主动变形四旋翼飞行器自抗扰飞行控制方法与流程
[0001]
本发明涉及航空飞行器与机器人及其控制技术,特别是涉及主动变形四旋翼飞行器自抗扰飞行控制方法。
背景技术:
[0002]
多旋翼飞行器机动性强并且具有悬停能力,除了可以执行航拍、环境监测等正常任务,还可用于地下管道、自然洞穴以及工业容器探测中。常规多旋翼飞行器具有的共同特点是几何外形较为固定,一旦设计定型,在飞行过程中就无法改变自身形态。因此在设计之初就存在一个问题,即缺乏自然界飞行生物中很常见的适应不同飞行状态与任务的变形能力,例如,鸽子可以通过改变翅膀形态来越过不同尺寸间隙:它们向上弯折翅膀来越过相对较大的垂直缺口,向身体内侧收紧翅膀来穿过比较狭窄的缝隙。这种变形能力在执行营救任务或在复杂结构中进行检查等场景下非常有用,避免了在设计过程中通过减少飞行续航时间以及运载能力从而使多旋翼飞行器微型化来穿过狭窄缝隙。该能力的缺失导致常规多旋翼飞行器的环境适应性和通过性较差,很难通过一些受限空间。
[0003]
主动变形四旋翼是一种在飞行过程中能够主动改变自身形态的飞行器。主动变形四旋翼飞行器的基本思想是在飞行作业过程中通过主动改变机臂长度、角度等,使飞行器形状结构发生改变,进而得到更好的环境适应性。
[0004]
现有技术中,通过在机体中心固连反向共轴双旋翼组件,可通过调整各旋翼动力输出以及旋翼工作倾角,使得飞行器可以保持机体水平的同时实现前飞。但该异性倾转多旋翼飞行器无法真正实现自身形状结构的改变,环境适应性有限,并且其没有给出控制方法。
技术实现要素:
[0005]
发明目的:本发明的目的是提供一种主动变形四旋翼飞行器自抗扰飞行控制方法,以实现动态变形时位置和姿态的良好控制,提高抵抗外部扰动的能力。
[0006]
技术方案:本发明的主动变形四旋翼飞行器自抗扰飞行控制方法,包括以下步骤:
[0007]
s1、根据主动变形四旋翼飞行器的两种变形方式,对主动变形四旋翼飞行器进行结构设计;
[0008]
s2、根据步骤s1中所设计的主动变形四旋翼飞行器结构,推导动态变形时机体重心位置、惯量矩阵参数的变化;
[0009]
s3、根据步骤s1、s2推导出主动变形四旋翼飞行器的动力学模型和控制分配形式;
[0010]
s4、根据步骤s3中所建立的主动变形四旋翼飞行器的动力学模型,设计位姿自抗扰飞行控制器。
[0011]
进一步的,步骤s1中两种变形方式为:
[0012]
(a)机臂伸缩,即通过伸缩舵机使机臂进行伸缩变形,以改变机臂长度;
[0013]
(b)机臂折叠,通过旋转舵机使机臂绕机体系z
b
轴进行折叠变形,即改变δ
i
,其中,
δ
i
表示第i个机臂绕机体系z
b
轴旋转的角度,i=1...4;其四个机臂可以单独或组合进行变形。
[0014]
进一步的,步骤s2具体为:
[0015]
主动变形四旋翼飞行器机体重心与机体系坐标原点的偏移量r
cog
∈r3表示如下:
[0016]
;
[0017]
其中,m
body
表示机体的质量,m
arm
表示机臂的质量,m
mot
表示旋翼的质量,m
rot
表示电机的质量,m
elo
表示伸缩舵机的质量,r
body
表示机体系坐标原点到机体的矢径,r
arm,i
表示机体系坐标原点到ith机臂的矢径,r
mot,i
表示机体系坐标原点到ith旋翼的矢径,r
rot,i
表示机体系坐标原点到ith电机的矢径,r
elo,i
表示机体系坐标原点到ith伸缩舵机的矢径,ith表示第i个,i=1...4。
[0018]
对于主动变形四旋翼飞行器机体惯量矩阵i
b
,各部分惯量矩阵计算式如下:
[0019]
;
