基于互相关算法的激光雷达系统的测距方法及测距系统
本发明涉及激光雷达系统,尤其涉及一种基于互相关算法的激光雷达系统的测距方法及测距系统。
背景技术:
1、激光雷达系统是一种以发射激光束来探测待测对象的位置、速度等特征量的雷达系统,相比于传统的雷达系统,激光雷达系统具有探测距离更远、分辨率更高、体积更小、抗干扰能力更强等特点。现有的测距方法包括脉冲测距法、调幅连续波测距法、调频连续波测距法、相位调制连续波测距法等。脉冲测距法、调幅连续波测距法和调频连续波测距法在探测较远距离的待测对象时为提高信噪比就必须提高激光功率,带来了人眼安全问题,而相位调制连续波测距法对发射功率的要求低。相位调制连续波测距法虽然具有测距精度高、发射功率依赖低、抗干扰能力强等优点,但在测量远距离的待测对象时存在信号信噪比(signal noise ratio, snr)低的问题。当待测对象与激光雷达系统的距离较近时,相位调制连续波激光雷达系统输出的时域谱的信号snr高,如图1所示,导致中频信号的脉冲宽度,即飞行时间很容易从时域谱中被读出,进而利用现有的相位调制连续波测距法从时域谱中获取中频信号的脉冲宽度,结合光速即可获得待测对象的距离信息,但是当待测对象与激光雷达系统的距离较远时,相位调制连续波激光雷达系统输出的时域谱的信号snr低,会使得有效信号几乎被噪声淹没,很难从时域谱信息上测量出中频信号的脉冲宽度,如图2所示,进而无法按现有的相位调制连续波测距法,并结合光速公式获取待测对象的距离信息,即限制了现有的相位调制连续波测距法的最远测量距离,且限制了激光雷达系统在自动驾驶等领域的更进一步的应用。
技术实现思路
1、本发明为解决现有的相位调制连续波测距法的最远测量距离受限的问题,提供一种基于互相关算法的激光雷达系统的测距方法及测距系统,采用将时域信号转换频域信号的方法以提升信噪比,在保证相位调制连续波测距法的现有优点的前提下提高了激光雷达系统的最远测距距离。
2、本发明提出的基于互相关算法的激光雷达系统的测距方法,具体包括如下步骤:
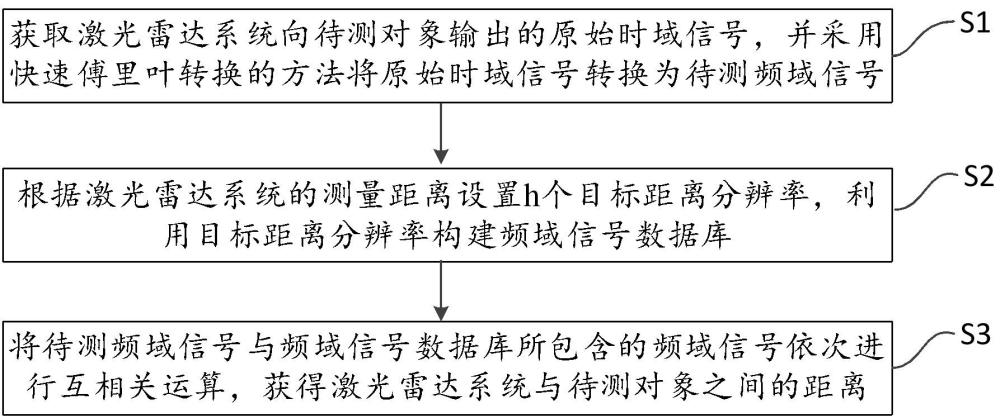
3、s1:获取激光雷达系统向待测对象输出的原始时域信号,并采用快速傅里叶转换的方法将原始时域信号转换为待测频域信号;
4、s2:根据激光雷达系统的测量距离设置h个目标距离分辨率,利用目标距离分辨率构建频域信号数据库;
5、s3:将待测频域信号与频域信号数据库所包含的频域信号依次进行互相关运算,获得激光雷达系统与待测对象之间的距离;
6、步骤s3具体包括如下步骤:
7、s31:通过下式将待测频域信号依次与频域信号数据库所包含的频域信号进行互相关运算:
8、;
9、其中,为互相关系数,x(n)和y(n)分别为待测频域信号和频域信号数据库中待计算的频域信号的样本值,n为待测频域信号的长度,m为延迟的样本数;
10、s32:将互相关系数的最大值所对应的频域信号数据库中的频域信号作为目标频域信号,并将目标频域信号所对应的实际距离作为激光雷达系统与待测对象之间的距离。
11、优选地,步骤s2具体包括如下步骤:
12、s21:根据激光雷达系统的测量距离设置h个目标距离分辨率hi,i∈[1,h];
13、s22:根据目标距离分辨率hi对应设置采集点,将测距对象依次置于采集点上,并对应获得激光雷达系统向测距对象输出的原始时域信号;
14、s23:采用快速傅里叶转换的方法将步骤s22所采集的所有原始时域信号依次转换为频域信号;
15、s24:将h个目标距离分辨率和在h个目标距离分辨率下所设置的所有采集点与激光雷达系统所对应的实际距离,以及与所有实际距离一一对应的频域信号作为频域信号数据库。
16、本发明提出的基于互相关算法的激光雷达系统的测距系统,用于实现基于互相关算法的激光雷达系统的测距方法,基于互相关算法的激光雷达系统的测距系统包括:
