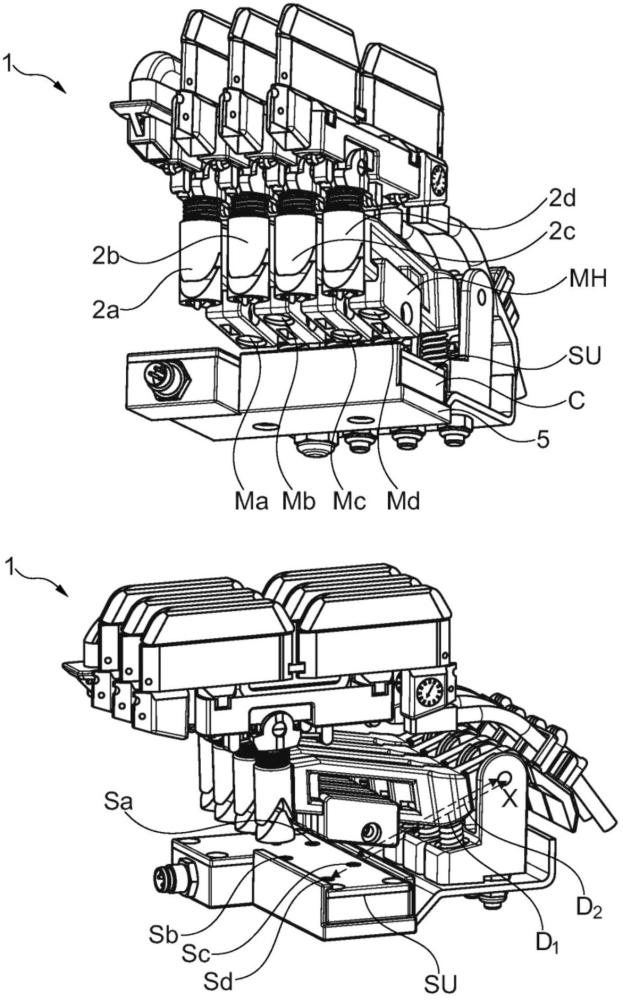
5、传感器单元的至少一个传感器关于铰接设置的集电器位置固定地设置在集电器车辆处。由此可行的是,通过如下方式求取集电器相对于集电器车辆的位置,即传感器探测在集电器处设置的永磁铁的磁场并且测量磁场通过集电器的位置变化感生的局部变化。
6、在根据本发明的测量装置的一个优选的实施方式中,在至少一个、尤其全部集电器处分别设置有至少一个永磁体。在传感器的数量相同的情况下,那么例如每个传感器可以分别求取集电器的位置。当然也可以有利的是,在集电器处设置有多于一个永磁体,例如以便产生特别有利的磁场,或者以便通过两个不同的传感器求取集电器的位置。
7、在根据本发明的测量装置的一个特别优选的实施方式中,至少一个传感器是3d霍尔传感器。那么可行的是,测量装置在全部三个空间方向上求取每个配设有永磁铁的集电器的位置。例如英飞凌tlv493d-a1b6已经证实为是尤其适合的,其也能够探测空间中的复杂的旋转、翻转和平移。在此,3d霍尔传感器连续地输出三个传感器信号,所述传感器信号能够推断出探测的磁场的空间变化。钕磁体特别好地适合作为永磁体。
8、在另一实施方式中,至少一个传感器设置在至少一个电路板上。在多个传感器的情况下,全部传感器可以设置在共同的电路板上,使得传感器单元基本上能够由紧凑的传感器模块构成。传感器单元可以具有壳体,所述壳体设置在集电器车辆处。至少一个传感器那么设置在壳体中,所述壳体定位成,使得至少一个传感器可以探测至少一个永磁体的磁场。
9、结构类型决定地可以有利的是,每个永磁体具有与相邻的永磁体不同的剩磁、不同的磁场强度、不同的磁化和/或在集电器处的不同位置。因为常规集电器单元的集电器通常紧密地并排设置,相邻的永磁体的磁场可以彼此影响或叠加,使得对于传感器而言会成问题的是,有针对性地探测相应的永磁体。通过使用不同的值,传感器可以有针对性地与刚好一个相应的永磁体的探测协调。
10、在另一可能的实施方式中,替选地或附加地可以有利的是,虽然空间场地有限,永磁体仍尽可能彼此远离地设置。因为相邻的集电器的永磁铁沿一个空间方向的间距通过集电器的间距预设,那么可以有利的是,相邻的集电器的永磁铁分别以距集电器的各自的轴承不同的间距设置在所述集电器处。从中例如可以得出永磁体的错开的之字形设置,使得相邻的永磁体的磁场尽可能少地相互影响。将固定点理解成如下部位或铰接部,在所述部位处或在所述铰接部处,集电器铰接地固定或悬挂在集电器车辆处。
11、在测量装置的另一可能的实施方式中,相邻的传感器分别具有距集电器的轴承轴线不同的间距。
12、在另一可能的且优选的实施方式中,永磁体和相应的传感器在集电器的零位中相对置。
13、同样在本发明的意义上不言而喻的是,本发明的前述构成方案彼此以构成组合的方式总结或其相应的优点彼此组合。
14、在至少一个集电器处可以设置有至少一个磁体保持件,所述磁体保持件保持至少一个永磁体。磁体保持件例如能够部分地或完全地由金属或专门的屏蔽塑料制成,这能够有利地减小在相邻的永磁体之间的相互作用,尤其通过各个永磁体的磁场的定向或有针对性的聚集和成形。替选地或附加地,至少一个永磁体能够固定在集电器处或者在其中可见地或不可见地集成。永磁体的外部形状可以影响外部磁场的形状,借此同样可以实现永磁体的各个磁场的相互作用的减小。
15、为了识别集电器或在其处设置的永磁体或还有传感器从而确保永磁体和传感器的正确的关联,在集电器或磁体保持件处可以设置有rfid应答器。在安装之后或在维护期间那么可以规定,传感器和永磁体的关联是否正确地构成。
