一种智能制造机械加工生产线AGV小车控制方法
一种智能制造机械加工生产线agv小车控制方法
技术领域
1.本发明应用于agv小车控制领域,具体是一种智能制造机械加工生产线agv小车控制方法。
背景技术:
2.agv小车指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源。一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道(electromagnetic path-following system)来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
3.现有的agv小车多数采用电磁轨道或者预设变成轨道进行导航,但却缺乏相应的避障能力,当规划轨道上出现例如加工生产线附近掉落的螺钉扳手等杂碎障碍物时,agv小车无法有效识别到,因此如何使agv小车能够有效识别前进路径上的障碍物是本领域需要解决的关键技术问题。
技术实现要素:
4.本发明所要解决的技术问题是针对现有技术的不足,提供一种智能制造机械加工生产线agv小车控制方法。
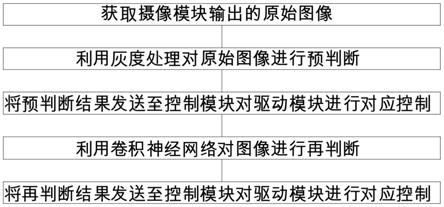
5.为解决上述技术问题,本发明的一种智能制造机械加工生产线agv小车控制方法,所述agv小车包括用于拍摄其前行路况的摄像模块、用于带动其移动的驱动模块和用于控制所述驱动模块工作的控制模块;所述agv小车控制方法包括如下步骤:
6.获取摄像模块输出的原始图像;
7.利用灰度处理对原始图像进行预判断;
8.将预判断结果发送至控制模块对驱动模块进行对应控制;
9.利用卷积神经网络对图像进行再判断;
10.将再判断结果发送至控制模块对驱动模块进行对应控制。
11.作为一种可能的实施方式,进一步的,所述利用灰度处理对原始图像进行预判断步骤包括:
12.获取特征区域图;
13.获取阴影图形;
14.获取物体图形;
15.将阴影图形与物体图形进行比对判断。
16.作为一种可能的实施方式,进一步的,所述获取特征区域图步骤具体为:
17.按照预设的检测点对获取的原始图像进行灰度值的遍历检测,获得各检测点的灰度值;
18.对灰度值差值达到预设差值的相邻检测点进行标记,并将被标记的检测点进行矩
形框选并截取为特征区域图。
19.作为一种可能的实施方式,进一步的,所述获取阴影图形步骤具体为:
20.按照预设检测点对特征区域图进行灰度值的遍历检测,获得各检测点的灰度值;
21.将灰度值在预设范围内的检测点标记为阴影点,将标记的阴影点连接为封闭图形;
22.对阴影点连接的封闭图形的两端长度最值与宽度最值进行测量。
23.作为一种可能的实施方式,进一步的,所述获取物体图形的步骤具体为:
24.按照预设检测点对特征区域图进行灰度值的遍历检测,获得各检测点的灰度值;
25.将灰度值在预设范围内的检测点标记为物体点,将标记的物体点连接为封闭图形;
26.对物体点连接的封闭图形的两端长度最值与宽度最值进行测量。
27.作为一种可能的实施方式,进一步的,所述将阴影图形与物体图形进行比对判断的步骤具体为:将阴影点和物体点连接的封闭图形进行合理性比对,输出比对判断合理与否的结果。
28.作为一种可能的实施方式,进一步的,所述将预判断结果发送至控制模块对驱动模块进行对应控制步骤具体包括:
29.控制模块接收阴影图形与物体图形是否合理匹配的预判断结果;
30.若所述预判断结果为合理匹配,则判断物体图形中的物体为实物,所述控制模块发送缓行或避让指令至驱动模块;
31.若所述预判断结果为不合理匹配,则判断物体图形中的物体为非实物,所述控制模块发送正常行驶指令至驱动模块。
32.作为一种可能的实施方式,进一步的,所述利用卷积神经网络对图像进行再判断步骤具体包括:
33.将所述获取特征区域图步骤中截取的特征区域图作为特征提取图像;
34.利用rpn网络判别特征提取图像中的物体和阴影,并对物体所在的位置进行回归处理。
35.作为一种可能的实施方式,进一步的,所述利用rpn网络判别特征提取图像中的物体和阴影,并对物体所在的位置进行回归处理的步骤具体包括:
36.对特征提取图像进行卷积操作,并以特征图像中的像素点为中心形成若干锚点,以预设的矩形框进行候选框选取操作;
37.所述rpn网络中的分类层对所述候选框进行判别,求出候选框内的是物体还是阴影的分数;
38.所述rpn网络层中的回归层对选取出来的总候选框个数进行回归操作提取出物体和阴影在图像中的位置信息。
39.作为一种可能的实施方式,进一步的,
40.所述将灰度值在预设范围内的检测点标记为阴影点步骤中的预设范围为灰度值在0-110之间;
