一种用于双足机器人踝部的路面自适应姿态控制方法与流程
1.本发明属于机器人技术领域,尤其涉及一种用于双足机器人踝部的路面自适应姿态控制方法。
背景技术:
2.双足机器人是一种基于人类仿生学结构设计,进行腿足式步态行走的机器人。腿足式结构和行走方式可为机器人在非平整路面上提供较强的通过能力和越障能力,因此机器人在此类非平整路面上的自适应和稳定控制能力尤为重要。
3.传统的机器人稳定控制方法主要基于机器人躯干处的姿态传感器信息,并通过全身动力学解算等方式,得到机器人各关节处的控制指令。该方法主要面向机器人身体的平衡,对于足踝部等机器人接触地面部分的控制效果不佳,存在以下问题:a、足踝部位于机器人腿足结构的末端,动力学解算误差较大,容易在足底处产生不充分触地等现象,影响支撑足部的稳定性。b、足踝部缺乏对路面不平度的感知,多为无力传感信息反馈的控制方式,对非平整路面的自适应能力较差,容易出现足部支撑不足的现象。c、足踝部缺乏对自身姿态的感知,通过身体姿态进行间接计算的方式速度较慢且准确度不高,影响对足踝部的控制精度。上述问题均有可能导致足踝部运动的不准确和足部支撑力的不足,甚至导致机器人整体的倾倒。
4.本发明提出的控制方法,利用足踝处布置的传感器,实现对路面不平度和自身姿态的直接感知,并根据足部实际运动状态,解算得到足部运动方向、运动速度和运动角度等控制信息,直接控制足部运动。该方法从足踝部获取各类传感信息并仅用于控制踝部运动,相较传统方法在控制准确性和效率方面均有提升。
技术实现要素:
5.本发明针对目前双足机器人踝足部分控制方法存在的问题,提供一种用于双足机器人踝部的路面自适应姿态控制方法。本发明通过在机器人足踝部添加传感器采集关键信息,获知路面不平度、足部倾斜度等影响足踝部运动的参数,并综合足踝部运动状态、驱动方式和具体结构等,由算法解算得到踝部驱动电机的控制指令,实现机器人足踝部自身的稳定以及对非平整路面的自适应控制,取得了较好的效果。
6.本发明的目的是通过以下技术方案来实现的:一种用于双足机器人踝部的路面自适应姿态控制方法,包括如下步骤:
7.s1、采集机器人足底力传感器的信息,经放大滤波后,转换为压力信号;根据传感器在足底的实际位置对压力信号进行区域划分,并据此得到足部各区域压力分布;
8.s2、由步骤s1得到的足部区域压力分布,根据传感器在足底的位置,得到路面凸起在机器人足底的分布情况,处理得到路面不平度信息;
9.s3、再通过布置于机器人小腿部的倾角传感器采集的信息,处理得到机器人小腿姿态;
10.s4、根据步骤s3得到的小腿姿态,得到足部倾斜度信息;
11.s5、通过步骤s2得到的路面不平度和步骤s4得到的足部倾斜度信息,得到机器人足部稳定所需的运动状态;
12.s6、根据步骤s5得到的运动状态判断足部实际所需执行的命令,所述足部所需执行的命令包括驱动、停止或复位命令;
13.s7、由步骤s5和s6得到的足部稳定所需运动状态和足部所需执行的命令,解算得到踝关节电机的运动角度;
14.s8、基于步骤s7得到的踝关节电机运动角度,驱动踝关节各电机,控制足部运动。
15.进一步地,所述步骤s1中,所述足底力传感器为均匀分布在足底的压力传感器阵列。
16.进一步地,所述步骤s3中,对安装于机器人小腿处的倾角传感器电信号进行采集,滤除其中的噪声,并转换为实际倾角数据;根据倾角传感器所在的实际位置和小腿结构,得到小腿姿态角。
17.进一步地,所述步骤s4中,将小腿姿态角转化为足部倾斜度信息,得到机器人足部在前倾、侧倾两个自由度上的倾斜情况。
18.进一步地,所述步骤s5中,通过步骤s2得到的路面不平度和步骤s4得到的足部倾斜度信息,得到机器人足部稳定所需运动状态,即足部在踝关节两个自由度方向上的运动方向和角度;
