激光雷达及可移动设备的制作方法
本技术涉及激光探测,尤其涉及激光雷达及可移动设备。
背景技术:
1、激光雷达是广泛用于自动驾驶场景中的核心传感器之一,可以用于收集外部环境的三维信息。激光雷达按照探测机制,主要可以分成飞行时间(tof)和调频连续波(fmcw)这两种激光雷达。fmcw激光雷达采用相干接收的方式,在接收端通过回波光与本振光进行相干探测,可以有效地减少外界环境光对激光雷达性能的干扰,提升激光雷达测距性能。同时,fmcw激光雷达在提供了空间坐标信息以外,还可以额外提供测速信息,因此被认为是下一代主流的激光雷达技术。
技术实现思路
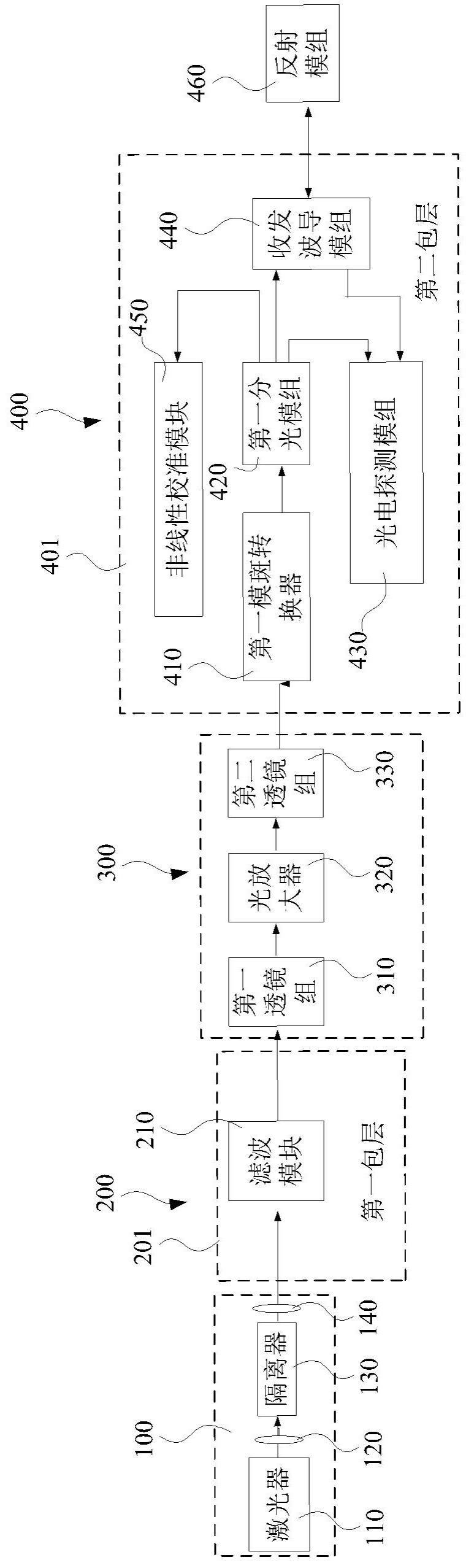
1、相关技术中,在光集成芯片实现收发一体功能的fmcw激光雷达中,光源模组生成的源光信号进入光集成芯片,并通过光集成芯片实现探测光的发射与回波光的接收;其中,源光信号耦合进入光集成芯片,并在光集成芯片传输的过程中,光信号的能量损耗较高。因此,fmcw激光雷达对光源模组的光功率的要求也较高,导致fmcw激光雷达的整机功耗较大。
2、本技术提供一种激光雷达及可移动设备,旨在改善相关技术中fmcw激光雷达对光源模组的光功率的要求较高的现状。
3、本技术第一方面提供一种激光雷达,所述激光雷达为调频连续波激光雷达,所述激光雷达包括:
4、光源模组,用于生成第一光束;
5、第一光芯片,包括第一包层与设于所述第一包层的滤波模块,所述滤波模块用于接收所述第一光束并滤波,以得到线宽较第一光束更窄的第二光束;以及
6、第二光芯片,包括第二包层、收发波导模组以及光电探测模组,所述收发波导模组与所述光电探测模组均设于所述第二包层,所述收发波导模组包括发射波导以及至少一个接收波导,所述发射波导用于传输并出射探测光,以探测目标物体,所述探测光为所述第二光束的至少部分,所述接收波导用于接收回波光,所述回波光为所述目标物体反射所述探测光形成,所述光电探测模组用于接收本振光与经由所述接收波导输出的回波光进行相干探测。
7、一种实施方式中,所述滤波模块包括微环谐振器。
8、一种实施方式中,所述微环谐振器包括第一信道波导、第二信道波导与微环波导,所述第一信道波导与所述第二信道波导之间相对设置,所述微环波导设于所述第一信道波导与所述第二信道波导之间,所述第一信道波导用于接收所述第一光束,所述第二信道波导用于输出所述第二光束。
9、一种实施方式中,所述光源模组包括激光器,所述激光器的线宽介于100khz~1mhz之间;
10、所述滤波模块包括微环谐振器,所述微环谐振器的线宽介于1khz~10khz之间。
11、一种实施方式中,所述第二光芯片包括第一分光模组;
12、所述第一分光模组包括第一输入端、第一输出端与至少一个第二输出端,所述第一分光模组用于经由所述第一输入端接收所述第二光束的至少部分,并分束为至少包括经由所述第一输出端输出的探测光,以及经由所述第二输出端输出的本振光;
13、所述第一输出端与所述发射波导连接,所述第二输出端与所述光电探测模组连接。
14、一种实施方式中,所述第二光芯片还包括:
15、第一模斑转换器;
16、所述第一模斑转换器设于所述第一分光模组的输入端的上游,用于接收所述第二光束的至少部分,以使所述第二光束的至少部分进入所述第二光芯片传输。
17、一种实施方式中,所述收发波导模组包括至少两接收波导,各所述接收波导之间沿所述第二方向间隔设置,且位于所述发射波导的同一侧;
