车载毫米波雷达遮挡检测方法、装置、设备及介质与流程
本发明涉及汽车,尤其涉及一种车载毫米波雷达遮挡检测方法、装置、设备及介质。
背景技术:
1、由于辅助驾驶的普及,越来越多的车辆配置了毫米波雷达,使得车载毫米波的保有量快速增长。然而在车辆使用过程中毫米波雷达一定概率会被全部遮挡或者部分遮挡,这都会对辅助驾驶系统造成一定的影响。因此,在毫米波雷达被全部遮挡或者部分遮挡时应该及时准确的上报遮挡故障。
2、现有方案一:将当前有效统计分布情况与遮挡状态下的参考统计分布情况进行相似度比对。若相似度低于预设阈值,则判定车载雷达未被遮挡,否则,结合逻辑判断,判定车载雷达存在遮挡。该方案的缺点在于雷达遮挡物的种类、厚度可达无数种组合,遮挡状态下的参考统计分布情况无法穷举,也无法和无数种组合中进行一一对比。因此,该方案非常容易形成遮挡漏检测的情况。
3、现有方案二:分别计算两种遮挡状态下的遮挡置信度总和,获得有、无遮挡两个条件下的遮挡特征边界,并基于此确定遮挡与否的置信度总和阈值,从而将该阈值作为遮挡检测算法的输入。完成对毫米波雷达遮挡情况的自适应判断,实现毫米波雷达遮挡实时自检测与遮挡报警功能。该方案的缺点在于需要事先经过大量测试,并且针对每种材料都需要进行测试,以适配不同的车型。实施起来较为繁琐。
4、现有方案三:利用fft幅度变化、fft幅度变化率、幅度特征统计中的一种判断是否遮挡。该方法利用天线出来后做了fft的数据,属于早期的数据,数据量大,对这些数据做额外的处理比较耗算力和内存。
5、现有方案四:利用静止物体在一定厚度异物遮挡情遮挡和未遮挡下的差异设置阈值,通过探测出来的数据和阈值对比后得到是否别遮挡该方案的缺点在于只适用于一定厚度异物遮挡情况和未遮挡,未考虑当车载前毫米波雷达本身就是布置在保杠后方。
6、现有方案五:向预设方向发射调频带宽,然后对回波信号强度进行分析。从而判断雷达是否被遮挡。该方案受到条件的限制,可实施性不强。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明的目的在于提供一种车载毫米波雷达遮挡检测方法、装置、设备及介质。
2、为达此目的,本发明采用以下技术方案:
3、第一方面,一种车载毫米波雷达遮挡检测方法,包括以下步骤:
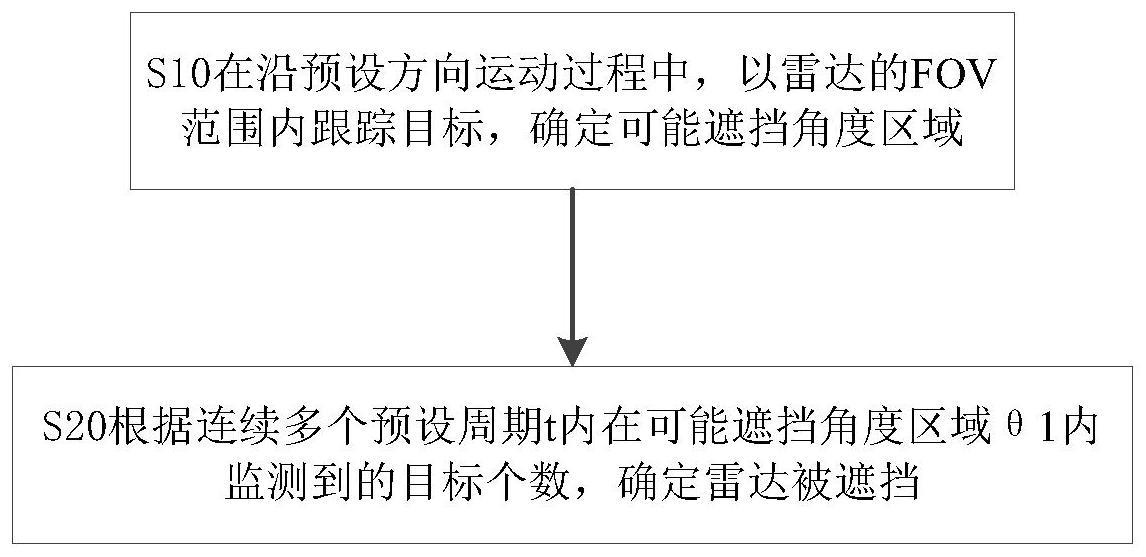
4、在沿预设方向运动过程中,以雷达的fov范围内跟踪目标,确定可能遮挡角度区域;
5、根据连续多个预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡。
6、在一个实施例中,所述在沿预设方向运动过程中,以雷达的fov范围内跟踪目标,确定可能遮挡角度区域的步骤包括:
7、根据所述雷达的稳定跟踪目标距离,确定fov范围。
8、在一个实施例中,所述根据连续预设个数的预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤包括:
9、在预设周期内可能遮挡角度区域内监测到的目标个数与应经过的目标个数的比值小于或等于预设比值时,则条件满足度增加m%;
10、当所述条件满足度增加至100%,确定雷达被遮挡。
11、在一个实施例中,所述根据连续多个预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤还包括:
12、若所述比值大于所述预设比值,则当前条件满足度减小n%,其中,n>m。
13、在一个实施例中,n与m呈倍数关系。
14、在一个实施例中,所述根据连续预设个数的预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤还包括:
15、根据所述预设个数和所述预设周期,确定报出时长;
16、若在所述报出时长内未检索到目标或检测到的目标一直相对本车静止,且底噪维持在预设底噪以上,则确定所有雷达的fov均被遮挡。