17、发射模块,用于向待测对象发送原始时域信号;
18、信号处理模块,用于采用快速傅里叶转换方法将原始时域信号转换为频域信号;
19、频域信号数据库构建模块,用于根据激光雷达系统的测量距离设置h个目标距离分辨率,并利用目标距离分辨率构建频域信号数据库;
20、距离解算模块,用于将待测频域信号与频域信号数据库所包含的频域信号依次进行互相关运算,获得激光雷达系统与待测对象之间的距离。
21、优选地,频域信号数据库构建模块包括:
22、目标距离分辨率划分子模块,用于根据激光雷达系统的测量距离设置h个目标距离分辨率hi,i∈[1,h];
23、原始时域信号获取模块,用于根据目标距离分辨率hi对应设置采集点,将测距对象依次置于采集点上,并对应获得激光雷达系统向测距对象输出的原始时域信号;
24、信号转换子模块,用于采用快速傅里叶转换的方法将原始时域信号获取模块获得的所有原始时域信号依次转换为频域信号;
25、频域信号数据库获取子模块,用于将h个目标距离分辨率和在h个目标距离分辨率下所设置的所有采集点与激光雷达系统所对应的实际距离,以及与所有实际距离一一对应的频域信号作为频域信号数据库。
26、优选地,距离解算模块包括:
27、互相关运算子模块,用于通过下式将待测频域信号依次与频域信号数据库所包含的频域信号进行互相关运算:
28、;
29、其中,为互相关系数,x(n)和y(n)分别为待测频域信号和频域信号数据库中待计算的频域信号的样本值,n为待测频域信号的长度,m为延迟的样本数;
30、距离计算子模块,用于将互相关系数的最大值所对应的频域信号数据库中的频域信号作为目标频域信号,并将目标频域信号所对应的实际距离作为激光雷达系统与待测对象之间的距离。
31、与现有技术相比,本发明能够取得如下有益效果:
32、本发明首先将激光雷达系统输出的原始时域信号转换为待测频域信号以提升信噪比,继而利用互相关算法计算待测频域信号与频域信号数据库所包含的频域信号的互相关系数,从而获取激光雷达系统与待测对象之间的距离,本发明无需对现有的相位调制连续波激光雷达系统进行硬件方面的改动,只需要在算法方面进行设计并对激光雷达系统输出的原始时域信号进行处理即可实现激光雷达系统的远距离测距,成本较低,且易于实现。
技术特征:
1.一种基于互相关算法的激光雷达系统的测距方法,其特征在于,具体包括如下步骤:
2.根据权利要求1所述的基于互相关算法的激光雷达系统的测距方法,其特征在于,所述步骤s2具体包括如下步骤:
3.一种基于互相关算法的激光雷达系统的测距系统,用于实现权利要求1-2任一项所述的基于互相关算法的激光雷达系统的测距方法,其特征在于,所述基于互相关算法的激光雷达系统的测距系统包括:
4.根据权利要求3所述的基于互相关算法的激光雷达系统的测距系统,其特征在于,所述频域信号数据库构建模块包括:
5.根据权利要求4所述的基于互相关算法的激光雷达系统的测距系统,其特征在于,所述距离解算模块包括:
技术总结
本发明涉及激光雷达系统技术领域,尤其涉及一种基于互相关算法的激光雷达系统的测距方法及测距系统。方法包括:S1:获取激光雷达系统向待测对象输出的原始时域信号,并采用快速傅里叶转换的方法将原始时域信号转换为待测频域信号;S2:根据激光雷达系统的测量距离设置h个目标距离分辨率,利用目标距离分辨率构建频域信号数据库;S3:将待测频域信号与频域信号数据库所包含的频域信号依次进行互相关运算,获得激光雷达系统与待测对象之间的距离。本发明采用将时域信号转换频域信号的方法以提升信噪比,在保证相位调制连续波测距法的现有优点的前提下提高了激光雷达系统的最远测距距离。
技术研发人员:王玉冰,刘康宁,梁磊,张明时,秦莉,王立军
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!