[0020]
其中,i
body
表示机体的惯量矩阵,i
mot
表示旋翼的惯量矩阵,i
rot
表示电机的惯量矩阵,表示第i个机臂的惯量矩阵,表示第i个机臂上的伸缩舵机的惯量矩阵,l
body
、h
body
分别为包含旋转舵机在内的机体的长宽和高;l
arm,i
、w
arm
、h
arm
分别为机臂的长、宽、高;r
mot
、h
mot
分别为旋翼的半径和高;r
rot
、h
rot
分别为电机的半径和高;l
elo
、w
elo
、h
elo
分别为伸缩舵机的长、宽、高。电机、旋翼、机臂和伸缩舵机在主动变形四旋翼飞行器进行折叠变形时,它们的惯量矩阵也必须进行重新计算,引入旋转矩阵对它们进行重新表示:
[0021]
;
[0022]
其中,i
arm,i
表示ith机臂的惯量矩阵,i
elo,i
表示ith伸缩舵机的惯量矩阵,r
z
(δ
i
)表示旋转矩阵,r
z
(δ
i
)
t
表示旋转矩阵的转置;
[0023]
其中,旋转矩阵表达如下:
[0024]
;
[0025]
其中,表示cosδ
i
,表示sinδ
i
;
[0026]
惯量矩阵i
b
计算式表示为:
[0027][0028]
进一步的,步骤s3具体为:
[0029]
根据牛顿-欧拉方程,得到主动变形四旋翼飞行器的平移动力学模型为:
[0030]
;
[0031]
上式中m表示机体总质量,即m=m
body
+4m
arm
+4m
mot
+4m
rot
+4m
elo
,f
e
表示主动变形四旋翼飞行器系统受力总和,通过下式计算:
[0032]
;
[0033]
;
[0034]
;
[0035]
;
[0036]
其中,n
i
是第i旋翼的转速,k
f
>0是旋翼的升力系数,g
e
表示重力,f
te
表示旋翼产生的升力,表示风扰力,d
e
表示空气阻力,
e
r
b
表示从机体系旋转到地球固连坐标系的旋转矩阵,t
i
表示机体系下第i个旋翼产生的升力,c表示空气阻力系数,s
air
表示迎风面积,v
air
表示飞行器与空气的相对速度,即表示风速,v
e
表示飞行器速度。
[0037]
主动变形四旋翼飞行器的转动动力学模型为:
[0038]
;
[0039]
其中,i
b
是主动变形四旋翼飞行器的惯量矩阵,ω
b
表示机体系下三轴欧拉角速度,表示机体系下三轴欧拉角加速度,m
b
表示系统所受力矩,通过下式计算:
[0040]
;
[0041]
;
[0042]
;
[0043]
;
[0044]
;
[0045]
;
[0046]
其中,为旋翼升力所产生力矩,为旋翼旋转反扭矩,为系统陀螺效应项,为风扰力矩,为重力矩,l
i
代表第i个旋翼的升力作用点在机体系下的坐标矢量,j
p
为陀螺力矩系数,
b
r
e
为地球固连坐标系旋转到机体系的旋转矩阵,k
m
为反扭矩系数,为第i个旋翼产生的风扰力;
[0047]
综合上述平移动力学模型和转动动力学模型,可得主动变形四旋翼飞行器的动力学模型:
[0048]
;
[0049]
其中,表示地球固连坐标系下三轴加速度,和分别代表旋翼产生的力和力矩。主动变形四旋翼飞行器系统输入力,输入力矩,旋翼转速描述为:
[0050]
或;
[0051]
其中,表示旋翼产生的驱动力,表示旋翼产生的驱动力矩,n
i2
(i=1...4)表示第i个旋翼的转速平方;c为控制效率矩阵,c-1
为控制分配矩阵,δ
i
(i=1...4)表示第i个机臂绕机体系z
b
轴旋转的角度,和分别为sin(α
i
)和cos(α
i
),l
i
(i=1...4)表示第i个机臂长度,k
f
表示升力系数,k
m
