一种激光雷达码盘校准细分方法、装置及计算机系统与流程
本发明涉及激光雷达技术,特别是涉及一种激光雷达码盘校准细分方法、装置及计算机系统。
背景技术:
1、激光雷达以其扫描形制可分为三类,即机械转扫、振镜扫描和光学相控阵。其中机械转扫的激光雷达为实现角度定位,通常采用光电编码器实现扫描角度的测量与控制。光电编码器上通常包括码盘和读码器,读码器又由光源和光电传感器组成。
2、基于光源与码盘相互作用的机理不同,光电编码器又可分为反射式和透射式两类。基于码盘的形制不同,光电编码器又可分为增量编码和绝对编码两类。在机械转扫激光雷达的实际实现方案中,通常采用透射式增量光电编码或反射式增量光电编码。
3、为确保扫描角度精准,测量轮廓的还原度高,要求增量码盘上的栅/齿具有较高的均匀度,在实际应用过程中,由于加工精度不够和安装定位偏差,码盘的栅/齿并不能实现扫描的精确角定位。栅/齿自身宽度的不一致、栅/齿间距离的不一致以及码盘整体安装的偏心,都可造成标识角度与真实扫描角度的偏差。
4、在现有结构紧凑的激光雷达中,受限于码盘外形尺寸及栅/齿密度的加工极限,在无法做到一个栅/齿对应一个测距激光脉冲的前提下,为进一步提升雷达扫描的角分辨率,常采用码盘分码策略,即在相邻栅/齿对应的扫描角度间,发射等角度间隔的多个测距激光脉冲。由此又引入了电机的转速稳定性的变量,如果电机转速不稳定,忽快忽慢,导致读码器读出的相邻栅/齿间隔时间起伏不定,以固定时间间隔为依据的码盘分码无法实现激光脉冲对应角度的均匀性,叠加码盘加工及安装定位偏差的问题,使得最终扫描测距获得的点云图像与真实被测目标轮廓不匹配,出现扭曲、畸变等图像失真。
5、为克服以上问题,现有的应对策略是提升码盘的加工及装配精度,优选和优化控制电机,降低转速不稳定性。但都不能从根本上解决问题,同时以上做法也进一步增加了雷达的生产成本,不利于批量化生产。
技术实现思路
1、本发明的目的是为了克服上述背景技术的不足,提供一种激光雷达码盘校准细分方法、装置及计算机系统,使其有效提升码盘精度指标,解决了码盘的栅齿加工误差及安装偏差造成的角度定位误差,避免了校准环节电机转数不稳导致的校准误差。
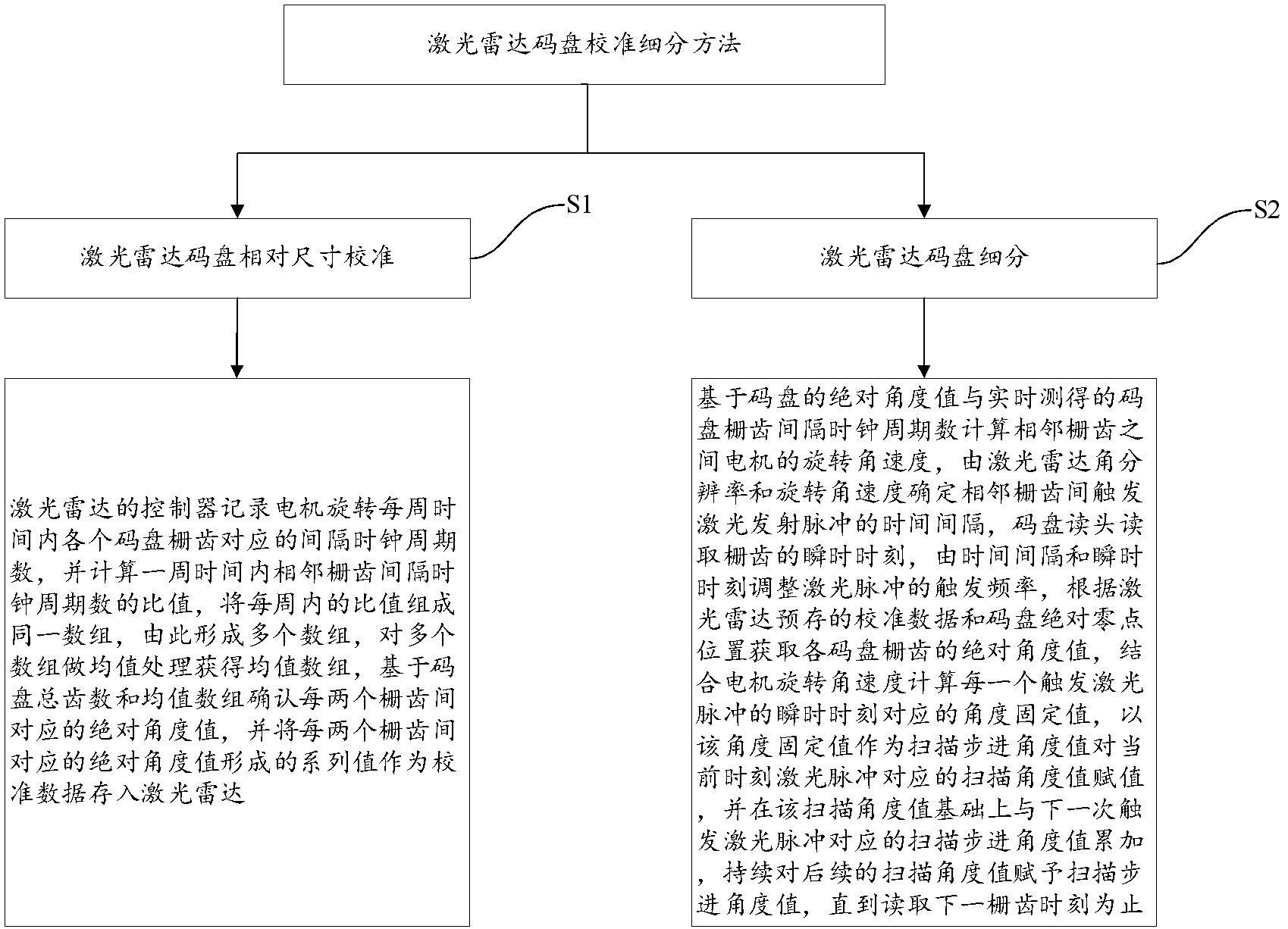