19.根据足底压力分布情况得到的足部运动方向为:
[0020][0021]
其中,pf为足部向前转动,pb为足部向后转动,rl为足部向左转动,rr为足部向右转动,f1为足部左前区域受力,f2为足部右前区域受力,f3为足部左后区域受力,f4为足部右后区域受力。
[0022]
上述结果结合小腿倾角传感器得到的足部倾斜度后,得到足部运动角度为:
[0023][0024]
其中,θ
p
为足部前倾转动角,θ
pf
为足部当前前倾角,为小腿俯仰角,θr为足部左倾转动角,θ
rf
为足部当前左倾角,为小腿滚转角,pf为足部向前转动,pb为足部向后转动,rl为足部向左转动,rr为足部向右转动。
[0025]
进一步地,所述步骤s6中,基于前述判断的路面信息,以及足部稳定所需运动状态,结合足部当前实际运动状态,判断足部执行驱动、停止或是复位命令。该判断过程的步骤如下:
[0026]
步骤一,由各标志位状态,结合倾角传感器数据判断运动标志位,即
[0027][0028]
其中,fm为运动标志位值,θ
pf
为足部当前前倾角,θ
rf
为足部当前左倾角;fm=1为足部向前转动,fm=2为足部向后转动,fm=3为足部向左转动,fm=4为足部向右转动。
[0029]
步骤二,由各标志位状态,结合压力传感器数据判断复位标志位,即
[0030][0031]
其中,fz为复位标志位值,ff为足底压力数值,fm为运动标志位值。
[0032]
步骤三,由各标志位状态,判断停止标志位,即
[0033][0034]
其中,fs为停止标志位值,fz为复位标志位值,fm为当前运动标志位值,f
mf
为前一条命令中的运动标志位值。
[0035]
步骤四,由当前各标志位的值,判断发送命令的类型,即
[0036][0037]
其中,fs为停止标志位值,fz为复位标志位值,fm为运动标志位值,move即足部运动,stop即足部停止,zero即足部复位。
[0038]
进一步地,所述步骤s7中,若步骤s6得到的命令为足部运动命令,则通过踝部驱动方式和足部实际结构尺寸,解算得到踝部驱动电机运动角度,解算公式为:
[0039][0040]
其中,δ
p1
为驱动电机1在足部俯仰方向上的运动距离,δ
p2
为驱动电机2在足部俯仰方向上的运动距离,δ
r1
为驱动电机1在足部滚转方向上的运动距离,δ
r2
为驱动电机2在足部滚转方向上的运动距离,l
l
为驱动连杆长,la为连杆足部铰接端与踝部在足部俯仰方向上的距离,θ0为连杆足部铰接端与踝部连线与足底面的夹角,θ
p
为足部前倾转动角,ls为连杆电机铰接端与踝部水平距离,ld为连杆电机铰接端与踝部初始垂直距离,l
θ
为连杆在腿部的投影长度,d
l
为连杆足部铰接端与踝部在足部滚转方向上的距离,θr为足部左倾转动角,da为连杆足部铰接端与踝部在足部俯仰方向上的垂直距离。
[0041]
本发明的有益效果在于:本发明直接从机器人与地面相接触的足踝部获取传感信息,并将足踝部视为一单独系统,通过本发明控制方法直接控制足踝部运动。该方法无需进行全身姿态解算等复杂缓慢计算过程,便可以实现机器人踝部对路面的自适应控制,对于
足踝部运动控制而言,方法较简洁且控制效率较高。
附图说明
[0042]
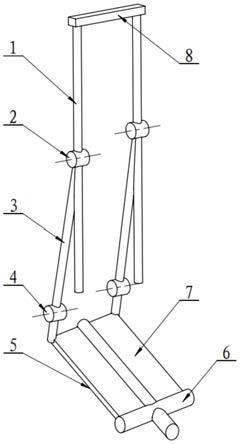
图1是本发明实施例的结构简化示意图;
[0043]
图2是本发明实施例在足部俯仰方向的简化示意图;
[0044]
图3是本发明实施例在足部滚转方向的简化示意图;
[0045]
图中,1-直线驱动器、2-连杆电机铰接端、3-驱动连杆、4-连杆足部铰接端、5-足底力传感器、6-二自由度踝关节、7-足部本体、8-腿部倾角传感器。