表示旋翼电机的反扭矩系数;
[0052]
其中,即是控制效率矩阵;
[0053]
;
[0054]
其中,s
(
·
)
表示sin(
·
),c
(
·
)
表示cos(
·
)。
[0055]
进一步的,步骤s4具体为:
[0056]
将主动变形四旋翼飞行器系统动力学模型中的6个状态即三轴位置和三轴角度,视作6个通道,通过自抗扰控制adrc将系统各通道之间耦合与变形引起的参数摄动当作内部扰动处理,采用扩张状态观测器eso估计并补偿系统内外扰动实现各通道状态解耦,并且引入虚拟控制量实现系统控制解耦,从而将系统描述形式从mimo转换为六个siso系统的组合;表示如下:
[0057]
;
[0058]
其中:s
i
(
·
)为不确定项,和分别是系统所受外部扰动和变形产生的扰动。表示x方向上位置、速度、加速度;表示y方向上位置、速度、加速度;表示z方向上位置、速度、加速度;表示滚转角、滚转角速度、滚转角加速度;表示俯仰角、俯仰角速度、俯仰角加速度;表示偏航角、偏航角速度、偏航角加速度;
(p,q,r)表示机体三轴角速度。(b1,b2,b3)是大小在附近的可调参数,(b4,b5,b6)是大小分别在附近的可调参数,i
xx
、i
yy
、i
zz
分别是主动变形四旋翼飞行器x、y、z轴转动惯量值,(u1,u2,u3,u4,u5,u6)是引入的虚拟控制量;
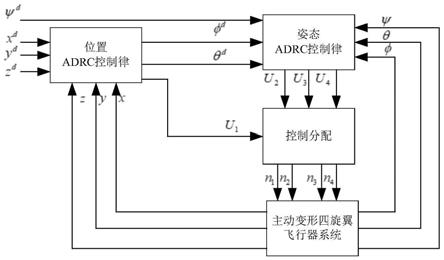
[0059]
控制律采用内外环策略,内环为姿态控制,外环为位置控制,引入控制量(u1,u2,u3,u4)分别代表总升力期望值和绕机体系三轴的转动力矩期望值。位置实际值(x,y,z)和位置期望值(x
d
,y
d
,z
d
)作为外环位置adrc控制律的输入,输出滚转角和俯仰角期望值(φ
d
,θ
d
)以及u1姿态实际值(φ,θ,ψ)和姿态期望值(φ
d
,θ
d
,ψ
d
)作为内环姿态adrc控制律输入,输出为(u2,u3,u4);最后(u1,u2,u3,u4)经过控制分配得到电机期望转速其中,虚拟控制量(u1,u2,u3,u4,u5,u6)与(u1,φ
d
,θ
d
)和(u2,u3,u4)之间的转换关系式分别为:
[0060]
;
[0061]
;
[0062]
;
[0063]
式中,s
φ
表示sinφ,c
φ
表示cosφ,c
θ
表示cosθ,t
θ
表示tanθ,s
ψ
表示sinψ,c
ψ
表示cosψ,表示cosφ
d
;
[0064]
俯仰角θ的姿态adrc控制律设计过程为:
[0065]
1)设计跟踪微分器td,以给定信号期望俯仰角θ
d
作为参考输入安排过渡过程:
[0066]
;
[0067]
其中,e是实际俯仰角与期望俯仰角的差值,v1是跟踪微分器td从初值到θ
d
的过渡量,v2是v1导数值,参数(r,h)分别为快速因子和滤波因子;
[0068]
2)设计扩张状态观测器eso,以系统输出俯仰角θ和控制输入u5用于实时观测系统状态和所受扰动:
[0069]
;
[0070]
其中,(z1,z2)跟踪z3估计总扰动s5,(β
01
,β
02
,β
03
)是一组可调参数;
[0071]
3)设计非线性误差反馈律nlsef,计算u0并和扰动补偿组合计算出控制量u5:
[0072]
;
[0073]
其中,参数(r,h,c)为可调参数,最速跟踪控制综合函数fhan(x1,x2,r,h)和非线性函数fal(e,α,δ)表达式如下:
[0074]
;
[0075]
;
[0076]
其中,δ>0,φ和ψ通道控制律设计与θ通道相同;
[0077]