16、在另一实施方式中,测量装置具有读取和/或通信设备,用于输出至少一个传感器信号或将至少一个传感器信号传送给数据处理装置。读取设备例如能够为usb端口、sd卡槽或任意其他适合的接口。作为通信设备例如考虑无线电发送器、发送器或任意其他适合的无线的或有线的至数据处理装置的传输可能性。在该情况下,数据处理装置根据至少一个传感器信号能够求取至少一个集电器的位置。
17、根据本发明的测量装置能够有利地构成为,使得其能够安置在现有的集电器单元处,使得现有的设施能够装配或加装根据本发明的测量装置。当然也可设想的是,集电器单元从工厂起已经配设有根据本发明的测量装置。
18、在根据本发明的用于运行根据本发明的测量装置的方法中,为了校准测量装置,将集电器同时地或单独地置于或借助于调整设备调整到不同的位置中。对于每个位置,求取由传感器测量的传感器信号并且与相应的位置相关联。借助于数据处理,所述数据和/或从中计算的、尤其相关的值或曲线和/或曲线集存储在知识数据库中。
19、在一个优选的实施方式中,在集电器单元的正常运行或检查运行中基于在此借助于传感器单元求取的传感器信号或值根据知识数据库的在校准时求取的和评估的数据,计算至少一个、优选全部集电器的真实的实际位置。
20、在校准时,因此产生至少一个集电器的不同位置,其方式为:不同的位置参数、如例如冲程和横向于行进方向的侧向偏移改变。这系统化地进行,其中至少一个位置参数保持恒定,而系统化地改变至少一个另外的位置参数,其中在每个这样产生的位置中,求取至少一个传感器信号并且与各自的位置相关联。
21、在另一实施方式中,可以取决于传感器的是,至少一个传感器生成多于一个传感器信号。在该情况下,数据处理装置将至少一个传感器的多个传感器信号彼此链接从而求取新值,使得至少一个新值能够与位置参数的组合从而与至少一个集电器的刚好一个位置关联。
22、在3d霍尔传感器的情况下,例如每个传感器输出三个传感器信号x、y、z。传感器信号x、y、z那么可以与位置参数、如例如冲程和偏移值h、a的相应的、即在各自的位置p中存在的组合相关联。在多个传感器信号的情况下,然而能够出现,根据传感器的配置或设置、其空间定向和/或测量的位置的类型,较高的传感器信号值不一定表示更高的冲程或更大的偏移。例如可能的是,虽然存在正的冲程,其中然而一个传感器信号或多个传感器信号通过集电器的同时翻转或旋转影响,使得在测量的传感器信号和有效冲程之间不可识别直接的线性的或单调的关联关系。从中在多个、尤其三个空间传感器信号的情况下,在没有另外的计算、尤其矢量计算的情况下终归不可行的是,限定距其他传感器信号的明确的间距。因此,必须找到如下方法,所述方法能够实现,建立在传感器信号和集电器运动之间的单调的关联关系。
23、纯示例性地,当对于每个(侧向)偏移值a={-15mm,-7.5mm,0,7.5mm,15mm}产生一组冲程值h={-15mm,-12.5mm,-10mm,……,10mm,12.5mm,15mm}并且检测对应的传感器信号x、y、z并且存储在知识数据库中时,这样能够系统性地在不同的位置p=(h,a)处求取一组传感器信号x、y、z。当然,冲程和偏移值的任意多个其他组合、其他网格化或也完全不同的位置参数根据集电器的工作领域同样能够是有意义的或有利的。
