异常回波识别方法、装置、设备及存储介质与流程
本发明涉及回波识别,尤其涉及一种异常回波识别方法、装置、设备及存储介质。
背景技术:
1、激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统,从工作原理上讲:激光雷达向目标发射探测信号,然后将接收到的从目标反射回来的回波信号与发射信号进行比较,作适当处理后就可获得目标的有关信息。如目标距离、强度、方位角等。因此,在激光雷达技术中,回波信号的准确性从原理上决定了激光雷达的性能。
2、现有的激光雷达的回波识别为通过后期图像处理算法对一帧或多帧数据进行处理,不具备实时性,对环境的适应性较差,从而导致检测不够准确。
技术实现思路
1、本发明的主要目的在于提供一种异常回波识别方法、装置、设备及存储介质,旨在解决现有技术激光雷达回波识别不够准确的技术问题。
2、为实现上述目的,本发明提供了一种异常回波识别方法,所述方法包括以下步骤:
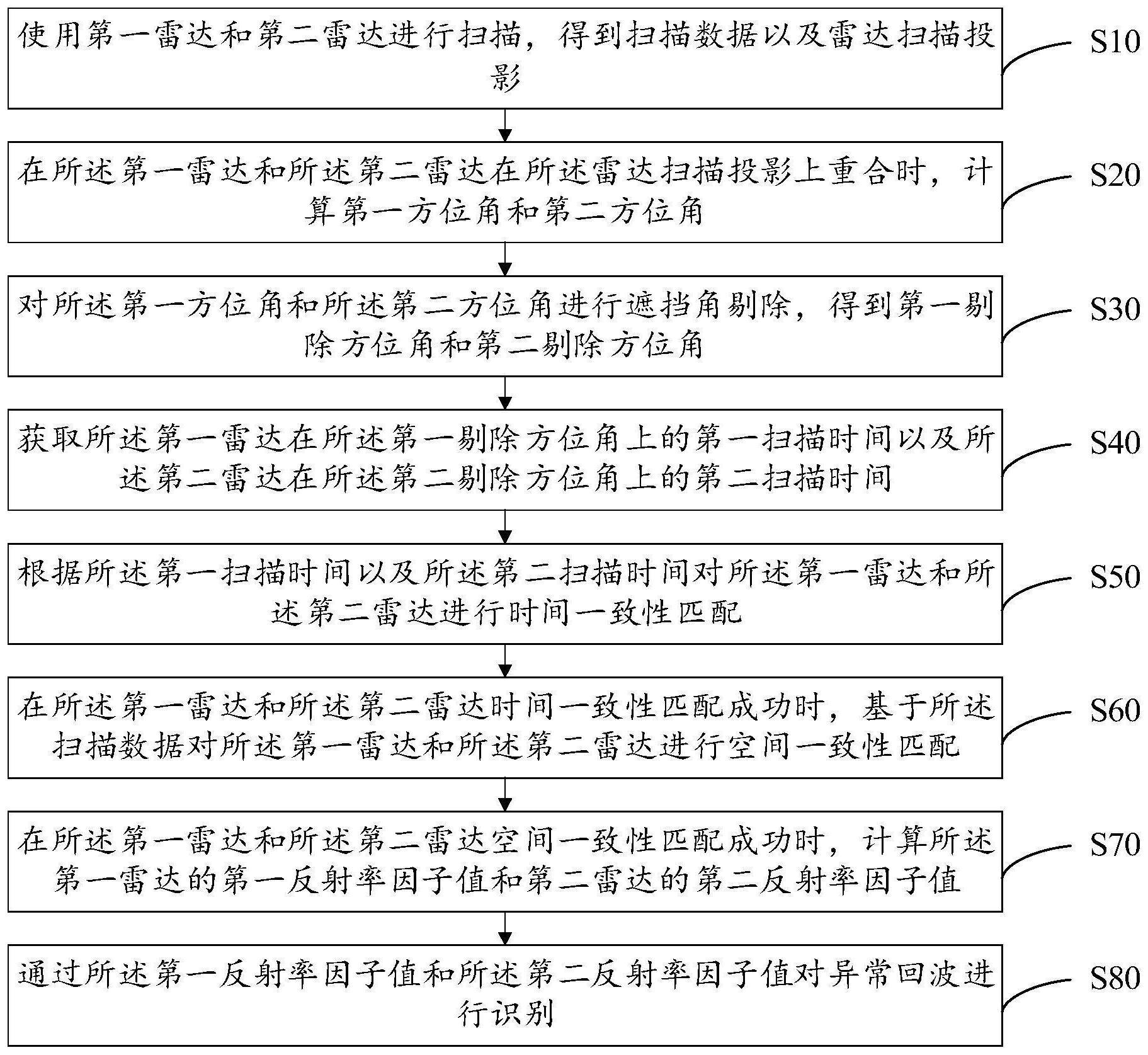
3、使用第一雷达和第二雷达进行扫描,得到扫描数据以及雷达扫描投影;
4、在所述第一雷达和所述第二雷达在所述雷达扫描投影上重合时,计算第一方位角和第二方位角;
5、对所述第一方位角和所述第二方位角进行遮挡角剔除,得到第一剔除方位角和第二剔除方位角;
6、获取所述第一雷达在所述第一剔除方位角上的第一扫描时间以及所述第二雷达在所述第二剔除方位角上的第二扫描时间;
7、根据所述第一扫描时间以及所述第二扫描时间对所述第一雷达和所述第二雷达进行时间一致性匹配;
8、在所述第一雷达和所述第二雷达时间一致性匹配成功时,基于所述扫描数据对所述第一雷达和所述第二雷达进行空间一致性匹配;
9、在所述第一雷达和所述第二雷达空间一致性匹配成功时,计算所述第一雷达的第一反射率因子值和第二雷达的第二反射率因子值;
10、通过所述第一反射率因子值和所述第二反射率因子值对异常回波进行识别。
11、可选地,所述根据所述第一扫描时间以及所述第二扫描时间对所述第一雷达和所述第二雷达进行时间一致性匹配,包括:
12、计算所述第一扫描时间和所述第二扫描时间之间的时间差;
13、获取时间匹配阈值;
14、将所述时间差与所述时间匹配阈值进行比较;
15、在所述时间差小于所述时间匹配阈值时,确定所述第一雷达和所述第二雷达时间一致性匹配成功;
16、在所述时间差大于等于所述时间匹配阈值时,确定所述第一雷达和所述第二雷达时间一致性匹配不成功。
17、可选地,所述在所述第一雷达和所述第二雷达时间一致性匹配成功时,基于所述扫描数据对所述第一雷达和所述第二雷达进行空间一致性匹配,包括:
18、在所述第一雷达和所述第二雷达时间一致性匹配成功时,根据所述扫描数据得到第一仰角、第二仰角、所述第一雷达的第一斜距和所述第二雷达的第二斜距、半径系数、地球半径、第一雷达的雷达站点的站点经度、站点纬度以及站点海拔高度;
19、通过所述第一仰角、所述第一斜距以及所述第一剔除方位角得到第一极坐标并通过所述第二仰角、所述第二斜距以及所述第二剔除方位角得到第二极坐标;
