一种无拖曳航天器的地面模拟系统
1.本发明涉及航天器物理仿真技术领域,具体涉及一种无拖曳航天器的地面模拟系统。
背景技术:
2.传统航天器由于受到太阳光压、大气阻力、微陨石撞击等外部环境干扰以及传感器噪声、推力器噪声、结构振动等自身因素影响,难以达到超高精度、超高稳定性的要求。为了使航天器长期保持超高精度、超高稳定性状态,因此采用外部本体封装内部惯性基准构型的无拖曳航天器显得尤为必要。无拖曳航天器作为微重力空间实验平台,广泛应用于重力测量和引力波测量中,其主要思想是利用检验质量作为惯性基准,利用微推进器来补偿卫星受到的非保守力,使卫星跟踪检验质量,从而达到一个静跟踪源的目的。多参考质量无拖曳控制系统的地面仿真验证工作主要集中在在惯性传感器的性能。
3.卫星地面物理模拟仿真技术是研制卫星的过程中特有的仿真方法,它利用地面实验机构对卫星进行运动模拟与仿真。卫星控制系统物理仿真平台通常使用三轴气浮台模拟卫星本体作为被控对象,模拟失重或无阻力等环境,受到航天器研制领域的认可。
技术实现要素:
4.本发明提出一种多检验质量无拖曳控制地面模拟系统方案,用于在地面上模拟空间卫星及检验质量块的运动形态,为空间引力波测量系统动力学与控制过程的地面模拟提供有力支撑。
5.为解决上述问题,本发明采用如下技术方案:
6.一种无拖曳航天器的地面模拟系统,包括
7.模拟卫星,具有至少一个标定点;
8.至少一个质量块,所述至少一个质量块无接触地配置在所述模拟卫星内,且所述至少一个质量块配置为与所述模拟卫星联动;
9.用于测量所述模拟卫星和至少一个质量块的位姿信息的至少一个检验质量单元,所述至少一个检验质量单元设置在所述模拟卫星内;
10.用于营造仿微重力环境的模拟平台;
11.用于将所述至少一个质量块悬吊在所述模拟卫星内的至少一个模拟悬吊单元;
12.通过拍摄所述至少一个标定点生成定位信息的至少一个视觉相机;
13.计算机构,所述至少一个视觉相机、模拟平台、至少一个检验质量单元和模拟卫星均与所述计算机构连接;
14.其中,所述计算机构被配置为根据所述定位信息确定模拟卫星位置与姿态;
15.所述计算机构被配置为根据所述位姿信息绘制运行状态图。
16.作为优选,所述模拟平台为气浮平台或六自由度电动转台。
17.作为优选,所述模拟平台包含有
18.工作台;
19.支撑托架;
20.气足;以及
21.供气系统,所述气足与所述供气系统连接,所述气足设置在所述工作台上,所述气足支撑住所述模拟卫星。
22.作为优选,所述模拟悬吊单元包含有
23.龙门架;以及
24.用于悬吊所述至少一个质量块的至少一个悬丝,所述至少一个悬丝的一端与所述龙门架固定,所述至少一个质量块与所述至少一个悬丝的另一端固定;
25.所述至少一个视觉相机设置在所述龙门架上,所述至少一个视觉相机面向所述至少一个标定点。
26.作为优选,所述检验质量单元包含有
27.用于驱动所述至少一个质量块与所述模拟卫星联动的至少一个驱动机构;
28.传感器组,具有至少一个第一激光位移传感器和至少一个第二激光位移传感器,所述至少一个第二位移激光传感器设置在所述模拟卫星上;以及
29.固定在所述模拟卫星内的至少一个围挡体;
30.其中,所述至少一个围挡体内具有安放槽,所述至少一个质量块无接触地配置在所述安放槽内,所述至少一个第一激光位移传感器设置在所述至少一个围挡体上并面向所述至少一个质量块,所述至少一个驱动机构设置在所述至少一个围挡体上。
31.作为优选,所述模拟卫星包含有
32.框架体,具有至少一个穿过孔,所述悬丝穿过所述至少一个穿过孔,所述围挡体与所述框架体固定连接;
33.安装于所述框架体内的控制模块;
34.安装于所述框架体内的供电模块;
35.用于推动所述框架体活动的推进模块,所述传感器组、推进模块和驱动机构均与所述控制模块电性连接;以及
36.用于与所述的计算机构通讯的通信模块,所述通信模块与所述计算机构电性连接。
37.作为优选,所述计算机构包含有工控机和服务器。
38.作为优选,所述质量块为方形或球形或圆柱形中的一种。
39.作为优选,所述驱动机构用于驱动所述质量块跟随所述模拟卫星活动。
