用于车辆的处理系统的制作方法
1.本发明涉及一种用于车辆的处理系统。尤其地,本发明涉及一种用于控制车辆的驾驶功能的处理系统。
背景技术:
2.针对车辆的驾驶功能的自动化需要性能足够强大的处理系统,以便实施用于信息处理的当前构思,例如以便自动识别车辆的环境中的对象并对其做出适当的反应。附加地,处理系统必须应满足对功能可靠性的最高要求并且至少在某些的故障状态方面是容忍的。
3.优选地,处理系统应满足例如在iso 26262中限定的且尤其是在asil(automotive safety integrity level,汽车安全完整性等级)级别中限定的要求。此外,处理系统应尽可能是可扩充的,以便针对未来的仍未知的要求做好准备。
技术实现要素:
4.本发明的任务是提供在车辆上使用的改进的处理系统。本发明借助独立权利要求的主题来解决该任务。从属权利要求反映了优选的实施方式。
5.在车辆上使用的处理系统包括:多个单处理器;多个并行处理器;用于与车辆的通信总线连接的接口;以及监控装置,监控装置与接口和处理器中的每个处理器连接。在此,监控装置被设立成用于使单处理器彼此间冗余配置和/或并行处理器彼此间冗余配置。
6.处理系统可以为故障操作系统(fail operational system)提供可扩展且冗余的硬件平台。这样的系统被设计成具有复原力的并且即使当其控制系统发生故障到预定程度时也应继续工作正常。相比之下,故障安全系统(fail safe system)则是被设立成用于在发生故障时可以承担安全状态。这种状态一般不存在于对车辆的控制中,这是因为车辆本身即使在停车时可能也会对行驶中的车辆表现出危险或被该行驶中的车辆危及到。
7.所提出的设施可以允许在不同级别上(例如在asil-b和asil-d上)进行“本地分解(native decomposition)”。如果要处理传感器值,则所提出的处理系统可以允许基于相同目的的不同传感器或传感器组实施不同的过程或算法。由此,可以使分裂(分解)和仲裁都成为可能。当一个或多个单处理器和/或并行处理器发生故障时,处理系统仍然可以具有运转能力。总体而言,处理系统在运行中可以满足高达d级的asil要求。
8.单处理器优选具有相同的结构类型,并且并行处理器优选具有相同的结构类型。处理系统可以包括计算机的另外的结构元件,例如时钟发生器、易失性和/或非易失性的存储器或输入/输出系统。处理器可以安装在电路板上并电连接。在一个实施方式中,设置有冷却体,以便从一个或多个处理器、尤其是并行处理器排出废热。为此,这些处理器的贴靠面可以位于共同的平面中,并且冷却体可以具有用于待冷却的处理器的平坦的贴靠面。冷却体可以是主动冷却系统的一部分,该主动冷却系统可以包括闭合的流体冷却部。流体冷却部尤其可以作为液体冷却部实现。
9.处理系统可以被设立成用于处理与安全相关的任务。在此,故障或失灵可能对车
辆上或其周围环境中的人员或物体的安全产生直接或间接的影响。
10.已认识到,由传统的单处理器和并行处理器构成的组合最适合在车辆上、尤其是在机动车辆上的控制任务。尤其地,单处理器可以接受难以并行化或甚至不可能并行化的任务,例如对参量的迭代的或递归的计算。相反,并行处理器可以接受能以改进的方式并行化的任务,这些任务尤其可能与识别车辆的周围环境有关。并行处理器还可以优选地被设立成用于识别数据中的图案,尤其是识别图像中的对象、融合数据、计算线性代数、实现人工神经网络或完成人工智能任务。
11.尤其是对于与安全相关的应用有利的是,处理器不单独运行,而是在冗余配置中运行。为此,处理系统尤其可以包括多个冗余配置的单个处理器和多个冗余配置的并行处理器。如果处理系统的失效可能影响整个处理系统的功能,通常优选的是,处理系统的部件不只实施一次。单处理器可以双重设置。并行处理器尤其可以四重设置。
12.冗余在此不一定必须在处理器层级上实现。相反,多个并行处理器可以以如下方式运行,即,使得它们看起来像是针对待处理的问题的唯一的处理环境。对故障或失灵的冗余或复原力可以固有地通过分布式的数据之间的相邻关系来实现。如果一个处理装置失灵,则其结果虽然可能是错误的,但只会影响正在处理的其中一部分问题。相反,整个问题,例如识别图像中的对象仍然可以总是被正确解决。
13.替选地,所有并行处理器的处理装置例如也可以在冗余配置中被一起运行。所提出的单处理器和并行处理器的配置可以允许执行车辆的运动控制,从而例如可以实现根据sae j3016的四(高度自动化)或五(全自动化)的自主程度。