24、在上述示例中,那么得出具有冲程和偏移值的65个组合的(13×5)矩阵(13个冲程值,5个偏移值),所述组合分别对应于一个或全部集电器的刚好一个位置p=(h,a)。作为矩阵的条目,分别与所述位置p相关联的传感器信号x、y、z存储在知识数据库中。
25、在上面的示例中,在65个位置中的每个位置p=(h,a)中,例如可以求取两个新值dh和da,所述新值将属于每个位置p的传感器信号以不同的方式彼此链接。在实践中,对于上述实例而言已经证实为适合的是链接da=√(x2+y2+z2)以及dh=y/z,因为其对于固定的a或固定的h(即沿着上述(13×5)矩阵中的一行或一列)提供分别单调递增的值。当然,在其他传感器或位置参数的情况下,其他链接能够是有意义的或需要的,其在各个情况下始终应重新求取。
26、在方法的一个尤其优选的实施方式中,数据处理装置计算至少一个、尤其连续的数学函数,所述数学函数通过将新值插入到函数中来至少近似地计算不同位置的不同位置参数的相应的位置参数。
27、求取的函数原则上可以是任意适合的数学函数,如例如有理函数或多项式函数,所述有理函数或多项式函数根据之前计算的新值计算或以足够的精度接近偏移参数的值。
28、在方法的一个特别优选的实施方式中,对于位置参数h、a的每个在模拟中恒定的值(即对于上述示例的矩阵的每行和每列)求取刚好一个数学函数,使得对于给出的位置参数(即对于上述示例的矩阵的每行和每列)根据新值来求取相应的其他位置参数。
29、在上述示例中,那么例如可以求取有理函数(集)fh、fa,其通过将新值da、dh插入到对应的函数中至少良好近似地提供分别对于固定的a或固定的h(即沿着上述(13×5)矩阵中的一行或一列)的冲程h或横向于行进方向的偏移a,其中函数fh通过插入值da分别为固定的h提供偏移a并且函数fa通过插入值dh分别为固定的a提供冲程。以所述方式,用于每列的a的值通过函数fh并且每行的值h通过函数fa计算或接近。在当前的示例中,因此得出总计18个函数(5个fa和13个fh),其栅格状地或网格状地覆盖整个位置空间p=(h,a)。
30、通过网格状地覆盖整个位置空间,在正常运行中或在检查运行中,可以确定在至少一个在正常运行中或在检查运行中测量的传感器信号和至少一个传感器信号在校准时求取的值之间的最小间距q,并且与相应的位置相关联,使得对于在正常运行中或在检查运行中求取的新值根据相应的函数可以计算或接近至少一个或全部集电器的真实的实际位置的位置参数。
31、在上面的示例中,这表示,对于在正常运行中或在检查运行中测量的传感器信号xr、yr、zr借助于矢量计算来确定在校准中求取的和在知识数据库中存储的下一传感器信号x、y、z,其中下一传感器信号x、y、z与特定的位置p相关联。所述位置与两个交叉的函数fh、fa相关联,在正常运行中测量的新值dhr、dar插入到所述函数中从而确定在正常运行中或在检查运行中的实际位置pr的相应的位置参数hr、ar。以所述方式,集电器的位置pr可以连续地并且在整个设施伸展的范围中确定。
32、当所有集电器借助于校准设备共同地逐步地提升和偏移时,得出所述上述65个组合。只要校准设备并非共同地、而是单独地偏移集电器,并且对于每个集电器设置数量为az的侧向偏移a和数量为hz的冲程h,那么在数量为sz的集电器的情况下得出(az×hz)^sz个不同的组合或位置p=(sz,h,a)从而三维矩阵,从所述三维矩阵中随后求取和计算其他的值和函数。在此,不同的冲程位置和偏移的数量应对应地选择,借此校准过程不持续过长时间。此外,集电器彼此间的特定位置对于导出函数不是重要的,因为例如彼此更远离的集电器的磁场不彼此相互影响。