具体实施方式
[0046]
以下结合附图对本发明作进一步说明。
[0047]
本发明的技术构思在于:针对双足机器人传统控制方法对足踝部控制效果不佳的问题,充分利用在足踝处布置的传感器数据,将踝足和小腿部分从机器人本体中分离开,视为一个单独的控制单元,并根据该部分的特点使用单独的稳定性控制方法,实现踝足部分对非平整路面的自适应过程,同时兼顾到踝足部分与机器人本体的关系,在控制踝部适应路面的同时,保持小腿等部分的稳定,为机器人全身姿态稳定控制提供保障。
[0048]
本发明实施例提供了一种双足机器人踝部结构,包括直线驱动器1、连杆电机铰接端2、驱动连杆3、连杆足部铰接端4、足底力传感器5、二自由度踝关节6、足部本体7和腿部倾角传感器8。所述直线驱动器1和驱动连杆3通过连杆电机铰接端2铰接,所述驱动连杆3通过连杆足部铰接端4与足部本体7铰接。所述足部本体与二自由度踝关节6连接。所述足底力传感器5置于足部本体7底部。所述腿部倾角传感器8置于直线驱动器l上方。
[0049]
参照图1-3,一种用于双足机器人踝部的路面自适应姿态控制方法,包括如下步骤:
[0050]
s1、采集所有机器人足底力传感器的信息,对采集到的电信号经放大滤波后,转换为对应的实际压力数据。所述机器人足底力传感器为压力传感器阵列,均匀排列在足底。根据力传感器所在足底的实际位置对压力信号进行区域划分,并据此得到足部各区域压力分布。
[0051]
s2、将步骤s1得到的足部区域压力分布,根据各压力区域内的传感器数据和传感器在足底的实际位置,得到路面凸起相对于足底所在的具体位置。整理路面凸起所在的具体位置得到路面不平度信息。
[0052]
s3、对安装于机器人小腿处的倾角传感器电信号进行采集,滤除其中的噪声,并转换为实际倾角数据。根据倾角传感器所在的实际位置和小腿结构,得到小腿姿态角。
[0053]
s4、将小腿姿态角转化为足部倾斜度信息,得到机器人足部在前倾、侧倾两个自由度上的倾斜情况。
[0054]
s5、综合路面不平度和足部倾斜度信息,得到机器人稳定所需的足部运动状态;
[0055]
通过步骤s2得到的路面不平度信息得到足部适应该地面所需运动方向,综合步骤s4得到的足部倾斜度信息,得到机器人足部稳定所需运动状态,即足部在踝关节两个自由度上的运动方向和角度。
[0056]
根据足底压力分布情况推算路面不平度信息得到的足部运动方向具体为:
[0057][0058]
其中,pf为足部向前转动,pb为足部向后转动,rl为足部向左转动,rr为足部向右转动,f1为足部左前区域受力,f2为足部右前区域受力,f3为足部左后区域受力,f4为足部右后区域受力。
[0059]
上述结果结合小腿倾角传感器得到的足部倾斜度后,得到足部运动角度为:
[0060][0061]
其中,θ
p
为足部前倾转动角,θ
pf
为足部当前前倾角,为小腿俯仰角,θr为足部左倾转动角,θ
rf
为足部当前左倾角,为小腿滚转角。
[0062]
在本发明实施例中,根据足底压力分布情况,若已知f1=18n为足部左前区域受力,f2=17n为足部右前区域受力,f3=33n为足部左后区域受力,f4=32n为足部右后区域受力,得到的足部运动方向为:
[0063]
pf,f1+f2<f3+f4[0064]
即足部向前转动。
[0065]
此时加入由小腿倾角传感器得到的足部倾斜度后,若已知θ
pf
=5.3
°
为足部当前前倾角,为小腿俯仰角,则足部运动角度为
[0066][0067]