位置adrc控制律设计过程中,位置三通道的td、eso和nlsef的设计都与θ通道所设计的相同,唯一不同点在于z通道nlsef采用的是如下形式:
[0078]
;
[0079]
其中,(k1,k2)为可调参数。
[0080]
有益效果:与现有技术相比,本发明具有以下好的技术效果:
[0081]
(1)本方法针对常规多旋翼飞行器不具备变形能力的问题,针对机臂可伸长和折
叠的主动变形四旋翼飞行器进行控制器设计,提高了飞行器的环境适应性,拓展了多旋翼飞行器的任务领域。
[0082]
(2)本方法针对主动变形四旋翼飞行器具有系统不确定性、易受内外部扰动影响等特点,对主动变形四旋翼飞行器进行位姿自抗扰控制器设计,提高了空中机器人姿态控制器的鲁棒性和可靠性。
[0083]
(3)本方法不仅能克服主动变形四旋翼飞行器本身的参数摄动对控制器带来的影响,还能对飞行过程中机体受到的未知外部扰动起到良好的抑制作用。
[0084]
(4)本方法提出的针对动态变形时机体参数进行重新计算的算法正确有效,能准确计算出变形过程中机体重心位置、惯量矩阵等参数数值,进而保证了所建立数学模型的准确性。
附图说明
[0085]
图1为本发明针对的主动变形四旋翼飞行器示意图;
[0086]
图2为本发明方法的位姿自抗扰控制实现原理图;
[0087]
图3为本发明方法所应用的adrc控制器结构图;
[0088]
图4为实施例情况1下本发明方法在单个机臂伸长仿真曲线图;
[0089]
图5为实施例情况1下本发明方法在单个机臂折叠仿真曲线图;
[0090]
图6为实施例情况1下本发明方法在双机臂伸长仿真曲线图;
[0091]
图7为实施例情况1下本发明方法在双机臂折叠仿真曲线图;
[0092]
图8为实施例情况1下本发明方法在四机臂折叠仿真曲线图;
[0093]
图9为实施例情况2下本发明方法轨迹跟踪变形曲线图;
[0094]
图10为实施例情况3下测试本发明方法所用的风扰效果图;
[0095]
图11为实施例情况3下本发明的飞行器受风扰后高度响应曲线与pid的对比。
具体实施方式
[0096]
下面结合附图和具体实施例对本发明进行详细说明。所述实施方式的示例在附图中示出,其中每个机臂均可在舵机的驱动下进行伸缩和折叠。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
[0097]
本发明的主动变形四旋翼飞行器自抗扰飞行控制方法,主要包括如下步骤:
[0098]
s1、根据主动变形四旋翼飞行器的两种变形方式,对主动变形四旋翼飞行器进行结构设计;
[0099]
两种变形方式为:1)机臂伸缩,即通过伸缩舵机使机臂进行伸缩变形,以改变机臂长度;2)机臂折叠,通过旋转舵机使机臂绕机体系z
b
轴进行折叠变形,即改变δ
i
,δ
i
(i=1...4)表示第i个机臂绕机体系z
b
轴旋转的角度;其四个机臂可以单独或组合进行变形。主动变形四旋翼飞行器的示意图如图1所示,定义地球固连坐标系o
e
x
e
y
e
z
e
固连于地面,机体坐标系o
b
x
b
y
b
z
b
原点固定于飞行器机身重心处,同时定义主动变形四旋翼飞行器的伸缩舵机安装在各机臂中点处,旋转舵机安装在机身上。
[0100]
s2、根据步骤s1中所设计的主动变形四旋翼飞行器结构,推导动态变形时机体重心位置、惯量矩阵等参数的变化;
[0101]
主动变形四旋翼飞行器机体重心与机体系坐标原点的偏移量r
cog
∈r3表示如下:
[0102][0103]
其中,m
(
·
)
表示(
·
)的质量,r
(
·
)
表示机体系坐标原点到(
·
