一种垃圾填埋场环境污染动态监测装置及其控制方法与流程
本发明属于环境检测领域,更具体地说,尤其涉及一种垃圾填埋场环境污染动态监测装置。同时,本发明还涉及一种垃圾填埋场环境污染动态监测的控制方法。
背景技术:
1、环境污染监测器是针对大气甲烷、硫化氢类污染物参数进行实时监控,从而有效的根据实时监控数据针对性的进行处理的装置。
2、现有的技术,大多是采用固定在某一存在污染环境的某一处的监测设备进行监测,导致无法第一时间根据监测数据发现污染释放点,同时,由于存在污染环境具有较大的范围,从其一点来监控全局的方式,其监测效果往往存在一定误差,因此,我们提出了一种垃圾填埋场环境污染动态监测装置及其控制方法。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种垃圾填埋场环境污染动态监测装置及其控制方法,利用无人机负载监测设备,对填埋场、工业园区存在污染的环境进行气质监测,结合gps定位及数据传输到云平台的方式,实现监测结果的可视化展示,方便直观看到污染情况,并且无人机能按照预设估计飞行或者水平高度的调整,能有效的对存在污染环境进行全方位多维度的数据监测。
2、为实现上述目的,本发明提供如下技术方案:
3、一种垃圾填埋场环境污染动态监测装置,包括:
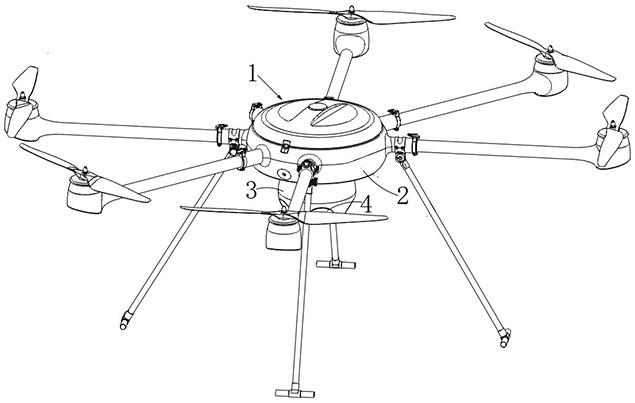
4、无人机以及无人机上搭载的气体检测设备;
5、所述无人机内置gps定位单元和交互单元,所述gps定位单元用于对无人机位置进行实时定位,所述交互单元与所述气体检测设备以及gps定位单元电性连接;
6、所述气体检测设备用于对无人机飞行环境内的污染性气体进行监测;
7、所述动态监测装置还包括:
8、云平台,所述云平台通过所述交互单元分别与gps定位单元、无人机以及气体检测设备形成交互,能将实现监测环境污染结果的可视化展示,方便直观看到污染情况;
9、同时,云平台接收gps定位单元发送的无人机实时坐标信息后,规划出无人机到达预订区域的最佳航线,并将该最佳航线数据传输至无人机的控制系统,无人机控制系统控制无人机按照该最佳航线飞入指定区域。
10、优选的,所述气体检测设备安装于所述无人机机体的下端,包括:
11、防护壳体,所述防护壳体内部分别集成有气体取样模块、试剂取样模块、检测模块;所述检测模块的信号输出端与所述交互单元连接;
12、所述气体取样模块的取样端位于防护壳体的外部,用于对环境空气进行取样;
13、所述试剂取样模块内置试剂储存腔,且所述试剂取样模块用于对试剂存储腔内试剂进行取样;
14、所述检测模块用于检测试剂和环境空气反应的物理量,并将数据传输至交互单元,通过交互单元将数据传输至云平台。
15、优选的,所述gps定位单元采用交互定位原理,卫星的距离由无线信号传播时间来测定,将传播时间乘上光速能求出距离,具体为:r=vt其中,无线信号传输速度为v=3×108m/s,无线信号传到地面时间为t;
16、gps定位单元具体定位方法采用观测值定位,根据宽巷观测值、窄巷观测值、消除电离层延迟的观测值来进行数据处理并进行观测值定位。
17、优选的,所述云平台包括:
18、无人机航线规划子系统以及环境污染结果可视化展示子系统;
19、所述无人机航线规划子系统,包括:
20、无人机的任务及航线规划单元,所述任务及航线规划单元根据航飞任务、无人机数量、航飞地理环境信息、航飞天数以及携带荷载类型,对无人机制定飞行路线并进行任务分配,包括如下规划流程:
21、1)任务分配,根据无人机自身性能和携带载荷的类型,协调无人机及其载荷资源之间的配合,以最短时间以及最小代价完成既定任务;
