一种液压足式机器人腿部位移/力传感器标定装置及方法
本发明涉及足式机器人传感器标定领域,特别是一种液压足式机器人腿部位移/力传感器标定装置及方法。
背景技术:
1、液压足式机器人是常见移动机器人之一,具有负重能力大、爆发能力强等优势。该型机器人关节驱动器通常为伺服阀控液压缸结构形式,简称液压驱动单元。为了实现机器人的高性能运动控制,以提高其对不同地面环境的适应性,需对机器人进行位置和力控制。因此,液压足式机器人腿部的液压驱动单元通常集成了位移传感器和力传感器。
2、液压足式机器人的移动依赖于机器人腿部各关节液压驱动单元的运动,为了确保机器人腿部关节液压驱动单元能按照顶层运动规划精确地执行动作(包括位置和力),以实现机器人的期望运动,需对机器人腿部各关节液压驱动单元的位移传感器和力传感器进行标定。
3、传感器在出厂时已完成标定,用户可以根据传感器说明书中的量程与电压/电流对应关系确定标定系数,完成传感器的标定。但是,传感器在长时间使用后,由于摩擦力、预紧力等因素的影响,传感器的检测值和实际值之间会存在一定的误差,此时需要对传感器进行重新标定。传统的标定方法首先需要将传感器从机器人腿部拆下,然后在相应的传感器标定实验台上标定,最后再将传感器装到机器人腿上。上述传统标定方法存在以下两方面不足:①标定步骤繁琐,传感器标定需对机器人进行拆装并对每个传感器依次标定,且位置传感器和力传感器的标定均需要用到特定的标定装置;②拆装易影响机器人控制性能,机器人腿部关节各零件间大多采用过盈配合,频繁拆装易改变机器人关节的配合关系,影响机器人的控制性能。
4、综上所述,如何在不拆卸机器人腿情况下,提供一种便于液压足式机器人腿部位移/力传感器标定的装置及方法,实现对液压足式机器人腿部位移/力传感器的精确标定,成为本领域技术人员需要解决的问题。
技术实现思路
1、本发明目的在于针对现有技术的不足,提出一种液压足式机器人腿部位移/力传感器标定装置及方法。该标定装置能在不拆装机器人腿情况下,完成机器人腿部位移传感器和力传感器的标定,且适用于腿部2-3自由度的液压足式机器人。该标定方法可以准确快速地求解出机器人腿部各关节液压驱动单元的位移/力传感器的标定系数。
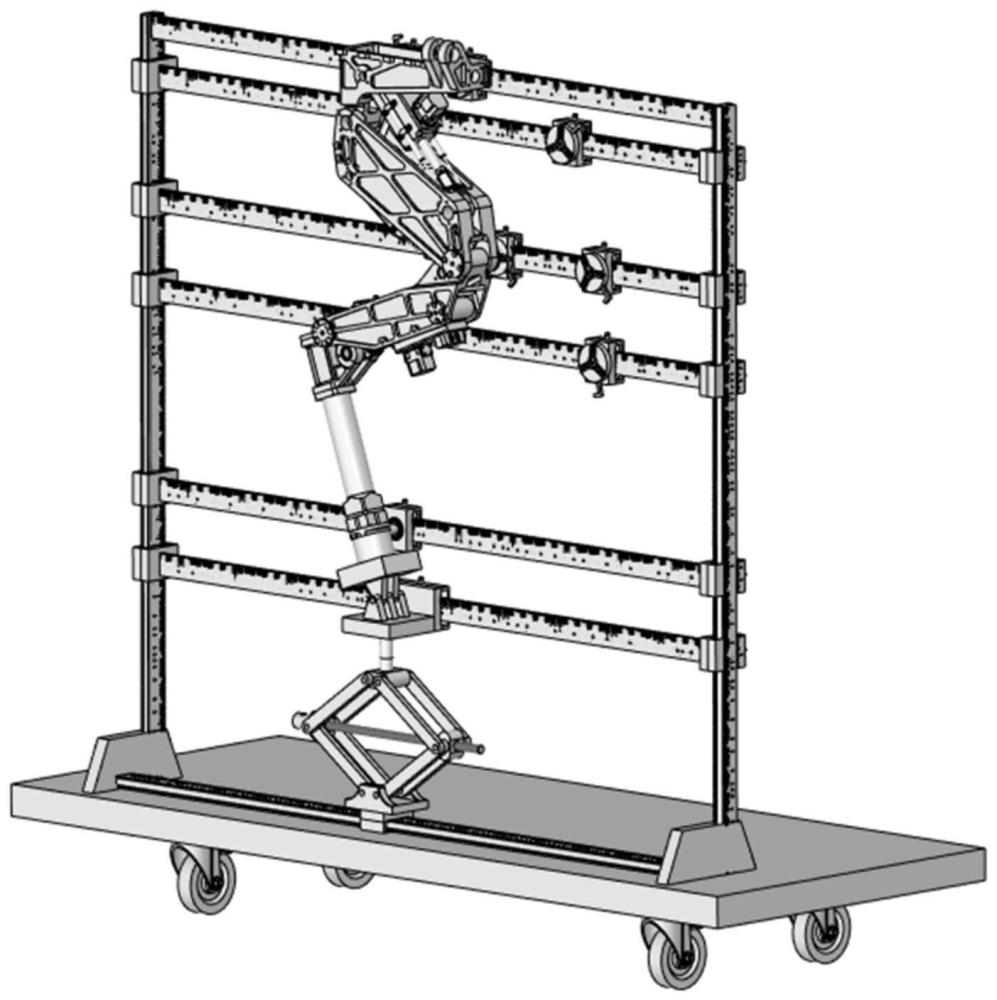
2、本发明的目的是通过以下技术方案来实现的:一种液压足式机器人腿部位移/力传感器标定装置,该装置包括基座框架、竖直标尺、水平固定标尺、水平定位标尺、关节定位模块、足端受力检测模块和足端施力平衡模块;