)的矢径,各下标英文字母代表含义见表1,ith代表第i个,i=1...4。
[0104]
表1下标英文字母含义
[0105][0106][0107]
即,m
body
表示机体的质量,m
arm
表示机臂的质量,m
mot
表示旋翼的质量,m
rot
表示电机的质量,m
elo
表示伸缩舵机的质量,r
body
表示机体系坐标原点到机体的矢径,r
arm,i
表示机体系坐标原点到ith机臂的矢径,r
mot,i
表示机体系坐标原点到ith旋翼的矢径,r
rot,i
表示机体系坐标原点到ith电机的矢径,r
elo,i
表示机体系坐标原点到ith伸缩舵机的矢径,ith代表第i个,i=1...4。
[0108]
对于主动变形四旋翼飞行器机体惯量矩阵i
b
,各部分惯量矩阵计算式如下:
[0109][0110]
其中,i
body
表示机体的惯量矩阵,i
mot
表示旋翼的惯量矩阵,i
rot
表示电机的惯量矩阵,表示第i个机臂的惯量矩阵,表示第i个机臂上的伸缩舵机的惯量矩阵,l
body
、h
body
分别为包含旋转舵机在内的机体的长宽和高;l
arm,i
、w
arm
、h
arm
分别为机臂的长、宽、高;r
mot
、h
mot
分别为旋翼的半径和高;r
rot
、h
rot
分别为电机的半径和高;l
elo
、w
elo
、h
elo
分别为伸缩舵机的长、宽、高。电机、旋翼、机臂和伸缩舵机在主动变形四旋翼飞行器进行折叠变形时,它们的惯量也必须进行重新计算,引入旋转矩阵对它们进行重新表示:
[0111][0112]
其中,i
arm,i
表示ith机臂的惯量矩阵,i
elo,i
表示ith伸缩舵机的惯量矩阵,r
z
(δ
i
)表示旋转矩阵,r
z
(δ
i
)
t
表示旋转矩阵的转置。
[0113]
其中,旋转矩阵表达如下:
[0114][0115]
其中,表示cosδ
i
,表示sinδ
i
。
[0116]
惯量矩阵i
b
计算式可以表示为:
[0117][0118]
s3、根据步骤s1、s2推导出主动变形四旋翼飞行器的动力学模型和控制分配形式(执行器控制分配矩阵);
[0119]
根据牛顿-欧拉方程,可以得到主动变形四旋翼飞行器系统的平移动力学模型为:
[0120][0121]
上式中m表示机体总质量,即m=m
body
+4m
arm
+4m
mot
+4m
rot
+4m
elo
,f
e
表示主动变形四旋翼飞行器系统受力总和,可通过下式计算:
[0122][0123][0124][0125][0126]
其中,n
i
是第i旋翼的转速,k
f
>0是旋翼的升力系数,g
e
表示重力,表示旋翼产生的升力,表示风扰力,d
e
表示空气阻力,
e
r
b
表示从机体系旋转到地球固连坐标系的旋转矩
阵,t
i
表示机体系下第i个旋翼产生的升力,c表示空气阻力系数,s
air
表示迎风面积,v
air
表示飞行器与空气的相对速度,即表示风速,v
e
表示飞行器速度。
[0127]
主动变形四旋翼飞行器的转动动力学模型为:
[0128][0129]
其中,i
b
是主动变形四旋翼的惯量矩阵,ω
b
表示机体系下三轴欧拉角速度,表示机体系下三轴欧拉角加速度,m
b
表示系统所受力矩,可通过下式计算:
[0130][0131][0132][0133][0134][0135][0136]
其中,为旋翼升力所产生力矩,为旋翼旋转反扭矩,为系统陀螺效应项,为风扰力矩,为重力矩,l
i
代表第i个旋翼的升力作用点在机体系下的坐标矢量,j
p
为陀螺力矩系数,
b
r
e
为地球固连坐标系旋转到机体系的旋转矩阵,k
m