14.监控装置可以被设立成用于确定单处理器之一或并行处理器之一是否带故障工作。在此,监控装置可以包括处理装置,处理装置被设立成用于监控其他处理器中的一个或多个。来自所联接的处理器的结果或状态可以通过监控装置进行相互比较或与预定的阈值或区间槛限进行比较,以便确定故障。监控装置可以实施安全功能,其中,可以满足预定的asil安全等级,优选高达等级asil-d。
15.监控装置通常借助监控总线与处理器连接,其中,监控总线通常仅提供大约100mbit/s的中等带宽,但优选根据iso 26262实施为与安全相关的接口。
16.如果确定其中一个处理器带故障工作,则可以在通向车辆的接口上提供信号,以便向车辆上的其他部件发出失灵的信号。被识别为失灵的处理器可以被关断或以如下方式重新配置,即,使得由该失灵的处理器所包括的失灵的部件尽可能不再对处理结果做贡献。在一个实施方式中,处理器或由其所包括的部件也可以被关断。因此可以在很大程度上或完全地防止在通信总线上提供不正确的信息。
17.单处理器通常具有传统的架构,并且例如可以源自x86、x64或arm系列。单处理器可以具有多个内核(cores),其中,即使当单处理器已发布最多64个内核时,内核的数量通常也被限制在8个或更少。单处理器的时钟频率通常高于并行处理器的时钟频率。
18.并行处理器通常包括比单处理器明显更多的处理装置。例如,并行处理器可以被构造为专用的图形处理器,并且包括数千个处理装置(例如“着色器”)。替选地,并行处理器也可以实现为fpga,其包括大量可以通过配置而彼此互连的元件,以便例如形成大量的处理装置。并行处理器也可以被设立成用于实现神经网络,并且可以包括大量人工神经元,在此基础上可以配置网络。
19.优选地,每个处理器都被安置在专用的半导体壳体中。半导体壳体优选被设立成用于装配在电路板上并且尤其可以包括bga壳体(ball grid array;球栅阵列),在其中设置有以球栅布局的电接口。电路板可以与处理器以及可能的另外的结构元件一起作为能单独操纵的单元存在。然而,在共同的半导体壳体中布置多个处理器也是可能的。
20.并行处理器可以借助通信总线完全相互连接。如果设置有n个并行处理器,则每个并行处理器可以借助专用的线路与每个其他并行处理器连接。在这种情况下,可以设置有条通信总线。处理器之间的通信总线也被称为处理器间总线(inter processor communication,ipc),并且优选提供非常高的大约100gbit/s或更高的带宽。
21.并行处理器可以具有用于分别连接多个成像的传感器的传感器接口,其中,并行处理器优选被设立成用于对所连接的传感器提供的图像数据进行处理。传感器例如可以包括相机、深度相机、立体相机、雷达传感器、lidar传感器、超声波传感器或类似传感器。在一个特别优选的实施方式中,设置有四个并行处理器;同样优选地,并行处理器可以与四个成像的传感器连接。可以使用fci接口用于与传感器连接。
22.处理系统优选被设立成用于借助通信总线上的信号来控制车辆的驾驶功能。通过如下方式直接进行控制,即,为纵向和/或横向控制提供目标值或控制信号。替选地,控制也可以通过如下方式间接进行,即,处理系统在通信总线上提供代表车辆当前周围环境中的对象的数据,其中,依赖于对象来进行对车辆的控制。
23.处理系统还可以包括至少两个冗余的通信模块。在此,通信模块可以与每个单处理器和每个并行处理器连接。通信模块优选向处理器提供大约1gbit/s或更高的高带宽;这种连接也被称为快速通信接口(fast communication interface,fci)。
24.通信模块可以分别具有用于与另外的处理系统连接的通信接口。尤其地,所连接的处理系统可以相应于在此描述的处理系统。所连接的处理系统可以具有与本处理系统相同或不同的拓扑结构。
25.根据本发明的另外的方面,系统包括多个彼此连接的处理系统,其中至少一个是在此描述的类型。
26.根据本发明的又一另外的方面,车辆包括至少一个在此所述的处理系统。尤其地,车辆可以被设立成用于借助处理系统在车辆运动方面进行控制。
附图说明
27.现在将参考附图更详细地描述本发明,该附图示出了处理系统。
具体实施方式
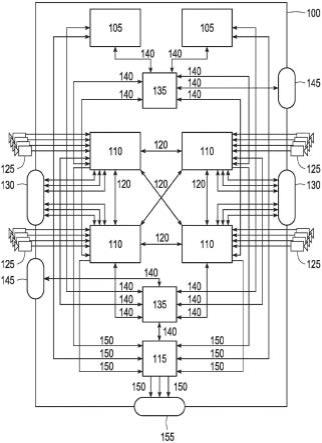
