一种多飞行机器人的集联操作平台
1.本发明涉及一种多飞行机器人的集联操作平台,属于控制技术、制导技术、传感技术以及无线通信技术领域。
背景技术:
2.目前,根据城市突遇爆炸后的救援需要,要求飞行器能远距离携带灭火弹发射装置、救援绳抛射装置等进行远距离消防救援,以及进行爆炸物的拆除和撤离作业,并且有良好的容错性和灵活性。多飞行无人机集群系统是实现上述功能的良好方式,即若干个飞行器组成飞行群体,具有良好的协同性,在城市消防救援领域有较为广阔的应用前景。
3.然而,传统的集群飞行器系统的各成员飞行器之间只需进行信息交互,没有机械结构上的连接,即该系统为多个单一个体的分布式控制,具有单独飞行器性能局限、具有较低适应性的弱点,不能很好的执行对集群飞行系统性能要求高的复杂任务。
技术实现要素:
4.为了使飞行机器人能够更好地适应救援场景的复杂环境,本发明提供一种多飞行机器人的集联操作平台,使多个飞行机器人由连接装置固连为一体,各成员飞行器之间具有力与力矩的相互作用,使得集联体可以灵活的进行结构变化,从而通过改变各子飞行器的姿态使集联体产生变形,进而调整灭火弹发射装置、救援绳抛射装置以及机械手的姿态达到执行任务的目的,该集联操作平台具有协同化高、灵活变形、容错率高等优点,能够使飞行机器人更好地执行复杂任务。
5.本发明的目的是通过以下技术方案实现的。
6.一种多飞行机器人的集联操作平台,所述集联操作平台包括中心控制模块、子飞行器模块和负载模块;
7.所述中心控制模块,用于计算各子飞行器模块所需执行的姿态信息(包括姿态角、拉力)向子飞行器模块发送驱动指令;
8.所述子飞行器模块,根据接收的中心控制模块发送的驱动指令调整姿态并将子飞行器模块调整后的姿态信息反馈给中心控制模块以判断驱动指令执行是否正常;
9.所述负载模块为执行任务所需要的救援工具;
10.子飞行器模块均匀分布于中心控制模块两侧,且各子飞行器模块通过杆状连接结构与中心控制模块固连,负载模块安装于中心控制模块上;
11.所述集联操作平台执行任务时,在中心控制模块的相关指令下,通过调控各子飞行器模块的姿态调整负载模块的姿态以达到执行任务的目的。
12.进一步地,所述中心控制模块还与地面站系统进行通信,便于地面站系统远程控制与监控所述集联操作平台的运行状态。
13.进一步地,所述中心控制模块包括中央处理器、飞控ⅰ和控制总线ⅰ,飞控ⅰ用于获取子飞行器模块的位置和姿态信息并传输给中央处理器,中央处理器通过运行飞行控制算
法计算各子飞行器模块所需执行的姿态角以及拉力矢量并通过控制总线ⅰ向各子飞行器模块发送驱动指令。
14.进一步地,所述子飞行器模块包括计算处理器、飞控ⅱ和控制总线ⅱ,计算处理器将接收的中心控制模块发送的驱动指令传递给飞控ⅱ,使子飞行器模块执行驱动指令的姿态角及拉力矢量,同时飞控ⅱ采集子飞行器模块执行驱动指令后的姿态信息并通过计算处理器、控制总线ⅱ将采集的信息反馈给中心控制模块,供中心控制模块判断驱动指令执行是否正常。
15.进一步地,所述负载模块根据执行任务的不同,可以选择负载不同的救援工具;
16.当实施远距离(1千米以内)柔顺精准救援时,负载模块可以选用灭火弹发射装置以及救援绳抛射装置等,通过变换负载模块的姿态角使得负载模块对目标实施瞄准,通过导纳控制等交互控制手段,使得集联体对发射过程中产生的力与力矩柔顺交互,使得发射过程集联体保持稳定;
17.当近距离(2米以内)全向处置时,负载模块为机械手,通过对多个飞行器模块进行协调来控制调整机械手的姿态,根据机械手操作的需要对一定的姿态轨迹进行跟踪,以适宜的位姿靠近目标,并在处置过程中同时调整机械手的位置与姿态,直到处置任务完成。