2、本发明提供的一种激光雷达码盘校准细分方法,包括激光雷达码盘相对尺寸校准和激光雷达码盘细分两部分,具体内容如下:s1、激光雷达码盘相对尺寸校准:激光雷达的控制器记录电机旋转每周时间内各个码盘栅齿对应的间隔时钟周期数,并计算一周时间内相邻栅齿间隔时钟周期数的比值,将每周内的比值组成同一数组,由此形成多个数组,对多个数组做均值处理获得均值数组,基于码盘总齿数和均值数组确认每两个栅齿间对应的绝对角度值,并将每两个栅齿间对应的绝对角度值形成的系列值作为校准数据存入激光雷达;s2、激光雷达码盘细分:基于码盘的绝对角度值与实时测得的码盘栅齿间隔时钟周期数计算相邻栅齿之间电机的旋转角速度,由激光雷达角分辨率和旋转角速度确定相邻栅齿间触发激光发射脉冲的时间间隔,码盘读头读取栅齿的瞬时时刻,由时间间隔和瞬时时刻调整激光脉冲的触发频率,根据激光雷达预存的校准数据和码盘绝对零点位置获取各码盘栅齿的绝对角度值,结合电机旋转角速度计算每一个触发激光脉冲的瞬时时刻对应的角度固定值,以该角度固定值作为扫描步进角度值对当前时刻激光脉冲对应的扫描角度值赋值,并在该扫描角度值基础上与下一次触发激光脉冲对应的扫描步进角度值累加,持续对后续的扫描角度值赋予扫描步进角度值,直到读取下一栅齿时刻为止。
3、在上述技术方案中,所述激光雷达码盘相对尺寸校准的步骤如下:s11、利用激光雷达的控制器,记录激光雷达电机旋转一周时间内读头读取各个相邻的码盘栅齿对应的间隔时钟周期数c1、c2……cn,其中c1对应第一个栅齿与第二个栅齿之间对应的时钟周期数,cn对应第n个栅齿与第n+1个栅齿之间对应的时钟周期数;s12、计算相邻栅齿间隔时钟周期数的比值,分别计为k1、k2……kn,其中k1=c2/c1,……kn=cn+1/cn;将k1、k2……kn记为数组a1,即a1=[k1,k2……kn];s13、重复步骤s11和步骤s12,记录激光雷达电机在其他时间旋转一周时间内对应的相邻栅齿间隔时钟周期数的比值,分别获得数组a2,a3……am;s14、对a1,a2……am做均值处理,得到均值数组,;s15、依据码盘的总齿数和均值数组确认相邻栅齿间对应的绝对角度值,并将每两个栅齿间对应的绝对角度值形成的系列值作为校准数据存入激光雷达,完成激光雷达码盘栅齿相对间隔的校准。
4、在上述技术方案中,所述步骤s14中,所述均值处理的过程如下:将每个数组中对应的比值累加求和除以m得到该比值的均值,再将各比值均值组成均值数组,即计算过程如下:,……,再将、……记为数组,即=[,……]。
5、在上述技术方案中,所述步骤s15中,将相邻栅齿间对应的系列角度值作为校准数据存入激光雷达后,在已知码盘绝对零点对应位置的前提下,计算获取各码盘栅齿的绝对角度值,并将各码盘栅齿的绝对角度值作为校准数据存入激光雷达。
