一种用于农业运输设备的定位导航方法
本发明涉及电缆,具体涉及一种用于农业运输设备的定位导航方法。
背景技术:
1、农场无人化已成为世界现代化农业发展趋势,全球各国都在加快农场无人化布局,加深人工智能、无人化等技术在农业领域的应用。农业现代化的升级转型过程中,实现现代农业生产、存储、运输、销售等各环节智能无人化是实现农业现代化的关键。
2、而我国目前农业产品的运输仍大量依靠人力,尤其是大棚、温室等设施内的作业空间狭小,在大棚、温室采摘过程中,果实的运输还是依靠传统的人力搬运,导致运输过程实体损耗和价值损耗严重,运输人力成本较高,农业的从业人员劳动负担大。
3、目前常用的定位导航技术包括卫星导航系统、激光定位导航技术、视觉定位导航技术、惯性导航技术等。卫星导航系统的信号需要经过卫星和地面设备的处理,存在一定的延迟问题,且卫星导航系统的信号无法穿透建筑物,室内覆盖效果较差,卫星定位导航的灵活性和便利性受到限制,不适用于设施农业内部的定位导航;激光定位导航技术、视觉定位导航技术、惯性导航技术虽然可以提供非常精确的三维地图和定位信息,但对于较为严苛的环境的适应性较差,不适用于大棚、温室等农业设施的环境,以及农场环境中。
技术实现思路
1、针对上述现有的无人车导航定位技术,不适用余农场环境和大棚、温室等设施环境的技术问题,本技术方案提供了一种用于农业运输设备的定位导航方法,在农场环境或大棚、温室等环境中设置uwb定位基站,并在农场环境中设置多个uwb定位模块,农业运输设备上安装有uwb定位标签,使用uwb多边定位对运输设备进行定位,通过调整定位信息获取的频率实现对运输设备的轨迹跟踪,获取设施内栅格地图信息,通过地图信息和定位信息对运输设备的作业路径进行规划,实现农业运输设备农业内的定位导航;能有效的解决上述问题。
2、本发明通过以下技术方案实现:
3、一种用于农业运输设备的定位导航方法,所述的农业运输设备运行在农场对应的环境中,通过定位导航系统对无人驾驶的农业运输设备进行导航;所述的定位导航方法具体包括步骤:
4、步骤1:建立农场的定位环境:
5、在农场对应的环境中设置uwb定位基站,并在农场环境中设置多个uwb定位模块,农业运输设备上安装有uwb定位标签;并在对应的控制软件中建立农场模型;
6、步骤2:制作农场的栅格地图:
7、根据农业运输设备的位置信息,计算得到农业运输设备在农场模型中的位置信息;再操控农业运输设备在农场环境中行驶,uwb定位基站记录农业运输设备在农场环境中的行驶轨迹,得到农场环境相关的地图;对农业运输设备轨迹进行追踪,并保存对应的轨迹地图作为农业运输设备在农场环境中运行的栅格轨迹地图;
8、步骤3:对运输设备进行路径规划:通过运输设备的定位信息和构建的农场环境栅格地图信息,对运输设备进行路径规划;具体的操作方式为:
9、根据步骤2创建的栅格轨迹地图,设置农业运输设备的终点坐标为(xe,ye),根据农业运输设备的起始位置坐标和终点坐标对农业运输设备的行驶路径进行规划;
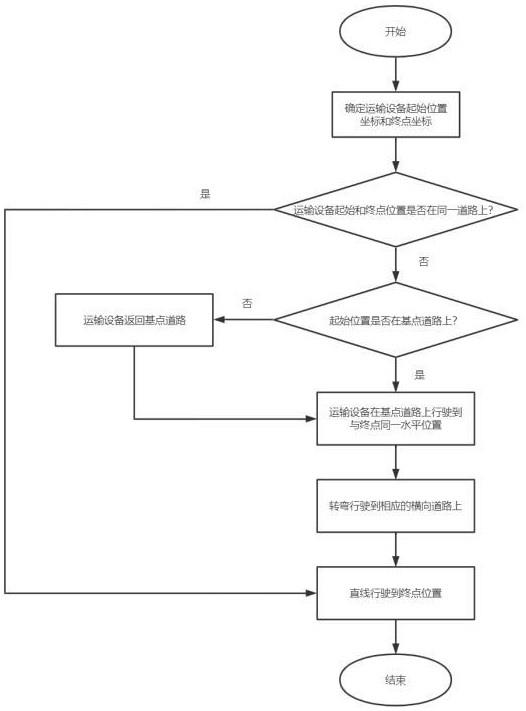
10、通过基点道路规划导航法对农业运输设备进行路径规划导航,以农场环境地图中左侧纵向连接所有横向道路的道路为基点道路,确定农业运输设备的位置和需要到达的终点后,判断农业运输设备的起始位置和终点是否在同一道路上,并判断起始位置是否在基点道路上;
11、当农业运输设备的起始位置与终点在同一条道路上时,则农业运输设备只需要完成直线行驶到达终点位置;
12、当农业运输设备的起始位置与终点不在同一条道路上,且农业运输设备的起始位置在基点道路上时,则农业运输设备在基点道路上行驶到与终点同一横向道路的水平位置后,再进行转弯行驶到相应的横向道路上,最终直线行驶到终点位置;
13、当农业运输设备的起始位置与终点不在同一条道路上,且农业运输设备的起始位置不在基点道路上时,则农业运输设备需要先返回基点道路,再在基点道路上行驶到与终点同一同一横向道路的水平位置后,再进行转弯行驶到相应的横向道路上,最终直线行驶到终点位置;步骤四:按照步骤三所述的导航策略为农业运输设备设置导航路线,完成对运输设备的导航规划,操作完成。
14、进一步的,步骤1中所述多个uwb定位模块的设置方式为:在农场环境中每间隔10米设置1个uwb模块作为定位参考节点,使10m×10m范围内至少有3个uwb模块;并通过网络时间协议ntp对所有uwb模块的时钟源进行校正,将多个uwb模块的时间保持一致。
15、进一步的,步骤1中所述的建立农场模型,具体操作方式为:在uwb定位基站的控制软件中建立二维直角坐标系作为参考系,以农场环境的左下角为原点,将至少3个uwb模块的位置被定位为u1,u2,u3,...,un,其位置坐标分别被记作(x1,y1),(x2,y2),(x3,y3),...,(xn,yn);将运输设备的uwb模块称为u0,位置坐标记为(x,y)。