28.图1示出了示范性的处理系统100,其尤其被设立成用于在车辆上运行。处理系统100包括两个单处理器105和四个并行处理器110、以及监控装置115。单处理器105的数量可以与并行处理器110的数量无关地确定。在一个实施方式中,为一个或多个另外的单处理器105和/或并行处理器110设置有形式例如为插槽的接口,从而可以使用附加的处理器105、110用于提高性能。所存在的处理器105、110可以在其插槽方面是能互换的。处理系统100可以被设立得配备有不同的处理器105、110,以便可以根据要求例如形成廉价的、节能的或性
能强大的处理系统100。
29.单处理器105可以是冗余配置的,从而使得它们基本上执行相同的确定并且使得单处理器105的某些值或状态之间的可能偏差借助监控装置115来确定。监控装置115可以只单一地设置在处理系统100中。优选地,监控装置115本身被实施成满足预定的安全要求,例如根据asil-d的安全要求。
30.并行处理器110同样可以是冗余配置的。也可以将两个更或多个并行处理器110协同地配置成增强的并行处理器110。并行处理器110优选借助ipc总线120彼此连接。更优选地,每个并行处理器110借助专用的ipc总线120与每个另一并行处理器110连接。可以设置另外的ipc总线120,以便将传感器125与并行处理器110连接起来。为此,可以在处理系统100上设置传感器接口130,该传感器接口尤其可以具有插塞连接部。
31.传感器125优选被设立成用于感测车辆周围的环境、内部空间或行驶状态。尤其地,传感器125可以是通过如下方式成像的,即,传感器提供以至少两个维度来组织的数据,这些维度与和车辆相关的几何维度相关联。示例性的成像的传感器125包括相机、雷达传感器和lidar传感器。也可以联接非成像的传感器125,例如声学传感器125。在一个实施方式中,将用于感测物理参数的一个或多个传感器125安装在车辆的驱动马达上。可以设立另外的传感器125以用于确定车辆的行驶状态并且可以例如检测定位、速度、偏航率或加速度。
32.优选地设置有至少一个通信模块135,其进一步优选地被设立成用于将多个通信总线140集束并且能够实现对与通信总线140连接的元件进行有序通信。集束可以在iso-osi模型中例如在第2或第3层上进行。通信总线140也可以被称为fci。优选地设置有用于将通信模块135与处理器105、110中的每个处理器连接起来的各一个通信总线140。
33.更优选地,还设置有至少一个另外的通信模块135,其借助单独的通信总线140与处理器105、110连接,从而使得在处理器105、110之间存在冗余的通信路径。
34.通过所提出的借助ipc总线150和通信总线140对并行处理器110的连接可以在多达三个层级上实现冗余:借助ipc总线150实施一次,并且借助通信总线140实施两次。
35.处理系统100可以包括借助另外的通信总线140与通信模块135连接的通信接口145。如果设置了多个通信模块135,则可以给每个通信模块配属自己的通信接口145。
36.监控装置115优选借助监控总线150与处理器105、110中的每个处理器连接。在此,更优选地使用点对点连接,以便避免尤其是在发生故障情况时相互影响。设置有一个或多个另外的监控总线150以用于将监控装置115与处理系统100的接口155连接起来。接口155被设立成用于与车辆的通信总线连接,该通信总线例如可以包括can总线、flexray总线或lin总线。
37.监控装置115可以涵盖多个功能。第一个功能可以是对处理器105、110进行监控。第二个功能可以履行对用于控制车辆上的功能的控制值的确定、尤其是用于控制行驶驾驶功能的控制值的确定。
38.第三个功能可以是接受来自处理器105、110的确定结果。此外,在第四个功能中,监控装置115可以经由接口155与车辆的系统、子系统或执行器通信。为此,监控装置115尤其可以经由接口155提供先前接收到的确定结果和/或接纳对处理系统100的外部请求。所接收的请求可以以适当的方式转发给处理器105、110。
39.附图标记列表
40.100处理系统
41.105单处理器
42.110并行处理器
43.115监控装置
44.120ipc总线、处理器间的通信总线
45.125传感器
46.130传感器接口
47.135通信模块
48.140通信总线
49.145通信接口
50.150监控总线
51.155用于车辆的通信总线的接口。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1