刚性接触网定位点实时检测的方法及装置与流程
本技术涉及轨道车辆运行监测领域,具体而言,涉及一种刚性接触网定位点实时检测方法及装置。
背景技术:
1、在电气化城市轨道交通系统中,刚性接触网主要由悬挂装置、定位装置和支吊柱等基础设施组成,地铁列车通过其顶部的受电弓与刚性接触网间的滑动接触来获取运行所需电流。评价刚性接触网受流标志的参数主要由导高值、拉出值和刚性接触网磨耗等几何参数组成,而对于检测到的上述几何参数必须结合刚性接触网的定位点才能准确追溯故障。
2、现有技术中,公开的专利如《一种基于激光雷达的接触网检测检修车》,专利号为:cn205097980u,使用低频率激光雷达对接触网定位点进行扫描,但是接触网检测检修车速度可控,不符合当前城轨交通动态检测的要求,应用场景有限。除了激光雷达的技术,市场上还出现了电子标签检测技术以及gps定位技术,前者虽检测精度高,但实施成本较大,无法大规模的进行铺设,gps定位技术也因其大量的实施成本以及隧道网络环境差带来的高漏检率,无法满足用户的要求。再有如公开专利如《一种实时刚性接触网定位点识别方法》,专利号:cn111723793b,该专利采用图像预处理、区域定位、定位点检测等一系列算法处理,消耗了大量的计算资源,现实应用场景中无法保证全检的目标。
3、针对轨道交通领域,列车高速运行的环境下,实时进行刚性接触网定位点的检测导致成本过大的问题,目前尚未有合理解决办法。
技术实现思路
1、本技术实施例提供了一种刚性接触网定位点实时检测方法及装置,用于解决上述轨道交通领域,列车高速运行的环境下,实时进行刚性接触网定位点的检测导致成本过大的问题。
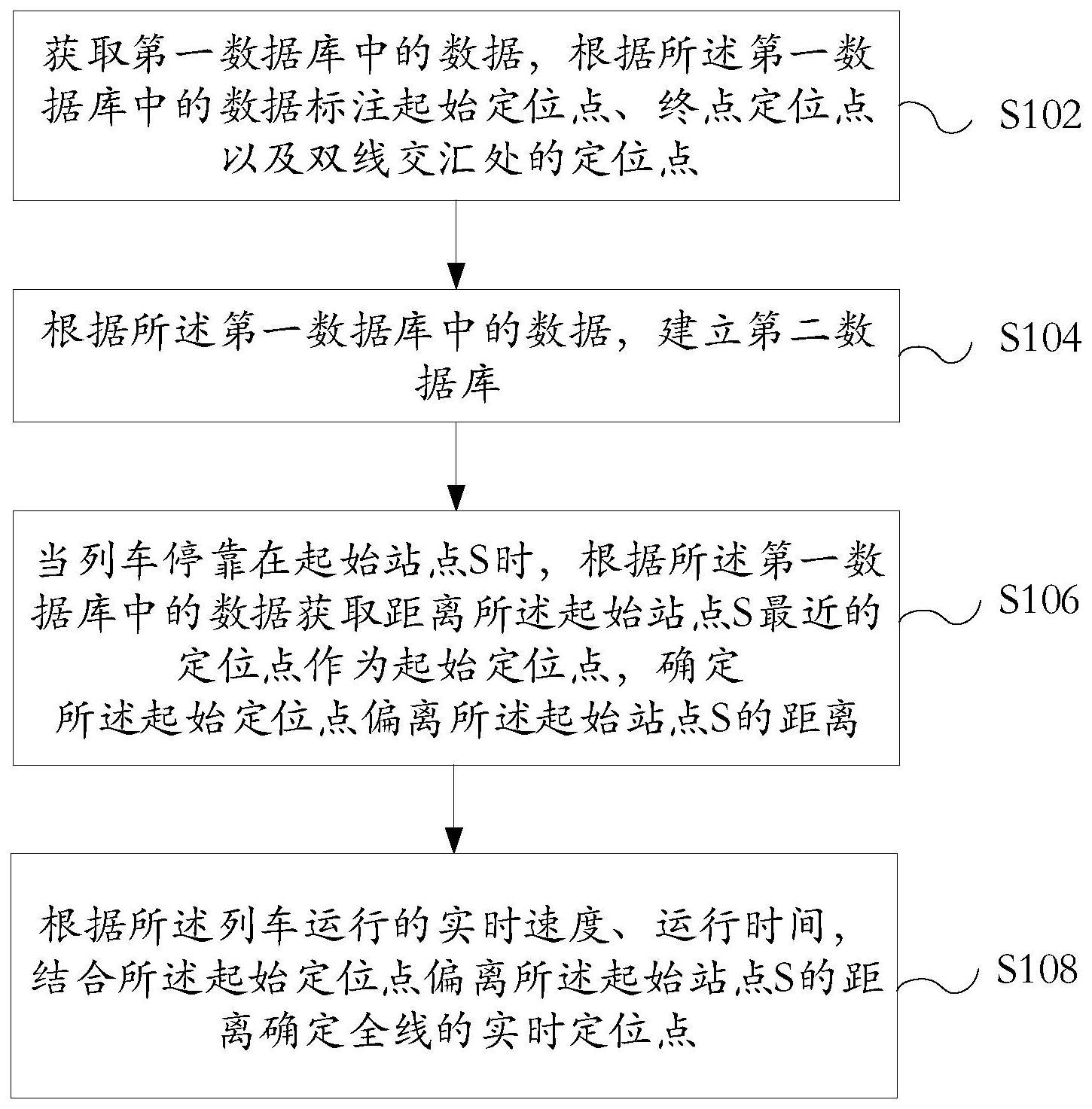
2、根据本技术的一个实施例,提供了一种刚性接触网定位点实时检测的方法,包括:获取第一数据库中的数据,根据所述第一数据库中的数据标注起始定位点、终点定位点以及双线交汇处的定位点,其中,所述第一数据库为全线刚性接触网的定位点数据,所述全线包括一条完整的地铁运行线路,所述全线刚性接触网包括若干段拼接在一起的刚性接触网,所述双线交汇处为相邻两段刚性接触网平行交汇的部分,所述定位点数据至少包括:定位点的标识、定位点的坐标以及定位点的数量;根据所述第一数据库中的数据,建立第二数据库,其中,所述第二数据库中包括:相邻定位点之间的距离;当列车停靠在起始站点s时,根据所述第一数据库中的数据获取距离所述起始站点s最近的定位点作为起始定位点,以±λ表示所述起始定位点偏离所述起始站点s的距离,其中,+λ代表沿着列车行驶方向前进距离,-λ代表沿着列车行驶方向后退距离;根据所述列车运行的实时速度vt、运行时间t,结合所述起始定位点偏离所述起始站点s的距离±λ确定全线的实时定位点,其中,所述列车的位移通过积分公式实时获取。