s6、基于前述判断的路面信息,以及各传感器数据反馈以及足部稳定所需运动状态,结合足部当前实际运动状态,得到的足部运动方向和角度,决定足部应执行驱动、停止或是复位命令,并在程序中更新相应标志位。足部运动控制模块在读取各标志位信息后,按照一定的判断方式发送足部运动命令。该判断过程的步骤如下:
[0068]
s601,由各标志位状态,结合倾角传感器数据判断运动标志位,即:
[0069][0070]
其中,fm为运动标志位值,θ
pf
为足部当前前倾角,θ
rf
为足部当前左倾角。fm=1为足部向前转动,fm=2为足部向后转动,fm=3为足部向左转动,fm=4为足部向右转动。
[0071]
若已知足部当前前倾角为θ
pf
<0,则运动标志位fm=1。
[0072]
s602,由各标志位状态,结合压力传感器数据判断复位标志位,即:
[0073][0074]
其中,fz为复位标志位值,ff为足底压力数值,fm为运动标志位值。
[0075]
若已知fz=0为复位标志位值,ff=0为足底压力数值,则复位标志位fz=1。
[0076]
,则运动标志位。
[0077]
s603,由各标志位状态,判断停止标志位,即:
[0078][0079]
其中,fs为停止标志位值,fz为复位标志位值,fm为当前运动标志位值,f
mf
为前一条命令中的运动标志位值。
[0080]
若已知fs=1为停止标志位值,fz=1为复位标志位值,则停止标志位fs=0。
[0081]
s604,由当前各标志位的值,判断发送命令的类型,即
[0082][0083]
其中,fs为停止标志位值,fz为复位标志位值,fm为运动标志位值,move即足部运动,stop即足部停止,zero即足部复位。
[0084]
若已知fs=0为停止标志位值,fz=0为复位标志位值,则发送足部运动命令。
[0085]
s7、由步骤s5和s6得到的足部稳定所需运动状态和足部所需执行的命令,通过踝部驱动方式和足部实际结构尺寸,解算得到踝关节电机运动角度,公式如下:
[0086][0087]
其中,以右脚为例,δ
p1
为足内侧驱动电机在足部俯仰方向上的运动距离,δ
p2
为足外侧驱动电机在足部俯仰方向上的运动距离,δ
r1
为足内侧驱动电机在足部滚转方向上的运动距离,δ
r2
为足外侧驱动电机在足部滚转方向上的运动距离,l
l
为驱动连杆长,la为连杆足部铰接端与踝部在足部俯仰方向上的距离,θ0为连杆足部铰接端与踝部连线与足底面的夹角,θ
p
为足部前倾转动角,ls为连杆电机铰接端与踝部水平距离,ld为连杆电机铰接端与踝部初始垂直距离,l
θ
为连杆在腿部的投影长度,d
l
为连杆足部铰接端与踝部在足部滚转方向上的距离,θr为足部左倾转动角,da为连杆足部铰接端与踝部在足部俯仰方向上的垂直距离。
[0088]
在本发明实施例中,若已知l
l
=100mm为驱动连杆长,la=83.5mm为连杆足部铰接端与踝部在足部俯仰方向上的距离,θ0=16.7
°
为连杆足部铰接端与踝部连线与足底面的夹角,θ
p
=15
°
为足部前倾转动角,ls=44mm为连杆电机铰接端与踝部水平距离,ld=117.3mm为连杆电机铰接端与踝部初始垂直距离,d
l
=23mm为连杆足部铰接端与踝部在足部滚转方向上的距离,θr=15
°
为足部左倾转动角,da=24mm为连杆足部铰接端与踝部在足部俯仰方向上的垂直距离,则解算得到的各参数为:
[0089][0090]
s8、基于步骤s7得到的踝关节电机运动角度,驱动踝关节各电机,控制足部运动和姿态。
[0091]
上述实施例仅仅是本发明技术构思实现形式的列举,本发明的保护范围不仅限于上述实施例,本发明的保护范围可延伸至本领域技术人员根据本发明的技术构思所能想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1