33、在方法的一个尤其优选的实施方式中,校准部分自动地或完全自动地进行。在此,上述校准步骤中的至少一个可以自动地进行。有利地,所有校准步骤可以自动地进行。例如,至少一个集电器能够自动地置入不同的设为用于校准的位置p中和/或自动地存储在所述位置处测量的传感器信号x、y、z和/或自动地求取数学函数fh、fa和/或自动地求取新值dh、da。
34、在上面的示例中,那么优选地所有集电器能够自动地置于所有在上文中规定的13×5=65个位置中,其中在每个位置处自动地测量传感器信号x、y、z并且在数据处理装置中存储。随后,数据处理装置能够完全自动地求取和存储新值dh、da和数学函数fh、fa,使得随后集电器单元完全校准并且能够投入运行。以所述方式,校准能够非常简单地且可靠地执行。当然,对应的程序例程事先必须在数据处理机构中规定。
35、如果如上所述,集电器彼此借助于校准设备也彼此置于不同的位置中并且处理在此求取的大量测量值,那么全自动的校准尤其适合。
36、也可以有利的是,校准的仅一个或一些步骤自动地进行。如果不同结构类型的集电器单元应借助相同的校准设备校准,那么这例如能够是所述情况。那么可行的是,适配于一个集电器单元的位置矩阵不适合于其他集电器单元。在该情况下可以有利的是,对应的矩阵必须/能够由用户事先选择。传感器信号x、y、z的随后的测量和/或数学函数fh、fa和新值dh、da的求取那么能够与选择的矩阵相关地自动地进行。
37、在方法的一个实施方式中,校准通过经过滑触导电轨的明确规定的路段进行。这具有实际优点,即校准在检查运行期间在不拆卸的情况下可以始终再次检查和必要时修正。
38、在本发明的另一实施方式中,集电器的不同位置的设定通过专门为其设置的校准设备进行。
39、用于执行根据本发明的方案的适合的校准设备具有:滑触导电轨的至少一个明确规定的路段;至少一个集电器;至少一个行进设备,用于调整集电器、尤其冲程和横向于行进方向的侧向偏移;至少一个电子控制单元,用于控制至少一个行进设备和用于将至少一个传感器信号传送给至少一个数据处理装置,所述数据处理装置根据至少一个传感器信号和已知的位置参数来求取新值和至少一个数学函数。
40、当然,在根据本发明的方法或根据本发明的校准设备中原则上可行的是,将全部集电器同时地或一个、尤其每个集电器单独地相对于另一集电器调整和校准。在校准单个集电器时,其余的集电器或仅一个或多个相邻的集电器能够对于应校准的集电器的每个位置置于应事先限定的位置中,使得永磁体的磁场的在集电器的不同位置中彼此间存在的不同的相互影响一起影响校准。例如能够有利的是,各刚好两个相邻的集电器单独地校准,其方式为:如上所述地根据位置参数校准应校准的集电器,其中至少一个另外的位置参数与应校准的集电器的位置链接,所述位置对应于一个或多个其余的、尤其相邻的集电器的位置。在正常运行或检查运行中,所述至少一个另外的位置参数那么在测量中考虑。在此,能够足够的是,仅各个集电器的彼此不同的冲程或相对于彼此的侧向偏移还附加地考虑。通常但是有意义的是,考虑至少相邻的集电器的不同的冲程和不同的偏移,使得此后也可以可靠地检测不同的冲程和/或偏移。
41、因此,适合的校准设备具有适合的一个行进设备或多个行进设备,所述行进设备能够实现彼此无关地调整集电器。借助这样校准的集电器单元可设想还更精确的测量。如果集电器触点不同时损耗或如果滑触导电轨的仅一个相被污染或尤其强地污染,那么这尤其适合。
- 还没有人留言评论。精彩留言会获得点赞!