40.作为优选,所述推进模块被配置为驱动所述框架体跟随所述至少一个质量块活动。
41.作为优选,质量块为方形。主要负责作为惯性基准。质量块尺寸为50mm
×
50mm
×
50~100mm,质量块为不导磁的铝合金材质,质量块每个侧面镶嵌4块永磁体,底面抛光,用于系统测量。驱动机构采用电容极板。
42.本发明的有益效果为:
43.1、结构简单,可扩展性较强,既可以采用气浮平台也可以采用电动转台模拟卫星在太空中的状态。
44.2、质量块可以采用方形、球形、圆柱形等,对不同任务采用不同形态。
45.3、可以实时显示模拟状态,可以有效的验证控制方法的有效性等。
附图说明
46.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
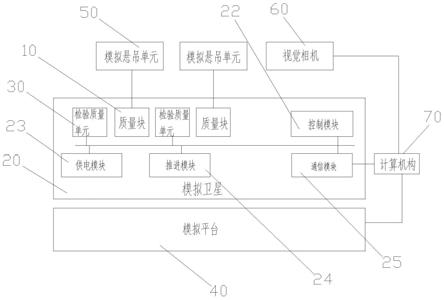
47.图1为本发明一种无拖曳航天器的地面模拟系统的部件连接框图。
48.图2为本发明一种无拖曳航天器的地面模拟系统的局部结构示意图。
49.图3为本发明一种无拖曳航天器的地面模拟系统的质量块的装配示意图。
50.图4为本发明一种无拖曳航天器的地面模拟系统的立体图。
51.图5为本发明一种无拖曳航天器的地面模拟系统的立体图。
52.图中:
53.10、质量块;
54.20、模拟卫星;21、框架体;211、标定点;22、控制模块;23、供电模块;24、推进模块;25、通信模块;26、穿过孔;
55.30、检验质量单元;31、驱动机构;32、围挡体;33、第一激光位移传感器;34、第二激光位移传感器;35、安放槽;
56.40、模拟平台;41、工作台;42、支撑托架;43、气足;
57.50、模拟悬吊单元;51、龙门架;52、悬丝;
58.60、视觉相机
59.70、计算机构。
具体实施方式
60.下面将结合实施例中的附图,对实施例中的技术方案进行清晰、完整地描述,显然,所描述的实施例仅仅是一部分实施例,而不是全部的实施例。
61.在实施例中,需要理解的是,术语“中间”、“上”、“下”、“顶部”、“右侧”、“左端”、“上方”、“背面”、“中部”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
62.另外,在本发明的描述中,需要说明的是,除非另有明确的规定和限定,安装、连接和相连等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
63.实施例
64.如图1至5所示,一种无拖曳航天器的地面模拟系统,包括质量块10、模拟卫星20、检验质量单元30、模拟平台40、模拟悬吊单元50、视觉相机60和计算机构70。模拟平台40用
于营造仿微重力环境。
65.模拟卫星20具有3
‑
6个标定点211。视觉相机60通过拍摄标定点211生成定位信息,视觉相机60配置有两个。
66.检验质量单元30用于测量模拟卫星20和质量块10的位姿信息,检验质量单元30设置在模拟卫星20内。检验质量单元30和质量块10均配置有两组。
67.进一步的,检验质量单元30包含有驱动机构31、传感器组以及围挡体32;驱动机构31用于驱动质量块10与模拟卫星20联动;传感器组具有第一激光位移传感器33和第二激光位移传感器34;围挡体32固定在模拟卫星20内,驱动机构31安装在围挡体32上;其中,围挡体32内具有安放槽35,质量块10无接触地配置在安放槽35内,围挡体32上设置有穿孔(未图示),第一激光位移传感器33设置在围挡体32上并通过穿孔面向质量块10,驱动机构31设置在围挡体32上。驱动机构31采用电容极板,通过电荷力对质量块10进行控制,从而可以实现对无拖曳控制方法的验证。
68.模拟悬吊单元50用于将质量块10悬挂在模拟卫星20内。
69.进一步的,模拟悬吊单元50包含有龙门架51以及悬丝52,悬丝用于悬吊质量块10,悬丝52的一端与龙门架51固定;视觉相机60设置在龙门架上,视觉相机面向标定点20。
70.进一步的,视觉相机60、模拟平台40、检验质量单元30和模拟卫星20均与计算机构70连接。
71.其中,计算机构70被配置为根据视觉相机60拍摄到的定位信息确定模拟卫星20位置与姿态;