20、通过所述半径系数、所述地球半径、所述站点经度、所述站点纬度以及所述站点海拔高度对所述第一极坐标进行坐标转换,得到第一经纬度坐标;
21、将所述第一经纬度坐标进行雷达极坐标转换,得到转换雷达极坐标;
22、通过所述转换雷达极坐标、所述第二极坐标、所述地球半径以及所述站点海拔高度计算第一海拔高度和第二海拔高度;
23、通过所述第一海拔高度和所述第二海拔高度对所述第一雷达和所述第二雷达进行空间一致性匹配。
24、可选地,所述通过所述半径系数、所述地球半径、所述站点经度、所述站点纬度以及所述站点海拔高度对所述第一极坐标进行坐标转换,得到第一经纬度坐标,包括:
25、通过所述半径系数、所述地球半径、所述站点海拔高度、所述第一极坐标中的第一仰角以及所述第一斜距计算雷达点与原点在地心处的第一夹角;
26、计算所述第一夹角的余弦值和所述第一夹角的正弦值、所述站点纬度的正弦值和所述站点纬度的余弦值以及所述第一剔除方位角的正弦值和所述第一剔除方位角的余弦值;
27、通过所述第一夹角的余弦值、所述站点纬度的正弦值、所述第一夹角的正弦值、所述站点纬度的余弦值以及所述第一剔除方位角的余弦值计算第一纬度点;
28、计算所述第一纬度点的余弦值;
29、通过所述第一剔除方位角的正弦值、所述第一夹角的正弦值、所述第一经度点的余弦值以及所述站点经度计算第一纬度点;
30、通过所述第一经度点和所述第一纬度点得到第一经纬度坐标。
31、可选地,所述通过所述第一海拔高度和所述第二海拔高度对所述第一雷达和所述第二雷达进行空间一致性匹配,包括:
32、计算所述第一海拔高度与所述第二海拔高度之间的海拔高度差;
33、获取高度差阈值;
34、将所述海拔高度差与所述高度差阈值进行比较;
35、在所述海拔高度差小于所述高度差阈值时,确定所述第一雷达和所述第二雷达空间一致性匹配成功;
36、在所述海拔高度差大于等于所述高度差阈值时,确定所述第一雷达和所述第二雷达空间一致性匹配不成功。
37、可选地,所述在所述第一雷达和所述第二雷达空间一致性匹配成功时,计算所述第一雷达的第一反射率因子值和第二雷达的第二反射率因子值,包括:
38、在所述第一雷达和所述第二雷达空间一致性匹配成功时,通过所述扫描数据得到第一雷达发射功率、第二雷达发射功率、天线增益、第一雷达波长、第二雷达波长、雷达后向散射截面、第一雷达和目标物的第一距离、第二雷达和目标物的第二距离、波束有效照射体内产生的散射能量粒子数以及雷达常数;
39、通过所述第一雷达发射功率、所述天线增益、所述第一雷达波长、所述雷达后向散射截面、所述第一距离以及所述散射能量粒子数计算第一回波功率;
40、通过所述第二雷达发射功率、所述天线增益、所述第二雷达波长、所述雷达后向散射截面、所述第二距离以及所述散射能量粒子数计算第二回波功率;
41、分别对所述第一回波功率和所述第二回波功率进行平均,得到第一平均回波功率和第二平均回波功率;
42、通过所述第一平均回波功率、所述雷达常数以及所述第一距离计算第一雷达的第一反射率因子值;
43、通过所述第二平均回波功率、所述雷达常数以及所述第二距离计算第二雷达的第二反射率因子值。
44、可选地,所述对所述第一方位角和所述第二方位角进行遮挡角剔除,得到第一剔除方位角和第二剔除方位角,包括