6、在上述技术方案中,激光雷达码盘细分的步骤如下:s21、利用码盘读头读取码盘当前栅齿与前若干个临近栅齿,基于激光雷达的控制器得到对应的临近栅齿间隔时钟周期数;s22、基于当前栅齿的前若干个临近栅齿间隔时钟周期数以及码盘校准数据分别计算该前若干个临近栅齿中每个栅齿至下一个栅齿之间电机的计算旋转角速度,并根据获得的若干个计算旋转角速度推算当前栅齿至下一个栅齿之间电机的推算旋转角速度;s23、依据激光雷达的角分辨率和推算旋转角速度,计算当前栅齿至下一个栅齿之间触发两个激光脉冲的当前时间间隔△tn;s24、码盘读头读取码盘当前栅齿的当前瞬时时间tn,在获取前一个栅齿至当前栅齿之间触发激光脉冲的前一时间间隔△tn-1的基础上,当下一个激光脉冲触发后,时间间隔调整为当前时间间隔△tn,码盘读头读取经过调整的调整时间间隔瞬时时间tn’,在tn’+△tn时刻触发下一个激光脉冲发射;s25、根据校准环节确认的各栅齿对应的绝对角度值、当前瞬时时间tn和调整时间间隔瞬时时间tn’之间可采集的激光雷达系统时钟数、电机的若干个计算旋转角速度,计算获得时间间隔瞬时时间tn’触发激光脉冲对应的角度固定值,以该角度固定值作为当前时刻激光脉冲对应的扫描步进角度值,以与当前时刻激光脉冲对应的扫描角度值作为基础值,以扫描步进角度值为累加项,通过累加的方式依此获得后续激光脉冲的扫描角度值,直至读取到下一栅齿时刻为止。
7、在上述技术方案中,所述步骤s22中,所述推算旋转角速度的推算方法为根据获得的若干个计算旋转角速度进行一阶线性拟合,从而得到推算旋转角速度。
8、在上述技术方案中,所述步骤s22中,所述一阶线性拟合是旋转角速度值的等差近似。
9、在上述技术方案中,所述步骤s24中,在当前瞬时时间tn到调整时间间隔瞬时时间tn’读取码盘的这段时间内可依激光雷达系统硬件处理能力调整触发激光脉冲的个数。
10、本发明又提供了一种激光雷达码盘校准细分装置,包括计算机程序,该计算机程序能够执行激光雷达码盘校准细分方法。
11、本发明还提供了一种计算机系统,该计算机系统包括激光雷达码盘校准细分装置。
12、本发明激光雷达码盘校准细分方法、装置及计算机系统,具有以下有益效果:
13、1、利用高精度的系统内部时钟校准相对低精度的码盘,可有效提升码盘精度指标;
14、2、通过对激光雷达整体运行下的码盘做校准,可同时解决由于码盘的栅齿加工误差及安装偏差造成的角度定位误差;
15、3、以相邻栅齿间隔时钟周期数的比值作为标校对象数据,有效避免了校准环节电机转速不稳导致的校准误差;
16、4、经过角度校准后的激光雷达在码盘细分环节引入了转速预估方法,可有效应对雷达工作过程电机转速的起伏,确保雷达扫描角度的均匀性(激光脉冲指向角度间隔相对恒定)与准确性(每个激光脉冲指向角度的绝对值准确),有效避免了点云图像扭曲、畸变等图像失真问题的发生。
- 还没有人留言评论。精彩留言会获得点赞!