18、所述光电探测模组包括至少两个光电探测模块,所述光电探测模块、所述第二输出端与所述接收波导一一对应连接,所述光电探测模块用于接收所述本振光以及经由所述接收波导输出的回波光。
19、一种实施方式中,所述光电探测模块包括:
20、光混频器,分别与所述第二输出端及所述接收波导连接,用于接收所述本振光以及所述回波光;以及
21、第一平衡光电探测器,与所述光混频器连接。
22、一种实施方式中,所述第二光芯片包括至少两个收发波导模组以及至少两个光电探测模组;
23、所述发射波导沿第一方向延伸,沿所述第二光芯片的厚度方向观察,同一收发波导模组中的所述接收波导与所述发射波导之间沿第二方向间隔设置,各所述收发波导模组之间沿所述第二方向错开设置,所述第一方向、所述第二方向与所述厚度方向中的任意两者垂直;
24、所述光电探测模组与所述收发波导模组一一对应设置;
25、所述激光雷达还包括至少两个反射模组,每一反射模组对应一所述收发波导模组,所述反射模组与所述收发波导模组之间沿所述第一方向相对设置,各所述反射模组之间沿所述第一方向错开设置。
26、一种实施方式中,所述第一光芯片包括第二分光模组,所述第二分光模组包括第二输入端与至少两个第四输出端,所述第二输入端与所述滤波模块连接;
27、所述第一光芯片用于经由所述第二输入端以接收所述第二光束,并分束为经由所述第四输出端输出的第三光束;
28、每一所述收发波导模组对应一所述第三光束。
29、一种实施方式中,还包括至少两个光放大模组,所述光放大模组设于所述第一光芯片与所述第二光芯片之间,所述光放大模组用于接收所述第三光束并进行放大,以使放大后的第三光束进入所述第二光芯片,每一所述光放大模组对应一所述第三光束。
30、一种实施方式中,所述第一光芯片还包括:
31、第二模斑转换器,设于所述滤波模块的输入端的上游,用于接收所述第一光束,以将所述第一光束耦合进入第一光芯片传输;
32、至少两个第三模斑转换器,设于所述第二分光模组的第四输出端的下游,用于将所述第二光束耦合输出至所述第一光芯片之外。
33、一种实施方式中,所述光源模组包括:
34、激光器,用于生成所述第一光束;
35、光隔离器,设于所述激光器与所述第一光芯片之间;
36、第一透镜,设于所述激光器与所述光隔离器之间,用于接收所述第一光束并聚焦,以使聚焦后的第一光束进入所述光隔离器;以及
37、第二透镜,设于所述光隔离器与第一光芯片之间,用于接收经由所述光隔离器输出的第一光束并聚焦,以使聚焦后的第一光束进入所述第一光芯片。
38、一种实施方式中,还包括:
39、壳体;所述光源模组、所述第一光芯片、所述第二光芯片及所述反射模组均设于所述壳体内。
40、本技术第二方面提供一种可移动设备,包括可移动的主体以及如上第一方面所述的激光雷达,所述激光雷达搭载于所述主体。
41、本技术提供的技术方案可以包括以下有益效果:
42、本实施例提供的方案,通过在第一光芯片中设置滤波模块,滤波模块能接收所述第一光束并滤波,得到线宽较第一光束更窄的第二光束,因此可以显著降低第一光束的线宽,并基于降低线宽后的第二光束进行探测,可以降低激光雷达对发射光功率的要求,即可以降低系统功耗,提升可靠性。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!