定位方法、装置、电子设备、存储介质及程序产品与流程
本技术实施例涉及互联网领域,涉及但不限于一种定位方法、装置、电子设备、存储介质及程序产品。
背景技术:
1、随着计算机技术和通信技术的发展,自动驾驶也得到了快速的发展。在自动驾驶过程中,车辆的自动驾驶模块需要对车辆当前所处位置进行准确的实时定位,从而基于定位结果来作出下一步驾驶策略的预测。
2、相关技术中,在实时定位过程中,是通过传统的图像识别方法或机器学习的方法,提取出所拍摄的车辆前方图像中的车道线、箭头、车辆等信息(后面统称为目标)。在识别到目标后,需要将目标还原到现实世界中,从而计算目标与相机的相对位置,从而实现对车辆进行定位。
3、但是,相关技术中的定位方法,计算出的目标相对相机的坐标会存在较大的误差,从而导致定位的准确性较低。
技术实现思路
1、本技术实施例提供一种定位方法、装置、电子设备、存储介质及程序产品,至少能够应用于地图领域或交通领域中,可以结合目标车辆当前行驶道路的道路数据,准确的计算出计算目标与相机的相对位置,从而提高实时定位的准确性。
2、本技术实施例的技术方案是这样实现的:
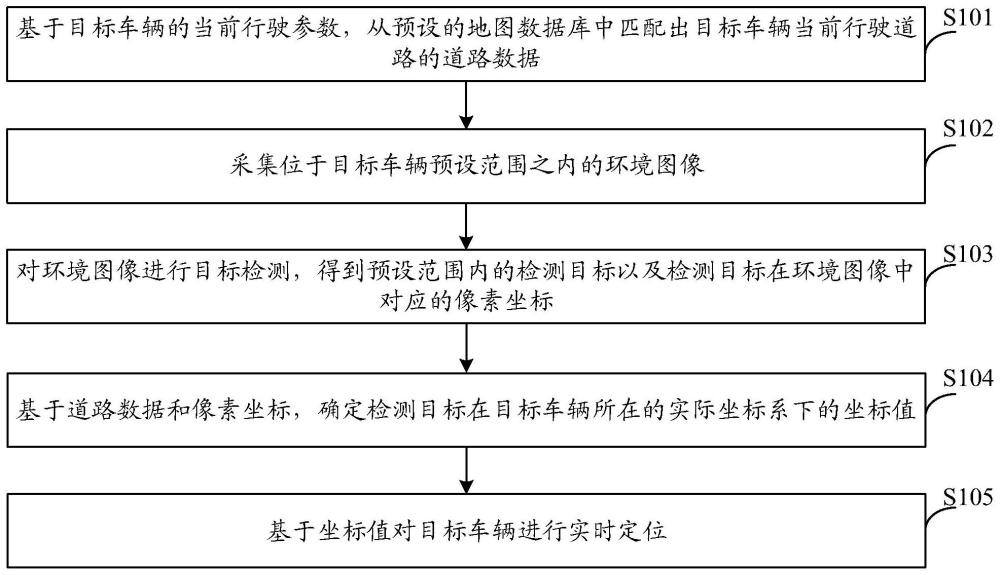
3、本技术实施例提供一种定位方法,包括:基于目标车辆的当前行驶参数,从预设的地图数据库中匹配出所述目标车辆当前行驶道路的道路数据;采集位于所述目标车辆预设范围之内的环境图像;对所述环境图像进行目标检测,得到所述预设范围内的检测目标以及所述检测目标在所述环境图像中对应的像素坐标;基于所述道路数据和所述像素坐标,确定所述检测目标在所述目标车辆所在的实际坐标系下的坐标值;基于所述坐标值对所述目标车辆进行实时定位。
4、本技术实施例提供一种定位装置,包括:匹配模块,用于基于目标车辆的当前行驶参数,从预设的地图数据库中匹配出所述目标车辆当前行驶道路的道路数据;图像采集模块,用于采集位于所述目标车辆预设范围之内的环境图像;目标检测模块,用于对所述环境图像进行目标检测,得到所述预设范围内的检测目标以及所述检测目标在所述环境图像中对应的像素坐标;确定模块,用于基于所述道路数据和所述像素坐标,确定所述检测目标在所述目标车辆所在的实际坐标系下的坐标值;实时定位模块,用于基于所述坐标值对所述目标车辆进行实时定位。
5、在一些实施例中,所述匹配模块还用于:获取所述目标车辆的当前行驶参数;所述当前行驶参数包括所述目标车辆的行驶位置、行驶姿态和行驶速度;从所述地图数据库中确定与所述行驶位置、所述行驶姿态和所述行驶速度对应的当前行驶道路;从所述地图数据库中获取所述当前行驶道路的道路数据。
6、在一些实施例中,所述匹配模块还用于:通过卫星传感设备获取所述目标车辆在当前时刻的所述行驶位置;通过惯性测量设备获取所述目标车辆在当前时刻的所述行驶姿态;通过速度传感设备获取所述目标车辆在当前时刻的所述行驶速度。
7、在一些实施例中,所述匹配模块还用于:通过预设的机器学习算法,基于所述行驶位置、所述行驶姿态和所述行驶速度,从所述地图数据库中进行信息匹配,得到所述目标车辆的当前行驶道路的道路标识;其中,所述机器学习算法包括隐马尔科夫模型对应的机器学习算法。
8、在一些实施例中,所述道路数据包括所述当前行驶道路的坡度信息和所述当前行驶道路的经纬度信息;所述装置还包括:转换模块,用于基于所述目标车辆的所述行驶位置和所述行驶姿态,将所述经纬度信息转换到所述实际坐标系下,得到转换后的经纬度信息;所述实时定位模块还用于:基于所述转换后的经纬度信息对所述目标车辆进行第一定位精度的实时定位;在所述第一定位精度的实时定位结果的基础上,基于所述坐标值对所述目标车辆进行第二定位精度的实时定位;所述第二定位精度大于所述第一定位精度。
