基于5G云化的全地形移动机器人控制器及其调度系统
基于5g云化的全地形移动机器人控制器及其调度系统
技术领域
1.本发明涉及机器人控制技术领域,具体为基于5g云化的全地形移动机器人控制器及其调度系统。
背景技术:
2.当前全地形移动机器人涉及较多应用领域,四轮差速滑动转向作为全地形独立移动机器人常用的一种结构,因结构简单可靠、运行灵活稳定、适应地形广泛、控制简单等优点,广泛运用于全地形移动机器人。但是,四轮差速滑动转向全地形独立移动机器人在加上减振机构之后,对于四轮的力矩分配有需求,因而需要全地形移动机器人控制系统对四轮的转动力矩进行协调控制。
3.如中国专利申请号为201910899794.2,提出的“一种基于ros调度系统的农场用全地形独立悬架移动机器人”,该专利中采用的是独立悬架结构用以缓解车身振动,但悬架调节问题只适用于单一地形,不能因地形而改变悬架刚度;在移动机器人复杂路面行驶过程中,特别在其转向时,由于振动,四轮与地面摩擦力不一,电机输出扭矩不一,无法实现对四轮的转动力矩进行协调控制。
4.又如,中国专利公开号为cn107314770b,提出的“一种移动机器人及其主控制器、定位系统与方法”,该专利公开了移动机器人基于拍摄图形码的绝对位置坐标,据此设计位置补偿的运动控制器,但不能根据因地形变化以及车身悬架自适应的姿态改变,由此设计的基于动力学参数补偿的运动控制器设计及调度系统实现,不能在未知地形实现高精度定位行走和多车作业调度。
5.此外,多个全地形独立悬架移动机器人使用时,需完成协调工作,构建一套调度系统,使得多台移动机器人协同作业时进行统一规划和调度,能够高效的配合完成较复杂的任务。基于5g云化的全地形移动机器人可以通过5g通信实现调度系统对于多台全地形移动机器人的控制,完成更加复杂的工作,提高工作效率。
技术实现要素:
6.为了满足全地形移动机器人四轮的力矩分配需求,实现四轮的转动力矩协调控制以及实现多台移动机器人协同作业时进行统一规划和调度,高效的配合完成较复杂的任务。本发明提出了基于5g云化的全地形移动机器人控制器及其调度系统。
7.本发明所要解决的技术问题采用以下技术方案来实现:
8.基于5g云化的全地形移动机器人控制器,包括:
9.全地形移动机器人,包括四个车轮、设置在全地形移动机器人上的gps定位传感器、激光雷达传感器、双目视觉传感器、陀螺仪传感器、磁导航传感器、操作平台;
10.移动机器人控制器,设置在全地形移动机器人上,用于对读取到的传感器信息进行处理,并通过can通信方式同时对四个车轮进行控制;
11.5g通信处理控制器,设置在全地形移动机器人上,与移动机器人控制器采用tcp网
络通信方式交换信息,用于将全地形移动机器人与5g云调度系统进行通信处理,解析5g云调度系统的命令,对全地形移动机器人的实时状态信息进行处理后反馈到5g云调度系统中。
12.优选地,所述操作平台包括急停按钮、设备启动按钮、12v/24v电源航插接口、调试接口、人机界面、充电接口、备用接口、遥控启动按钮、总电源开关、总电源断路器、总电源接触器、稳压电源;
13.移动机器人控制器通过tcp网络通信方式与激光雷达传感器、双目视觉传感器连接,通过rs485串口通信方式与gps定位传感器、磁导航传感器、陀螺仪传感器连接。
14.优选地,全地形移动机器人在室内使用时通过激光雷达传感器、双目视觉传感器或磁导航传感器在室内进行导航;在室外使用时通过gps定位传感器、陀螺仪传感器在室外进行导航。
15.优选地,还包括一种抑制转动过程中“跳动”的控制策略,具体步骤如下:
16.(一)用拉格朗日方程动力学建模;
[0017][0018]
其中m(q)为惯性矩阵,为阻尼矩阵,为摩擦力矩阵,g(q)为重力矩阵b(q)为力矩转换矩阵,a
t
(q)为与约束有关的矩阵,λ为地面摩擦力向量;
[0019]
(二)仿真分析获得系统各项参数;
[0020]