22、2)航线规划,基于避开限制风险区域以及油耗最小的原则,制定无人机的起飞、着陆、到达监测点、离开监测点、返航及应急飞行覆盖预定测区的任务过程的飞行航迹;
23、3)仿真演示,包括飞行仿真演示、环境威胁演示、监测效果显示;在地图模型上添加飞行路线,仿真飞行过程,检验飞行高度、油耗飞行指标的可能性;在地图模型上标志飞行禁区,使无人机在执行任务过程中避开这些区域;进行基于地图模型的合成图像计算,显示不同坐标与海拔位置上的地景图像,以便云平台人员为执行任务选取最佳方案。
24、优选的,所述地图模型将地理位置信息航迹规划的环境模型飞行区域设置为100m×100m×100m的直角坐标区域,障碍物区域建模采用山峰模型,其数学表达式为:
25、
26、式中:(xi,yi;)是第i个山峰的中心坐标;hi为地形的高度参数;xsi和ysi分别是第i个山峰沿着x轴和y轴的衰减量、控制坡度;n表示山峰总个数。
27、优选的,所述航线规划飞由第i个粒子位置点连接的直线段组成,路径上包含起点ps(xs,ys,zs)、终点pg(xg,yg,zg)和飞行路径上的其他粒子位置点pij(xij,yij,zij),其中,j=1,2,…,n,n为粒子位置点的个数,这些位置点及起点、终点共同组成飞行路径,路径由(ps,pi1,pi2,…,pin-i,pin,pg)组成,连接路径点后得到的飞行路径为一条折线,位置点为折线顶点;
28、根据路径找出平滑的飞行路径,采用三次b样条插值的方法,将间断的散点进行插值,并绘制出平滑的飞行路径曲线。
29、优选的,所述环境污染结果可视化展示子系统,包括:
30、数据处理模块以及展示模块;
31、所述数据处理模块用于将所述气体检测设备的检测数据转换为三维可视化数据,并将所述三维可视化数据传输至展示模块;
32、所述展示模块,用于将所述三维可视化数据在3d地图上可视化显示;
33、所述气体检测设备的检测数据转换为三维可视化数据,包括:将空气质量数据转化为像素矩阵并进行数据填充,最后得到所述三维可视化数据,所述三维可视化数据包括至少一个数据点,所述数据点包含对应的三维坐标和数据值,所述数据值具有相应的空气污染等级;
34、所述数据填充包括:对预设区域内的空气质量数据进行填补,直至预设区域内的空气质量数据填补完毕。
35、一种垃圾填埋场环境污染动态监测的控制方法,包括如下步骤:
36、云平台接收gps定位单元传输的无人机位置信息,并根据目标区域信息制定无人机最佳飞行航线;
37、无人机到达目标区域,通过无人机搭载的气体检测设备对该目标区域的不同水平高度进行取样分析;
38、交互模块接收到气体检测设备的分析数据,向云平台传输该分析数据;
39、云平台接收到分析数据通过内置的环境污染结果可视化展示子系统进行立体化展示。
40、优选的,所述气体检测设备对该目标区域的不同水平高度进行取样分析时,无人机悬停在设定高度进行采集,所述无人机悬停通过超声波传感器、气压计以及gps定位单元来测量高度,水平位置的坐标则由gps定位单元模块来确定。
41、本发明的技术效果和优点:本发明与传统的固态产品相比,利用无人机负载监测设备,对填埋场、工业园区存在污染的环境进行气质监测,结合gps定位及数据传输到云平台的方式,实现监测结果的可视化展示,方便直观看到污染情况,并且无人机能按照预设估计飞行或者水平高度的调整,能有效的对存在污染环境进行全方位多维度的数据监测;
42、其次,本发明通过云平台对无人机的航线记性规划,并采用仿真演示的方式对环境内可能存在的威胁、飞行高度、油耗飞行指标进行演示,有效的确保了无人机的飞行作业,同时也能确保无人机在飞行时为最佳飞行轨迹。
- 还没有人留言评论。精彩留言会获得点赞!