45、获取所述第一雷达和所述第二雷达所述雷达扫描投影上重合区域的预设遮挡角;
46、通过所述预设遮挡角对所述第一方位角和所述第二方位角进行剔除,得到第一剔除方位角和第二剔除方位角。
47、此外,为实现上述目的,本发明还提出一种异常回波识别装置,所述异常回波识别装置包括:
48、扫描模块,用于使用第一雷达和第二雷达进行扫描,得到扫描数据以及雷达扫描投影;
49、计算模块,用于在所述第一雷达和所述第二雷达在所述雷达扫描投影上重合时,计算第一方位角和第二方位角;
50、剔除模块,用于对所述第一方位角和所述第二方位角进行遮挡角剔除,得到第一剔除方位角和第二剔除方位角;
51、获取模块,用于获取所述第一雷达在所述第一剔除方位角上的第一扫描时间以及所述第二雷达在所述第二剔除方位角上的第二扫描时间;
52、匹配模块,用于根据所述第一扫描时间以及所述第二扫描时间对所述第一雷达和所述第二雷达进行时间一致性匹配;
53、所述匹配模块,还用于在所述第一雷达和所述第二雷达时间一致性匹配成功时,基于所述扫描数据对所述第一雷达和所述第二雷达进行空间一致性匹配;
54、所述计算模块,还用于在所述第一雷达和所述第二雷达空间一致性匹配成功时,计算所述第一雷达的第一反射率因子值和第二雷达的第二反射率因子值;
55、识别模块,用于通过所述第一反射率因子值和所述第二反射率因子值对异常回波进行识别。
56、此外,为实现上述目的,本发明还提出一种异常回波识别设备,所述异常回波识别设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的异常回波识别程序,所述异常回波识别程序配置为实现如上文所述的异常回波识别方法的步骤。
57、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有异常回波识别程序,所述异常回波识别程序被处理器执行时实现如上文所述的异常回波识别方法的步骤。
58、本发明使用第一雷达和第二雷达进行扫描,得到扫描数据以及雷达扫描投影;在所述第一雷达和所述第二雷达在所述雷达扫描投影上重合时,计算第一方位角和第二方位角;对所述第一方位角和所述第二方位角进行遮挡角剔除,得到第一剔除方位角和第二剔除方位角;获取所述第一雷达在所述第一剔除方位角上的第一扫描时间以及所述第二雷达在所述第二剔除方位角上的第二扫描时间;根据所述第一扫描时间以及所述第二扫描时间对所述第一雷达和所述第二雷达进行时间一致性匹配;在所述第一雷达和所述第二雷达时间一致性匹配成功时,基于所述扫描数据对所述第一雷达和所述第二雷达进行空间一致性匹配;在所述第一雷达和所述第二雷达空间一致性匹配成功时,计算所述第一雷达的第一反射率因子值和第二雷达的第二反射率因子值;通过所述第一反射率因子值和所述第二反射率因子值对异常回波进行识别,通过计算第一反射率因子值和第二反射率因子值,从而通过第一反射率因子值和第二反射率因子值对是否存在异常回波进行识别,通过反射率因子值快速准确的对异常的回波进行识别,提高回波识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!