41.所述将灰度值在预设范围内的检测点标记为物体点,步骤中的预设范围为灰度值在110-255之间。
42.本发明采用以上技术方案,具有以下有益效果:
43.本发明利用灰度处理和卷积神经网络处理对原始图依序进行处理判断,并将结果发送至控制模块对驱动模块进行控制达到精准控制agv小车的目的,解决了当规划轨道上出现例如加工生产线附近掉落的螺钉扳手等杂碎障碍物时,agv小车无法有效识别的问题。同时本发明卷积神经网络处理直接获取灰度处理的特征图作为特征提取图进行处理,大幅缩短了计算处理的时间,提高了方案的时效性。
附图说明
44.下面结合附图与具体实施方式对本发明做进一步详细的说明:
45.图1为本发明原理流程示意图;
46.图2为本发明特征区域获取界面示意图;
47.图3为本发明阴影图形与物体图形判断界面示意图。
具体实施方式
48.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。
49.如图1所示,本发明提供了一种智能制造机械加工生产线agv小车控制方法,所述agv小车包括用于拍摄其前行路况的摄像模块、用于带动其移动的驱动模块和用于控制所述驱动模块工作的控制模块;所述agv小车控制方法包括如下步骤:
50.获取摄像模块输出的原始图像;
51.利用灰度处理对原始图像进行预判断;包括:如图2所示的获取特征区域图;进一步的,所述获取特征区域图步骤具体为:按照预设的检测点对获取的原始图像进行灰度值的遍历检测,获得各检测点的灰度值;对灰度值差值达到预设差值的相邻检测点进行标记,并将被标记的检测点进行四边形框选并截取为特征区域图。获取阴影图形;进一步的,所述获取阴影图形步骤具体为:按照预设检测点对特征区域图进行灰度值的遍历检测,获得各检测点的灰度值;将灰度值在预设范围内的检测点标记为阴影点,将标记的阴影点连接为封闭图形;对阴影点连接的封闭图形的两端长度最值与宽度最值进行测量。获取物体图形;所述获取物体图形的步骤具体为:按照预设检测点对特征区域图进行灰度值的遍历检测,获得各检测点的灰度值;将灰度值在预设范围内的检测点标记为物体点,将标记的物体点连接为封闭图形;对物体点连接的封闭图形的两端长度最值与宽度最值进行测量。将阴影图形与物体图形进行比对判断。具体为:将阴影点和物体点连接的封闭图形进行合理性比对,输出比对判断合理与否的结果。
52.光源方向结合判断方案:
53.(1)在agv小车本体外壁圆周式环绕设置光源检测设备以检测小车所处位置的实时光源方向并将检测数据实时上传;
54.(2)获取实时光源方向检测数据并将其与阴影图形和物体图形的相对位置数据与尺寸测量数据结合比对其阴影图形与物体图形的位置尺寸的合理性;
55.(3)将合理性比对结果发送至控制模块对驱动模块进行对应控制。
56.作为一种可能的实施方式,进一步的,
57.所述将灰度值在预设范围内的检测点标记为阴影点步骤中的预设范围为灰度值在0-110之间;
58.所述将灰度值在预设范围内的检测点标记为物体点,步骤中的预设范围为灰度值在110-255之间。
59.将预判断结果发送至控制模块对驱动模块进行对应控制;具体包括:
60.控制模块接收阴影图形与物体图形是否合理匹配的预判断结果;
61.若所述预判断结果为合理匹配,则判断物体图形中的物体为实物,所述控制模块发送缓行或避让指令至驱动模块;
62.若所述预判断结果为不合理匹配,则判断物体图形中的物体为非实物,所述控制模块发送正常行驶指令至驱动模块。
63.利用卷积神经网络对图像进行再判断;具体包括:
64.将所述获取特征区域图步骤中截取的特征区域图作为特征提取图像;
65.如图3所示利用rpn网络判别特征提取图像中的物体和阴影,并对物体所在的位置进行回归处理。
66.作为一种可能的实施方式,进一步的,所述利用rpn网络判别特征提取图像中的物体和阴影,并对物体所在的位置进行回归处理的步骤具体包括:
67.对特征提取图像进行卷积操作,并以特征图像中的像素点为中心形成若干锚点,以预设的矩形框进行候选框选取操作;
68.所述rpn网络中的分类层对所述候选框进行判别,求出候选框内的是物体还是阴影的分数;
69.所述rpn网络层中的回归层对选取出来的总候选框个数进行回归操作提取出物体和阴影在图像中的位置信息。
70.将再判断结果发送至控制模块对驱动模块进行对应控制。
71.以上所述为本发明的实施例,对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理和精神的情况下凡依本发明申请专利范围所做的均等变化、修改、替换和变型,皆应属本发明的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1