18.所述集联操作平台具有柔性突防功能,其工作原理如下:飞行器集联体需要穿越多障碍物的异构空间或者进入建筑物内部时,根据空间的大小,多个子飞行器模块协同围绕运动副转动,通过变形适应所需通过的复杂环境,达到作业地点后,多个子飞行器模块可根据需要再次围绕运动副转动变形为作业状态下构形以开展作业。
19.所述集联操作平台具有智能容错功能,其工作原理如下:子飞行器模块发生故障的状况时,中心控制模块可以协调其他子飞行器模块协同运动,对故障飞行器模块进行补偿,使整个集联操作平台仍保持一定运动能力,在执行任务过程中具有容错性。如果连接负载的子飞行器模块出现异常状态,可以通过中心控制模块向子飞行器模块发送相关指令,通过分解的方式使无故障子飞行器模块脱离,执行其余任务或撤离现场;如果无连接负载的子飞行器模块出现异常状态,可以通过中心控制模块向子飞行器模块发送相关指令,通过分解的方式使故障子飞行器模块脱离,集联操作平台继续执行原有任务。
20.有益效果:
21.(1)本发明所述多飞行机器人的集联操作平台不同于传统的集群飞行器系统,多飞行机器人集联体为各子飞行器由连接装置组成的整体,各成员飞行器之间具有力与力矩的相互作用,这样的设计使得集联体可以灵活的进行结构变化,通过改变各子飞行器的姿态使集联体产生变形,从而可以调整发射装置或机械手的姿态达到执行任务的目的;而且该集联操作平台采取集中式的控制模式,由中心控制模块进行决策并生成指令给各子飞行器,并实时接收子飞行器反馈的信息,集成化程度高,而且具有高度的协同化,从而使该集联操作平台具备远距离柔顺精准救援、近距离全向处置和柔性突防与智能容错等多种功能,能够满足城市爆炸消防救援的多种需要。
22.(2)本发明所述多飞行机器人的集联操作平台能够实现柔性突防与智能容错功能,保证了飞行机器人在需要穿越多障碍物的异构空间或者进入建筑物内部或子飞行器模块发生故障的状况中,有一定的安全保证;而且该集联操作平台具有协同化高、灵活变形、容错率高等优点,便于提升消防救援飞行机器人的使用寿命与作业效率,使飞行机器人能
够更好地适应救援场景的复杂环境。
附图说明
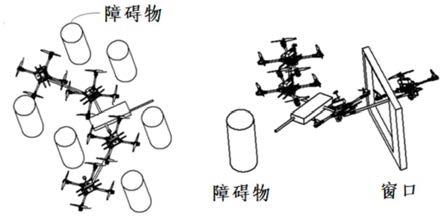
23.图1为实施例中所述集联操作平台穿越狭小空间的示意图。
24.图2为实施例中所述集联操作平台中连接负载的子飞行器模块出现故障时的分解示意图。
25.图3为实施例中所述集联操作平台中无连接负载的子飞行器模块出现故障时的分解示意图。
具体实施方式
26.下面结合具体实施方式对本发明作进一步阐述,其中,所述方法如无特别说明均为常规方法。
27.实施例1
28.一种多飞行机器人的集联操作平台,所述集联操作平台包括中心控制模块、子飞行器模块和负载模块;
29.所述中心控制模块包括中央处理器、飞控ⅰ和控制总线ⅰ,中央处理器可以根据所实现功能以及数据存储量的大小采用tx2等各种具有运算功能和数据存储功能的计算机处理嵌入式开发板;中央处理器可以通过usb与飞控ⅰ连接,飞控ⅰ用于获取子飞行器模块的位置和姿态信息并传输给中央处理器,中央处理器通过运行飞行控制算法计算各子飞行器模块所需执行的姿态角以及拉力矢量等姿态信心并通过控制总线ⅰ向各子飞行器模块发送驱动指令;