为反扭矩系数,为第i个旋翼产生的风扰力。
[0137]
综合上述平移动力学模型和转动动力学模型,可得主动变形四旋翼飞行器的动力学模型:
[0138][0139]
其中,表示地球固连坐标系下三轴加速度,和分别代表旋翼产生的力和力矩。
[0140]
主动变形四旋翼飞行器系统输入力(即旋翼产生的力),输入力矩(即旋翼产生的力矩),旋翼转速可描述为:
[0141]
或
[0142]
其中,表示旋翼产生的驱动力,表示旋翼产生的驱动力矩,n
i2
(i=1...4)表示第i个旋翼的转速平方;c为控制效率矩阵,c-1
为控制分配矩阵,δ
i
(i=1...4)表示第i个机臂绕机体系z
b
轴旋转的角度,和分别为sin(α
i
)和cos(α
i
),l
i
(i=1...4)表示第i个机臂长度,k
f
表示升力系数,k
m
表示旋翼电机的反扭矩系数。
[0143]
其中,即是控制效率矩阵;
[0144][0145]
其中,s
(
·
)
表示sin(
·
),c
(
·
)
表示cos(
·
)。
[0146]
s4、根据步骤s3中所建立的主动变形四旋翼飞行器的动力学模型,设计位姿自抗扰飞行控制器。
[0147]
将主动变形四旋翼飞行器系统动力学模型中的6个状态即三轴位置和三轴角度,视作6个通道,通过adrc(自抗扰控制)将系统各通道之间耦合与变形引起的参数摄动当作内部扰动处理,采用eso(扩张状态观测器)估计并补偿系统内外扰动实现各通道状态解耦,并且引入虚拟控制量实现系统控制解耦,从而将系统描述形式从mimo转换为六个siso系统的组合;表示如下:
[0148][0149]
其中:s
i
(
·
)为不确定项,和分别是系统所受外部扰动和变形产生的扰动。表示x方向上位置、速度、加速度;表示y方向上位置、速度、加速度;表示z方向上位置、速度、加速度;表示滚转角、滚转角速度、滚转角加速度;表示俯仰角、俯仰角速度、俯仰角加速度;表示偏航角、偏航角速度、偏航角加速度;(p,q,r)表示机体三轴角速度。(b1,b2,b3)是大小在附近的可调参数,(b4,b5,b6)是大小分别在附近的可调参数,i
xx
、i
yy
、i
zz
分别是主动变形四旋翼飞行器x、y、z轴转动惯量值,(u1,u2,u3,u4,u5,u6)是引入的虚拟控制量。
[0150]
控制律采用内外环策略,内环为姿态控制,外环为位置控制,如图2所示。引入控制量(u1,u2,u3,u4)分别代表总升力期望值和绕机体系三轴的转动力矩期望值。位置实际值(x,y,z)和位置期望值(x
d
,y
d
,z
d
)作为外环位置adrc控制律的输入,输出滚转角和俯仰角期望值(φ
d
,θ
d
)以及u1姿态实际值(φ,θ,ψ)和姿态期望值(φ
d
,θ
d
,ψ
d
)作为内环姿态adrc控制律输入,输出为(u2,u3,u4)。最后(u1,u2,u3,u4)经过控制分配得到电机期望转速其中,虚拟控制量(u1,u2,u3,u4,u5,u6)与(u1,φ
d
,θ
d
)和(u2,u3,u4)之间的转换关系式分别为:
[0151][0152]
[0153][0154]
式中,s
φ
表示sinφ,c
φ
表示cosφ,c
θ
表示cosθ,t
θ
表示tanθ,s
ψ
表示sinψ,c
ψ
表示cosψ,表示cosφ
d
。
[0155]
adrc控制器结构图如图3所示,俯仰角θ的姿态adrc控制律设计过程为:
[0156]
1)设计跟踪微分器(td),以给定信号期望俯仰角θ
d
作为参考输入安排过渡过程:
[0157][0158]
其中,e是实际俯仰角与期望俯仰角的差值,v1是跟踪微分器td从初值到θ