3、在一实施例中,所述方法还包括:在所述列车的顶部安装单目视觉装置,其中,所述单目视觉装置包括线激光发射模块和高清工业相机;通过向上发射的线激光及高清工业相机组成一组激光三角测距模块,向上测距的同时又能采集到双线交汇处的刚性接触网轮廓图片,使用图像处理灰度增强及边缘分割等算法提取双线交汇处轮廓特征,使用该轮廓特征作为双线交汇触发的依据;所述列车每次行驶至双线交汇处时,确定上一段刚性接触网的定位点实时计算结束,启动下一段刚性接触网的定位点实时计算。
4、在一实施例中,所述方法还包括:通过在所述高清工业相机的镜头前设置滤光片,滤除自然光谱波段。
5、在一实施例中,所述根据所述列车运行的实时速度vt、运行时间t,结合所述起始定位点偏离所述起始站点s的距离±λ确定全线的实时定位点,包括:所述列车从所述起始站点s行驶时,记录第一段刚性接触网内首个定位点x1a的位置为±λ,根据所述第二数据库中相邻定位点之间的距离,在所述积分公式的计算值达到下一个定位点与当前定位点的距离时,实时得到第二个定位点x1b的位置为tb为所述列车从定位点x1a运行至定位点x1b的时间,实时计算的第三个定位点x1c的位置为tc为所述列车从定位点x1b运行至定位点x1c的时间,依次类推,q1={x1a,x1b,x1c.....,x1n}为第一段刚性接触网内实时计算的定位点的位置,n表示第一段刚性接触网内定位点的数量,进而得出全线接触网定位点的实时计算值为z={q1,q2,.....,qi},i代表全线刚性接触网的数量。
6、在一实施例中,所述方法还包括:根据每一段刚性接触网的设计长度和实时计算的里程的差值,确定第一误差因子η;根据所述第一误差因子η对所述第一段刚性接触网内实时计算的定位点进行校正,得到校正后所述第一段刚性接触网内实时计算的定位点的位置:进而得到校正后的全线接触网定位点位置的实时计算值为:z’=z-η={q1-η,q2-η,.....,qi-η}。
7、在一实施例中,所述根据所述列车运行的实时速度vt、运行时间t,结合所述起始定位点偏离所述起始站点s的距离±λ确定全线的实时定位点,还包括:所述列车从所述起始站点s行驶时,记录起始站点s至下一站点之间首个定位点x1a的位置为±λ,根据所述第二数据库中相邻定位点之间的距离,在所述积分公式的计算值达到下一个定位点与当前定位点的距离时,实时得到第二个定位点x1b的位置为tb为所述列车从定位点x1a运行至定位点x1b的时间,实时计算的第三个定位点x1c的位置为tc为所述列车从定位点x1b运行至定位点x1c的时间,依次类推,k1={x1a,x1b,x1c.....,x1m}为起始站点s至下一站点之间实时计算的定位点的位置,m表示起始站点s至下一站点之间定位点的数量,进而得出全线接触网定位点的实时计算值为f={k1,k2,.....,kj},j代表所述列车在全线停靠的终点站点的标号。