17、在一个实施例中,所述根据连续预设个数的预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤还包括:
18、若目标跟踪匹配不上的区域刚好和其中一个毫米波雷达的fov在空间上一致,则确定所述雷达被全部遮挡;
19、若目标跟踪匹配不上的区域刚好和其中一个毫米波雷达的fov在空间上部分重合,则确定所述雷达被部分遮挡。
20、第二方面,一种车载毫米波雷达遮挡检测装置,包括:
21、第一模块,用于在沿预设方向运动过程中,以雷达fov范围内跟踪目标,确定可能遮挡角度区域;
22、第二模块,用于根据连续多个预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡。
23、第三方面,一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的车载毫米波雷达遮挡检测方法。
24、第四方面,一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如上述的车载毫米波雷达遮挡检测方法。
25、本发明的有益效果:
26、对于车载毫米波雷达遮挡检测方法、装置、设备及介质,在沿预设方向运动过程中,以雷达的fov范围内跟踪目标,确定可能遮挡角度区域,根据连续多个预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡,可精准的识别出是哪个雷达的那个区域被遮挡,精准度高。
27、本申请附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种车载毫米波雷达遮挡检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车载毫米波雷达遮挡检测方法,其特征在于,所述在沿预设方向运动过程中,以雷达的fov范围内跟踪目标,确定可能遮挡角度区域的步骤包括:
3.根据权利要求1所述的车载毫米波雷达遮挡检测方法,其特征在于,所述根据连续预设个数的预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤包括:
4.根据权利要求3所述的车载毫米波雷达遮挡检测方法,其特征在于,所述根据连续多个预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤还包括:
5.根据权利要求4所述的车载毫米波雷达遮挡检测方法,其特征在于,n与m呈倍数关系。
6.根据权利要求3所述的车载毫米波雷达遮挡检测方法,其特征在于,所述根据连续预设个数的预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤还包括:
7.根据权利要求6所述的车载毫米波雷达遮挡检测方法,其特征在于,所述根据连续预设个数的预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡的步骤还包括:
8.一种车载毫米波雷达遮挡检测装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的车载毫米波雷达遮挡检测方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如权利要求1至7任一项所述的车载毫米波雷达遮挡检测方法。
技术总结
本发明公开了一种车载毫米波雷达遮挡检测方法、装置、设备及介质,其中车载毫米波雷达遮挡检测方法包括以下步骤:在沿预设方向运动过程中,以雷达的FOV范围内跟踪目标,确定可能遮挡角度区域;根据连续多个预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡。有益效果:可精准的识别出是哪个雷达的那个区域被遮挡,精准度高。
技术研发人员:刘春华,咸志伟,李明虎,刘千韦,胡华军
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!