3、所述竖直标尺垂直固定在基座框架上,竖直标尺的边缘设置有滑槽;所述水平固定标尺固定在竖直标尺的顶部;
4、所述水平定位标尺的边缘设置有滑槽,滑动连接在竖直标尺上,能够沿竖直方向移动,并通过锁紧螺栓固定在竖直标尺上;
5、所述关节定位模块滑动连接在水平固定标尺或水平定位标尺上,并沿水平方向移动,关节定位模块能够通过锁紧螺栓固定在水平固定标尺或水平定位标尺上;
6、所述足端受力检测模块滑动连接在水平定位标尺上,并沿水平方向移动,能够通过锁紧螺栓固定在水平定位标尺上;
7、所述足端施力平衡模块滑动连接在基座框架的底部滑轨上,并沿水平方向移动,足端施力平衡模块能够通过锁紧螺栓固定在基座框架的底部滑轨上。
8、进一步地,所述基座框架由底部滑轨、底板和万向轮组成;四个万向轮固定在底板的底部,底部滑轨固定在底板的上部。
9、进一步地,所述竖直标尺共有两根且对称分布在基座框架上,竖直标尺上有竖直标尺刻度,竖直标尺刻度由分度值为1mm的刻度线组成。
10、进一步地,所述水平固定标尺上有水平标尺刻度,水平标尺刻度由分度值为1mm的刻度线组成。
11、进一步地,所述水平定位标尺由水平定位标尺横梁、标尺滑块和锁紧螺栓组成;水平定位标尺横梁上有分度值为1mm的水平标尺刻度;标尺滑块为矩形结构,边缘有定位孔,对称安装在水平定位标尺横梁的两端,标尺滑块能够在竖直标尺上沿竖直方向上下滑动,并且通过锁紧螺栓固定在竖直标尺上,标尺滑块上有分度值为0.98mm的刻度线。
12、进一步地,所述关节定位模块包括直线滑块、锁紧螺栓、圆柱滚子轴承、卡盘、卡爪和卡爪锁紧钥匙;直线滑块与水平定位标尺线性配合,直线滑块与圆柱滚子轴承同轴配合,直线滑块上有分度值为0.98mm的刻度线,直线滑块与锁紧螺栓螺纹配合;关节定位模块通过锁紧螺栓固定在水平定位标尺上,圆柱滚子轴承与卡盘同轴配合,卡爪与卡盘线性配合,卡爪在卡盘的轨道上滑动,卡爪锁紧钥匙与卡盘螺纹配合。
13、进一步地,所述足端受力检测模块包括传感器直线滑块、锁紧螺栓、传感器平台和二维力传感器;传感器直线滑块在水平定位标尺上水平滑动,传感器直线滑块上有分度值为0.98mm的刻度线,传感器直线滑块与锁紧螺栓螺纹配合;足端受力检测模块通过锁紧螺栓固定在水平定位标尺上,传感器平台与传感器直线滑块铰接,二维力传感器固定在传感器平台上。
14、进一步地,所述足端施力平衡模块包括施力锁紧部件和底部直线滑块;施力锁紧部件的底端与底部直线滑块的顶端固定连接,底部直线滑块在基座框架的底部滑轨上水平滑动。