8、在一实施例中,所述方法还包括:根据全线相邻站点之间的设计距离和实时计算的里程的差值,确定第二误差因子ζ;根据所述第二误差因子ζ对所述起始站点s至下一站点之间实时计算的定位点进行校正,得到校正后所述第一段刚性接触网内实时计算的定位点的位置:进而得到校正后的全线接触网定位点位置的实时计算值为:
9、f’=f-ζ={k1-ζ,k2-ζ,.....,kj-ζ}。
10、在本技术的一个实施例中,还提出了一种刚性接触网定位点实时检测的装置,包括:
11、标注模块,配置为获取第一数据库中的数据,根据所述第一数据库中的数据标注起始定位点、终点定位点以及双线交汇处的定位点,其中,所述第一数据库为全线刚性接触网的定位点数据,所述全线包括一条完整的地铁运行线路,所述全线刚性接触网包括若干段拼接在一起的刚性接触网,所述双线交汇处为相邻两段刚性接触网平行交汇的部分,所述定位点数据至少包括:定位点的标识、定位点的坐标以及定位点的数量;
12、建立模块,配置为根据所述第一数据库中的数据,建立第二数据库,其中,所述第二数据库中包括:相邻定位点之间的距离;
13、设定模块,配置为当列车停靠在起始站点s时,根据所述第一数据库中的数据获取距离所述起始站点s最近的起始定位点,以±λ表示所述起始定位点偏离所述起始站点s的距离,其中,+λ代表沿着列车行驶方向前进距离,-λ代表沿着列车行驶方向后退距离;
14、确定模块,配置为根据所述列车运行的实时速度vt、运行时间t,结合所述起始定位点偏离所述起始站点s的距离±λ确定全线的实时定位点,其中,所述列车的位移通过积分公式实时获取。
15、在本技术的一个实施例中,还提出了一种计算机可读的存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项方法实施例中的步骤。
16、在本技术的一个实施例中,还提出了一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项方法实施例中的步骤。
17、本技术提供了一种刚性接触网定位点实时检测的方法,在原有弓网系统的基础上,不增加任何电子标签、雷达等硬件设备的前提下,通过全线定位点数据库中的定位点数据,结合单目视觉装置,在列出运行过程中实时获取定位点的位置信息,解决了上述轨道交通领域,列车高速运行的环境下,实时进行刚性接触网定位点的检测导致成本过大的问题。通过数据库预存、图像识别以及定位点校正技术实现非接触式的刚性接触网定位点识别技术,区别于以往的电子标签、雷达以及gps的定位技术,该方案成本较低,算法实现较为简便,能够使用用户提供的数据进行参考和监督,定位可靠性较高,无漏报的情况。
- 还没有人留言评论。精彩留言会获得点赞!