16、进一步的,步骤2中所述的根据农业运输设备的位置信息,计算得到农业运输设备在农场模型中的位置信息,具体的操作方式为:
17、农业运输设备上的uwb定位标签对uwb定位基站发出请求信号,获取农业运输设备的位置信息;uwb定位基站通过参考节点u1,u2,u3,...,un的信息,结合tof飞行时间技术,计算u0分别到u1,u2,u3,...,un的直线距离d,具体公式如下:
18、
19、其中,d1,d2,d3,...,dn为u0分别到u1,u2,u3,...,un的直线距离,c为信号的传播速度,t为信号的飞行时间;
20、t=ti-t0-tp
21、其中,ti为信号接收到的时间,t0为信号发出时间,tp为信号处理时间;
22、以u1,u2,u3,...,un为圆心,u1,u2,u3,...,un分别与u0的距离d为半径画圆,多个圆的交集即u0的位置,通过u0和u1,u2,u3,...,un的距离d和u1,u2,u3,...,un位置坐标(x1,y1),(x2,y2),(x3,y3),...,(xn,yn)可计算出u0即运输设备坐标(x,y);计算公式为:
23、
24、由于测量误差的存在,定位圆并不会刚好交于一点,使用最小二乘法进行近似求解,根据上式,将前n-1个方程减去第n个方程,得到线性化方程ax=b,其中:
25、
26、
27、利用最小二乘法可以解得:
28、x=(ata)-1atb
29、其中,x为u0的坐标(x,y)。
30、进一步的,步骤2中所述的操控农业运输设备在农场环境中行驶,uwb定位基站记录农业运输设备在农场环境中的行驶轨迹,得到农场环境相关的地图;具体的操作方式为:人为的操控搭载uwb模块的农业运输设备绕农场环境的边界行驶,由uwb基站的控制软件记录农业运输设备的行驶轨迹,得到农场环境的范围;并操控农业运输设备在农场环境中内部的每条道路上行驶,记录农场环境中内可行驶的道路路线,使得控制软件得到农场环境的相关地图。
31、进一步的,步骤2中所述的对农业运输设备轨迹进行追踪,并保存对应的轨迹地图作为农业运输设备在农场环境中运行的栅格轨迹地图,具体的操作方式为:
32、在控制软件中设置:获取农业运输设备的位置信息的频率为0.1s/次,间隔0.1s获取并记录一次农业运输设备的位置坐标(x,y),对农业运输设备的运行轨迹进行跟踪;
33、由于农业运输设备的在实际行驶过程中并不能完全按照一条直线进行行驶,定位信息会出现摆动,导致轨迹出现扰动;在获取位置信息(x,y)后,选取该位置与相邻两个位置的yl,yr的中位数ymid代替该点的位置信息y,通过中位值进行滤波,克服行驶过程中出现的位置信息的偶然干扰;
34、y=median(yl,yr,y)
35、过滤掉偶然干扰后,通过最小二乘直线法将获取的位置信息进行拟合,绘制并保存拟合后的轨迹地图;以1m×1m为一个栅格,将轨迹地图划分为若干个栅格,形成栅格轨迹地图;
36、
37、
38、
39、
40、
41、其中,xi、yi为位置信息,a、b为拟合直线的参数;
42、将栅格轨迹地图坐标(xm,ym)与农业运输设备的位置坐标(x,y)进行联合标定,将栅格轨迹地图中的各个栅格和农场环境中的实际坐标对应;后期通过栅格轨迹地图的栅格坐标可对农业运输设备进行导航。
43、进一步的,步骤4所述的导航路线需确保农业运输设备严格按照创建的栅格轨迹地图进行行驶,避开农田,避免破坏农作物。
44、进一步的,步骤4所述的完成对运输设备的导航规划后,将导航规划传送至农业运输设备,农业运输设备根据规划路线进行运输作业;在运输作业时,当农业运输设备行驶到一个栅格之后,在本次任务中将该栅格设置为已到达状态,运输设备不能重复行驶已到达状态的栅格,只能在规划的导航路线上的未到达状态栅格上行驶,直到运输设备到达导航终点完成运输任务。
45、有益效果
46、本发明提出的一种用于农业运输设备的定位导航方法,与现有技术相比较,其具有以下有益效果:
47、(1)本发明在农场环境或大棚、温室等环境中设置uwb定位基站,并在农场环境中设置多个uwb定位模块,农业运输设备上安装有uwb定位标签,使用uwb多边定位对运输设备进行定位,通过调整定位信息获取的频率实现对运输设备的轨迹跟踪,获取设施内栅格地图信息,对超宽带多边定位技术进行改进,提高了运输设备在封闭环境下的定位精度。并通过地图信息和定位信息对运输设备的作业路径进行规划,实现农业运输设备农业内的定位导航。
48、(2)本发明通过二维栅格地图代替三维感知建图,可满足不同环境下的使用,操作逻辑简单,同时降低了成本。
- 还没有人留言评论。精彩留言会获得点赞!