15、进一步地,在所述液压足式机器人腿部位移/力传感器标定装置中,读取不同状态下机器人足端的位置及受力,通过运动学反解和静力学反解求取相应状态下各关节伺服阀控缸的输出位移和力,并通过待定系数法求出各关节位移传感器和力传感器的标定系数。
16、另一方面,本发明还提供了一种利用液压足式机器人腿部位移/力传感器标定装置的标定方法,该方法包括以下步骤:
17、(1)标定准备,将液压足式机器人腿部与标定装置相对连接,具体包括:
18、(1-1)根据液压足式机器人腿部关节结构,调节关节定位模块进行卡紧,并确保机器人腿部平面与标定装置平行;
19、(1-2)将液压足式机器人足端与标定装置的二维力传感器固定连接;
20、(2)根据机器人运动学,标定液压足式机器人腿部位移传感器,具体包括:
21、(2-1)通过标定装置读取液压足式机器人足端坐标,根据机器人运动学计算机器人各关节角度,并计算机器人各关节位移传感器的实际值;
22、(2-2)利用电压/电流测量装置,检测机器人各关节位移传感器输出电压值/电流值;
23、(2-3)改变液压足式机器人足端位置,重复(2-1)-(2-2)操作,记录n组位移传感器实际值及其对应电压/电流的数据;
24、(2-4)基于n组测量数据,采用待定系数法计算组位移传感器标定系数,并以其平均值作为实际标定系数对位移传感器进行标定;
25、(3)根据机器人静力学,标定液压足式机器人腿部力传感器,具体包括:
26、(3-1)基于标定好的位移传感器,对机器人腿部进行位置控制,将机器人足端运动到某点,并通过足端受力平衡模块对机器人腿部施加力,且确保机器人腿部保持静止和平衡;
27、(3-2)通过足端受力检测模块检测机器人足端所受x-y两方向的力,根据机器人静力学计算机器人各关节力矩,并计算机器人各关节力传感器的实际值;
28、(3-3)利用电压/电流测量装置,检测机器人各关节力传感器输出电压值/电流值;
29、(3-4)改变液压足式机器人足端位置,重复(3-1)-(3-3)步骤,记录m组力传感器实际值及其对应电压/电流的数据;
30、(3-5)基于m组测量数据,采用待定系数法计算组位移传感器标定系数,并以其平均值作为实际标定系数对力传感器进行标定。
31、本发明的有益效果:本发明标定装置造价经济低廉,标定方法简单且易操作,能够满足液压足式机器人腿部位移传感器和力传感器的快速标定。该标定装置能适应2-3关节数的机器人腿部位移传感器和力传感器标定,且关节定位模块能适应机器人不同的关节形状,滑块刻度与标尺刻度采用游标卡尺测量原理,使装置的定位精度达0.02mm,保证了传感器的精确标定。
- 还没有人留言评论。精彩留言会获得点赞!