30.所述子飞行器模块的机械结构可以根据需要选用四旋翼机器人,所述子飞行器模块包括计算处理器、飞控ⅱ和控制总线ⅱ,计算处理器将接收的中心控制模块发送的驱动指令传递给飞控ⅱ,使子飞行器模块执行驱动指令的姿态角及拉力矢量,同时飞控ⅱ采集子飞行器模块执行驱动指令后的姿态信息并将采集的信息传输给计算处理器,计算处理器再通过控制总线ⅱ将子飞行器模块的姿态信息反馈给中心控制模块,供中心控制模块判断驱动指令执行是否正常;
31.所述负载模块为执行任务所需要的救援工具,根据执行任务的不同,可以选择负载不同的救援工具;当实施远距离(1千米以内)柔顺精准救援时,负载模块为灭火弹发射装置以及救援绳抛射装置等;当近距离(2米以内)全向处置时,负载模块为机械手;
32.子飞行器模块均匀分布于中心控制模块两侧,且各子飞行器模块通过杆状连接结构与中心控制模块固连,负载模块安装于中心控制模块上;中心控制模块还可以通过局域网与地面站系统进行通信,便于地面站系统远程控制与监控所述集联操作平台的运行状态;
33.所述集联操作平台具有远距离柔顺精准救援功能、近距离全向处置功能以及柔性突防与智能容错功能,其原理如下:
34.远距离柔顺精准救援功能的原理:由于所述集联操作平台具有全驱动与全向运动能力,将负载模块固连于集联体飞行平台上,在集联体保持悬停的状态下,通过中心控制模块发出指令给个子飞行器模块,可以调整多个子飞行器模块的姿态,对集联体进行变形,进
而变换负载模块的姿态角。如有n个子飞行器模块组成的集联体,可以使n个子飞行器模块的拉力指向不同的方向,通过调整n个拉力矢量的大小和方向,可以使集联体整体保持悬停,并调整负载模块的姿态,使得负载模块对目标实施瞄准,通过导纳控制等交互控制手段,使得集联体对发射过程中产生的力与力矩柔顺交互,从而在发射过程中保持稳定,在任务完成可以撤离现场,有利于二次使用。
35.近距离全向处置功能的原理:在作战区域中,如需对爆炸物进行拆除搬离,需要根据机械手的尺寸与重量,选取多个子飞行器模块构建集联操作平台对危险物品进行处置。在搬离物体的过程中,在集联体保持悬停的状态下,通过中心控制模块发出指令给各子飞行器模块,可以调整多个子飞行器模块的姿态,进而对集联体进行变形,从而可以对机械手的姿态进行调整。根据负载模块即机械手操作的需要对一定的姿态轨迹进行跟踪,使机械手以适宜的位姿靠近目标,并在集联操作平台靠近目标的过程中同时调整机械手的位置与姿态,直到处置任务完成。
36.柔性突防功能的原理:所述集联操作平台需要穿越多障碍物的异构空间或者进入建筑物内部时,根据空间的大小,中心控制模块通过控制算法计算得到使集联操作平台协同运动从而围绕运动副转动产生变形所需的拉力矢量,并将其发送给子飞行器模块进行相应的变形,从而使集联操作平台可以通过窗口或复杂环境,如图1所示。例如窗口水平尺寸不足,可以对子飞行器模块的姿态角进行调整,使各子飞行器模块以倾斜姿态顺次通过。
37.智能容错功能的原理:在所述集联操作平台执行任务的过程中,当中心控制模块检测到子飞行器模块反馈的姿态角和拉力矢量与驱动指令不一致时,说明该子飞行器模块发生故障,如果连接负载的子飞行器模块出现异常状态,可以通过中心控制模块向子飞行器模块发送相关指令,通过分解的方式使无故障子飞行器模块脱离,执行其余任务或撤离现场,如图2所示;如果无连接负载的子飞行器模块出现异常状态,可以通过中心控制模块向子飞行器模块发送相关指令,通过分解的方式使故障子飞行器模块脱离,集联操作平台继续执行原有任务,如图3所示。
38.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1