d
的过渡量,v2是v1导数值,参数(r,h)分别为快速因子和滤波因子。
[0159]
2)设计扩张状态观测器(eso),以系统输出俯仰角θ和控制输入u5用于实时观测系统状态和所受扰动:
[0160][0161]
其中,(z1,z2)跟踪z3估计总扰动s5,(β
01
,β
02
,β
03
)是一组可调参数。
[0162]
3)设计非线性误差反馈律(nlsef),计算u0并和扰动补偿组合计算出控制量u5:
[0163][0164]
其中,参数(r,h,c)为可调参数。最速跟踪控制综合函数fhan(x1,x2,r,h)和非线性函数fal(e,α,δ)表达式如下:
[0165]
[0166][0167]
其中,δ>0。φ和ψ通道控制律设计与θ通道类似,这里不详细说明。
[0168]
位置adrc控制律设计过程中,位置三通道的td、eso和nlsef的设计都和上节θ通道所设计的类似,唯一不同点在于z通道nlsef采用的是如下形式:
[0169][0170]
其中,(k1,k2)为可调参数。
[0171]
下面介绍本发明的实施例。
[0172]
以所设计的主动变形四旋翼飞行器(如图1所示)为对象,在matlab/simulink环境下对其进行仿真验证,以验证本发明的全向控制方法的有效性。主动变形四旋翼飞行器的数学模型的具体参数如表2:
[0173]
表2系统仿真参数
[0174]
[0175][0176]
情况1:主动变形四旋翼飞行器定点悬停变形
[0177]
仿真实验中设定主动变形四旋翼飞行器初始位置期望位置在仿真第10s进行变形,仿真结果如图4、图5、图6、图7、图8。图4-图5分别为单个机臂伸长和折叠的仿真曲线,图6-图7分别为双机臂伸长和折叠的仿真曲线,图8为四机臂折叠的仿真曲线。
[0178]
仿真结果表明,本发明在定点悬停时进行变形对位置和姿态影响小。
[0179]
情况2:主动变形四旋翼飞行器轨迹跟踪变形
[0180]
仿真实验中设计主动变形四旋翼飞行器轨迹跟踪路线,在轨迹跟踪的第10秒进行变形,变形方式选择机臂1进行伸长和折叠。图9所示为主动变形四旋翼飞行器轨迹跟踪曲线。
[0181]
仿真结果表明,本发明可以在轨迹跟踪期间进行变形,仍可以保持良好的位置跟踪效果。
[0182]
情况3:主动变形四旋翼飞行器在扰动条件下定高变形
[0183]
为了验证本发明在扰动作用下的性能,在仿真中加入风扰,紊流成型滤波器传递函数如下:
[0184][0185]
其中,(k
u
,k
v
,k
w
)、(l
u
,l
v
,l
w
)和(σ
u
,σ
v
,σ
w
)分别表示紊流增益、紊流强度和紊流尺度,v表示紊流风速。四旋翼飞行器主要以低空飞行为主,该飞行条件下紊流强度和紊流尺度计算式如下:
[0186][0187]
其中,u
20
表示6.096m高度的风速。风场条件为:有紊流风,有持续风风场效果如图10所示。设定初始高度为z0=0,期望高度为z
d
=5。图11所示为本发明的飞行器高度响应曲线与pid的对比。
[0188]
仿真结果表明,pid控制器对外部扰动比较敏感,飞行器高度无法收敛到目标值,在目标值附近波动,而本发明可以很好的抑制外部扰动,能够快速鲁棒地追踪期望高度。
[0189]
实验表明,本发明控制器对所设计的主动变形四旋翼飞行器有着良好的位姿控制效果,在飞行过程中可以良好地进行变形;本发明可显著提高主动变形四旋翼飞行器位姿控制的稳定性,提高了飞行器在外部扰动作用下的鲁棒性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1