(三)建立车轮的duggoff摩擦力模型;
[0021][0022][0023]
滑移率为:
[0024]
摩擦角为:
[0025]
车轮支持力为:
[0026]
其中,c
xi
和c
yi
分别为车轮的纵向和侧向刚度系数,si为判断因子,判断摩擦力是否在范围内;
[0027]
(四)基于速度差分的pid控制,对车轮进行速度分配;
[0028]
pid控制器的传递函数为:
[0029]
其中,tr是复归时间,td是微分时间;
[0030]
车轮的动力学传递函数为:
[0031]
则单个车轮的控制闭环传递函数为:
[0032]
应用基于5g云化的全地形移动机器人控制器的调度系统,包括全地形移动机器人、移动机器人控制器、5g通信处理控制器,还包括:
[0033]
上位机,用于完成相关调度任务分配、工作任务分析、数据统计处理、全地形移动机器人导航状态显示;
[0034]
5g基站,用于接收全地形移动机器人实时反馈的状态数据;
[0035]
5g网关,用于连接上位机与5g基站。
[0036]
本发明的有益效果是:
[0037]
本发明具有通信速度高、信号稳定等特点,通过三种导航方式,全地形移动机器人可以实现室内与室外导航控制,适应性更强;为了解决全地形移动机器人移动时,因外界因素造成车轮力矩分配不平衡,本发明提出一种控制策略,有效解决了车轮力矩分配不平衡造成的“跳动”的问题。
附图说明
[0038]
下面结合附图和实施例对本发明进一步说明:
[0039]
图1为本发明中全地形移动机器人的结构示意图;
[0040]
图2为本发明中全地形移动机器人的俯视结构示意图一;
[0041]
图3为本发明中全地形移动机器人的内部结构示意图;
[0042]
图4为本发明中全地形移动机器人的俯视结构示意图二;
[0043]
图5为本发明中全地形移动机器人的控制流程图;
[0044]
图6为本发明中全地形移动机器人四轮力矩分配控制流程图;
[0045]
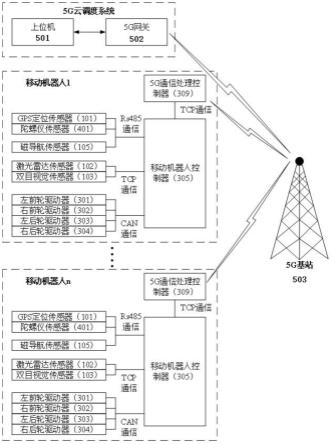
图7为本发明中调度系统的结构示意图。
[0046]
图中:101、gps定位传感器;102、激光雷达传感器;103、双目视觉传感器;104、大灯;105、磁导航传感器;106、5g通信天线;201、左前轮;202、左后轮;203、右前轮;204、急停按钮;205、设备启动按钮;206、12v/24v电源航插接口;207、5v电源航插接口;208、调试接口;209、人机界面;210、充电接口;211、备用接口;212、遥控启动按钮;213、总电源开关;214、右后轮;301、左前轮驱动器;302、右前轮驱动器;303、左后轮驱动器;304、右后轮驱动器;305、移动机器人控制器;306、总电源断路器;307、总电源接触器;308、稳压电源;309、5g通信处理控制器;401、陀螺仪传感器;501、上位机;502、5g网关;503、5g基站。
具体实施方式
[0047]
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图以及实施例对本发明进一步阐述。
[0048]
如图1至图6所示,基于5g云化的全地形移动机器人控制器,包括全地形移动机器人、设置在全地形移动机器人内部的移动机器人控制器305及5g通信处理控制器309。
[0049]
具体的,如图1和图4所示,所述全地形移动机器人的车体上端的支撑杆上安装有gps定位传感器101和激光雷达传感器102;所述全地形移动机器人的车体前部上侧安装有双目视觉传感器103,车体前部还安装有两个大灯104,以方便夜晚或外界光线较暗时,照明
使用;所述全地形移动机器人的车体前部下侧安装有磁导航传感器105;所述全地形移动机器人的车体后部上侧安装有5g通信天线106,以增强信号;所述全地形移动机器人的车体底部前侧设有陀螺仪传感器401。
[0050]