72.计算机构70被配置为根据检验质量单元30检测到的位姿信息绘制运行状态图。
73.进一步的,模拟卫星20包含有框架体21、控制模块22、供电模块23、推进模块24以及通信模块25。框架体21具有穿过孔26,第二位移激光传感器设置在框架体21上,悬丝穿过该穿过孔26,悬丝与穿过孔26间隙配合,围挡体32与框架体21固定连接;供电模块23和控制模块22均安装于框架体21内;推进模块24用于推动框架体21活动,推进模块24、驱动机构和传感器组均与控制模块22电性连接;通信模块25用于与的计算机构70通讯,通信模块25与计算机构70电性连接。
74.在一些实施例中,计算机构70包含有工控机和服务器,实现指令上传、运算和数据下载等功能。
75.在一些实施例中,质量块10为方形。主要负责作为惯性基准。质量块10尺寸为50mm
×
50mm
×
50mm,质量块10为不导磁的铝合金材质,质量块10每个侧面镶嵌4块永磁体,质量块10底面抛光,用于系统测量。驱动机构31采用电容极板。
76.在一些实施例中,模拟平台40为六自由度电动转台,通过电动转台模拟卫星20六自由度的运动。
77.在一些实施例中,模拟平台40位于龙门架51的底部。模拟平台40包含有工作台41、支撑托架42、气足43和供气系统(未图示),气足43与供气系统连接,气足43设置在工作台41上,气足43支撑住模拟卫星20。整个模拟平台40具有高承载、高平面度、高水平度和长期运行稳定等特点。工作台41采用花岗岩研磨而成,具有精度高、强度大、长期运行稳定、无锈蚀等优良特点。
78.进一步的工作时:驱动机构对质量块施加主动干扰磁力,控制其微转动或平动,检
验质量单元测出位置和姿态信息,传递于控制系统,推进模块带动模拟卫星整体运动,跟踪质量块运动。
79.进一步的工作时:对模拟卫星施加主动干扰力(力矩),控制其转动或平动,检验质量单元和视觉相机记录测出模拟卫星位置和姿态信息,检验质量单元测量出质量块相对位置和姿态信息;将信息传递给计算机构;同时控制质量块跟踪卫星模拟器运动。
80.工作方法:
81.步骤一、确保各个设备正常运行;
82.步骤二、利用视觉相机60对模拟卫星20进行初始位置和姿态的标定,确定初始状态;
83.步骤三、根据任务需要,通过计算机构70将控制程序传送到模拟平台40和模拟卫星20,开始工作,系统进入无拖曳模式;
84.步骤四、由计算机构70发出控制指令使模拟平台40与检验质量单元30实现信息交互,完成模拟卫星20的姿态协同控制、无拖曳跟踪控制、质量块10与模拟卫星20防撞控制等的技术验证;
85.步骤五、工作数据传输至计算机构70,由计算机构70根据工作数据绘制运行状态图,并将工作数据和运行状态图保存。
86.本发明可以根据不同模式开展不同实验,由不同曲线显示仿真系统在实验过程中的状态变量,具体可包括:模拟卫星的位置姿态、质量块的相对位置姿态、仿真时间等。
87.本发明的有益效果为:
88.1、结构简单,可扩展性较强,既可以采用气浮平台也可以采用电动转台模拟卫星在太空中的状态。
89.2、质量块可以采用方形、球形、圆柱形等,对不同任务采用不同形态。
90.3、可以实时显示模拟状态,可以有效的验证控制方法的有效性等。
91.以上所述,仅为本发明的实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内;除非明确说明,否则本文中使用的任何元件、动作或指令都不应解释为关键或必要的。另外,如本文所用,冠词“一”和“一个”旨在包括一个或多个项目,并且可以与“一个或多个”互换使用。此外,如本文所用,冠词“该”旨在包括结合冠词“该”引用的一个或多个项目,并且可以与“一个或多个”互换使用。此外,短语“基于”旨在表示“至少部分地基于”,除非另有明确说明。另外,如在本文所用,术语“或”在被串联使用时意图是包括性的,并且可以与“和/或”互换使用,除非另有明确说明,例如,如果与“或者”或“仅其中之一”结合使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1