一种车辆水平旋转角速度获取方法与流程
本发明涉及智能汽车辅助技术,属角速度测量,具体涉及一种车辆水平旋转角速度获取方法。
背景技术:
1、车辆水平旋转角速度是车辆轨迹解算及导航控制的重要参数,特别是车辆行驶于隧道、地下等无卫星信号区域时,车辆的导航定位需要车辆水平旋转角速度等参数进行轨迹解算。而车辆水平旋转角速度通常采用专用陀螺仪进行测量,但并非所有车辆均安装陀螺仪,且陀螺仪成本较高,安装调试较为复杂。
2、针对这一问题,本发明提出了一种车辆水平旋转角速度获取方法,以解决现有技术存在的不足。经检索,未发现与本发明相同或相似的技术方案。
技术实现思路
1、本发明目的是:提供一种车辆水平旋转角速度获取方法,以解决现有技术中车辆旋转角速度较难精准获取的问题。
2、本发明的技术方案是:一种车辆水平旋转角速度获取方法,具体步骤如下:
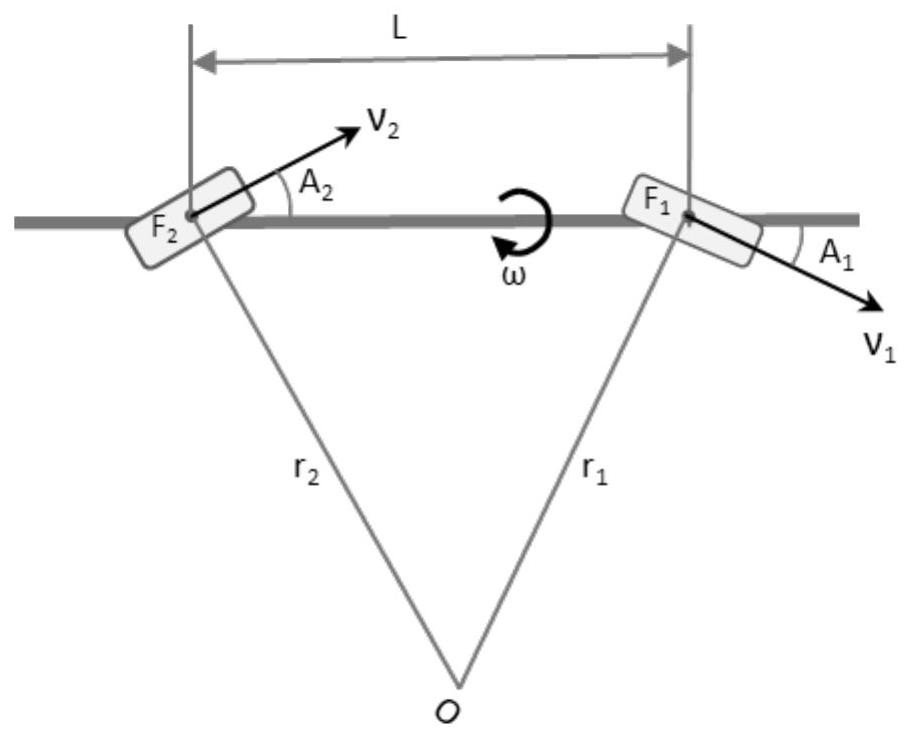
3、定义车辆的速度瞬心为o,前轴中心点为f1,后轴中心点为f2,f1速度为ν1,f2速度为ν2,轴距为l,线段f1f2=l,前轮转角为a1,后轮转角为a2;根据车辆运动学原理,在某一瞬时,f1和f2绕速度瞬心o旋转,且旋转角速度等于车辆水平旋转角速度ω;
4、基于三角关系,三角形of1f2中,∠o=a1+a2,∠of1f2和∠of2f1分别与a1和a2互为余角;基于上述几何关系,可解算车辆水平旋转角速度ω:
5、ω=ν1sin(a1+a2)/lcosa2,
6、或
7、ω=ν2sin(a1+a2)/lcosa1。
8、前后车轴的速度及车轮转角均可以通过相应的速度测量装置及车轮转角测量装置获得。
9、优选的,当车辆仅前轴为转向轴,后轴为非转向轴时,该车辆水平旋转角速度ω计算方法为:
10、ω=ν1sina1/l,
11、或
12、ω=ν2tana1/l。
13、本发明提供了一种基于各车轴的速度及车轮转角的车身的旋转角速度解算方法;无需陀螺仪等角速度专门测量传感器件,可为车辆的轨迹解算及智能控制提供基础参数。
技术特征:
1.一种车辆水平旋转角速度获取方法,其特征在于,具体步骤如下:
2.基于权利要求1一种车辆水平旋转角速度获取方法,其特征在于,当车辆仅前轴为转向轴,后轴为非转向轴时,该车辆水平旋转角速度ω计算方法为:
技术总结
本发明涉及一种车辆水平旋转角速度获取方法,基于前后车轴的速度及车轮转角,分别解算前后车轴中心点的旋转半径,依据速度与角速度的物理关系,可推算出车辆的水平旋转角速度。该车辆水平旋转角速度可作为智能车辆轨迹解算及导航控制的重要参数。
技术研发人员:刘滨,谢树楠,黄超,张娜思,郭洁琼
受保护的技术使用者:苏州码卓智能科技有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!