如图2所示,具体的,所述全地形移动机器人的四周处对应设有四个车轮,分别为左前轮201、右前轮203、左后轮202、右后轮214;所述全地形移动机器人的车体右侧设有操作平台,所述操作平台包括有急停按钮204,用于实现全地形移动机器人的紧急停止功能;设备启动按钮205,用于实现全地形移动机器人的设备启动功能;12v/24v电源航插接口206、5v电源航插接口207,用于在全地形移动机器人上扩展其它设备时,提供电源;调试接口208,用于给全地形移动机器人下载程序或者修改参数时使用;人机界面209,其功能主要用于全地形移动机器人的当前设备状态监控,功能选择,参数的读写等功能,是操作人员与全地形移动机器人的主要操作接口;充电接口210,用于全地形移动机器人的手动充电;备用接口211,用于方便以后扩展其它功能使用;遥控启动按钮212,用于全地形移动机器人的遥控模式启动功能;总电源开关213,用于全地形移动机器人的电源启动功能。
[0051]
如图3所示,具体的,所述全地形移动机器人的内部安装有与左前轮201连接的左前轮驱动器301、与右前轮203连接的右前轮驱动器302、与左后轮202连接的左后轮驱动器303、与右后轮214连接的右后轮驱动器304、以及总电源断路器306、总电源接触器307、稳压电源308等控制元器件。所述总电源断路器306用于全地形移动机器人的电路保护,当设备发生短路或者过载时,及时跳闸保护;所述总电源接触器307用于连接电池和全地形移动机器人的内部电路,当总电源接触器307吸合时,全地形移动机器人上电,反之断电;所述稳压电源308用于将电池输入的dc60v锂电池电源转换成dc24v、dc12v、dc5v三路稳压直流电源,给全地形移动机器人的传感器,控制器等供电。
[0052]
如图5和图7所示,所述gps定位传感器101、陀螺仪传感器401、磁导航传感器105通过rs485串口通信方式与移动机器人控制器305连接,并将采集到的环境信息发送到移动机器人控制器305上;所述激光雷达传感器102、双目视觉传感器103通过tcp网络通信方式与移动机器人控制器305连接,并将采集到的环境信息发送到移动机器人控制器305上;所述移动机器人控制器305与5g通信处理控制器309之间采用tcp网络通信方式交换信息;所述移动机器人控制器305通过can通信方式同时控制左前轮驱动器301、右前轮驱动器302、左后轮驱动器303、右后轮驱动器304,完成对全地形移动机器人的速度控制。
[0053]
如图6所示,具体的,所述全地形移动机器人在转向过程中,例如当左前轮201在运动过程中出现打滑现象,右后轮214为了保持和左前轮201一样的速度,所述移动机器人控制器305使得右后轮214的输入电流增大,而此时左前轮201的扭矩是减小的,右后轮214的力矩增大,与地面的作用力发生了改变,于是左前轮201和右后轮214出现“打架”现象,全地形移动机器人此时会发生“跳动”现象。为了克服以上问题,专利提出了一种控制策略。具体步骤如下:
[0054]
(一)用拉格朗日方程动力学建模;
[0055]
(二)仿真分析获得系统各项参数;
[0056]
(三)建立车轮的duggoff摩擦力模型;
[0057]
(四)基于速度差分的pid控制,对车轮进行速度分配。
[0058]
其中,步骤(一)中建立拉格朗日方程动力学建模为:
[0059][0060]
其中m(q)为惯性矩阵,为阻尼矩阵,为摩擦力矩阵,g(q)为重力矩阵b(q)为力矩转换矩阵,a
t
(q)为与约束有关的矩阵,λ为地面摩擦力向量。
[0061]
步骤(二)中根据实测值仿真分析获得全地形移动机器人的系统参数为:
[0062][0063][0064]
步骤(三)中建立车轮的dugoff摩擦力模型分析:
[0065][0066][0067]
滑移率为:
[0068]
摩擦角为:
[0069]
车轮支持力为:
[0070]
其中,c
xi
和c
yi
分别为车轮的纵向和侧向刚度系数,si为判断因子,判断摩擦力是否
在范围内。
[0071]
步骤(四)中pid控制器的传递函数为:
[0072]
其中,tr是复归时间,td是微分时间;
[0073]
车轮的动力学传递函数为:
[0074]
则单个车轮的控制闭环传递函数为:
[0075]
通过matlab仿真,跳接控制器参数,是k
p
=4.8,ki=5.6,发现在移动过程中,速度和电压均存在较大波动,因此将原先移动机器人控制器305分别对每一个车轮进行控制的方法修改为同侧轮及左前轮201和左后轮202统一控制,右前轮203和右后轮214统一控制,这样避免了控制过程中只考虑速度不考虑约束力的问题,此时车轮的力矩分配关系为:τ
zq
=τ
zh
=τ
l
,τ
yq
=τ
yh
=τr,这样车体在转弯或者回转过程中,速度及电流波动明显减小,则有效解决了力矩分配的问题,移植车体的“跳动”现象。
[0076]
如图7所示。基于5g云化的全地形移动机器人控制器的调度系统,在包括控制器的基础上,还包括有上位机501、5g网关502、5g基站503。在多台移动机器人进行复杂作业时,上位机501通过5g基站503将调度命令发送给所有全地形移动机器人,并通过5g基站503接收各台全地形移动机器人实时反馈的状态数据。所述上位机501是一台独立工业计算机,可以独立完成多台全地形移动机器人的任务分配、导航路径分配,工作模式设定等功能,并能根据全地形移动机器人经过5g基站503反馈给5g云调度系统实时状态,为全地形移动机器人提供实时路径更新,并能根据所有网内的全地形移动机器人的工作状态及位置信息实时优化每一台全地形移动机器人的路径和任务。
[0077]
如图7所示,具体的,所述移动机器人控制器305用于对全地形移动机器人进行控制,对读取到的传感器信息进行处理,对四个车轮驱动器进行运动控制等单台车的控制。所述5g通信处理控制器309用于全地形移动机器人与上位机501进行通信处理,解析上位机501的命令,对全地形移动机器人的实时状态信息经过处理后反馈给上位机501。
[0078]
进一步地,所述全地形移动机器人可以满足室外和室内不同工况的导航及任务。
[0079]
当处于室内工作状态时,全地形移动机器人有两种导航方式可以选择,当5g云调度系统指定全地形移动机器人以激光寻迹加双目视觉导航时,全地形移动机器人使用激光雷达传感器102和双目视觉传感器103两套传感器进行定位和导航,全地形移动机器人将激光雷达传感器102和双目视觉传感器103感知到的环境信息发送给5g云调度系统的上位机501,5g云调度系统根据反馈数据,根据存储的电子地图信息比对后,获取全地形移动机器人的实时位置信息、速度信息和角度信息,并回传给指定全地形移动机器人,全地形移动机器人根据上述位置信息、速度信息和角度信息并结合5g云调度系统发送的任务指令进行作业;当5g云调度系统指定全地形移动机器人以磁导航导航寻迹时,全地形移动机器人使用磁导航传感器105进行导航,并将导航中的路径信息实时发送给5g云调度系统的上位机501,5g云调度系统的上位机501向全地形移动机器人发送工作任务。
[0080]
当处于室外工作状态时,全地形移动机器人使用gps定位传感器101和陀螺仪传感器401两套传感器进行定位和导航,全地形移动机器人将gps定位传感器101和陀螺仪传感
器401感知到的环境信息发送给5g云调度系统的上位机501调度系统根据反馈数据,根据存储的电子地图信息比对后,获取全地形移动机器人的实时位置信息、速度信息和角度信息,并回传给指定全地形移动机器人,全地形移动机器人根据上述位置信息、速度信息和角度信息并结合5g云调度系统发送的任务指令进行作业。
[0081]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1