9、在一些实施例中,所述图像采集模块还用于:通过所述目标车辆上的图像采集设备采集位于所述目标车辆预设范围之内的环境图像;其中,所述目标车辆所在的实际坐标系是与所述图像采集设备对应的坐标系;在所述实际坐标系中,所述图像采集设备的中心位于所述实际坐标系的原点,所述图像采集设备的光心方向为所述实际坐标系的第一坐标轴方向,沿所述图像采集设备的中心开始延伸且垂直于水平面的方向为所述实际坐标系的第二坐标轴方向,垂直于所述第一坐标轴方向和所述第二坐标轴方向的方向为所述实际坐标系的第三坐标轴方向。
10、在一些实施例中,所述道路数据包括所述当前行驶道路的坡度信息;所述确定模块还用于:获取所述图像采集设备的内部参数;基于所述内部参数和所述像素坐标,构建用于求解所述实际坐标系下的坐标值的第一方程式;基于所述当前行驶道路的坡度信息,构建用于求解所述实际坐标系下的坐标值的第二方程式;基于所述第一方程式和所述第二方程式进行参数求解,得到所述实际坐标系下的坐标值。
11、在一些实施例中,所述确定模块还用于:对所述图像采集设备的参数标定,得到所述图像采集设备的内部参数。
12、在一些实施例中,所述确定模块还用于:基于所述内部参数和所述像素坐标,构建所述第一方程式为以下公式(1):
13、
14、其中,(xc,yc,zc)表示所述检测目标在所述实际坐标系下的坐标值;(u,v)表示所述检测目标在所述环境图像中对应的像素坐标;fx和fy均表示所述图像采集设备的内部参数。
15、在一些实施例中,所述当前行驶道路的坡度信息包括所述当前行驶道路与水平面之间形成的坡角;所述确定模块还用于:基于所述当前行驶道路的坡度信息,构建所述第二方程式为以下公式(2):
16、
17、其中,h表示所述图像采集设备距离所述目标车辆所在地面的高度;β表示所述坡角。
18、在一些实施例中,所述装置还包括:结果获取模块,用于获取当前时刻下的实时定位结果;所述实时定位结果用于表征所述目标车辆在所述当前行驶道路上的实时位置;策略生成模块,用于基于所述实时位置生成针对所述目标车辆的驾驶策略和与所述驾驶策略对应的控制指令;控制模块,用于向所述目标车辆发送所述控制指令,通过所述目标车辆的自动驾驶模块响应于所述控制指令,控制所述目标车辆按照所述驾驶策略进行自动驾驶。
19、本技术实施例提供一种电子设备,包括:存储器,用于存储可执行指令;处理器,用于执行所述存储器中存储的可执行指令时,实现上述的定位方法。
20、本技术实施例提供一种计算机程序产品,该计算机程序产品包括可执行指令,可执行指令存储在计算机可读存储介质中;其中,电子设备的处理器从计算机可读存储介质中读取可执行指令,并执行可执行指令时,实现上述的定位方法。
21、本技术实施例提供一种计算机可读存储介质,存储有可执行指令,用于引起处理器执行所述可执行指令时,实现上述的定位方法。
22、本技术实施例具有以下有益效果:
23、在对目标车辆进行实时定位时,是基于目标车辆的当前行驶参数,从预设的地图数据库中匹配出目标车辆当前行驶道路的道路数据,并且,对目标车辆预设范围内的环境图像进行目标检测,从而基于道路数据和检测目标的像素坐标,确定检测目标在目标车辆所在的实际坐标系下的坐标值,即计算出检测目标与目标车辆之间实际的相对位置关系。如此,实现了结合目标车辆当前行驶道路的道路数据,准确的计算出计算检测目标与目标车辆之间的相对位置,通过该相对位置能够极大的提高实时定位的准确性。
- 还没有人留言评论。精彩留言会获得点赞!