一种轮履腿机器人模糊自适应平衡控制算法
一种轮履腿机器人模糊自适应平衡控制算法
【技术领域】
1.本发明涉及一种轮履腿机器人模糊自适应平衡控制算法,属于机器人自动化控制领域。
背景技术:
2.随着机器人技术的不断进步,人类探索未知环境的活动越发频繁,大量专业机器人在遮蔽空间、水下、太空等环境下的探索活动中,降低人类直接受到生命安全威胁的危险。未知环境通常具有高度非结构化的特点,对于传统轮式、履式、足式机器人来说,其单一模式难以满足日渐复杂的任务需求,因此复合式机器人是目前机器人领域的研究热点,其中轮履腿机器人综合传统轮式、履式、足式机器人的优势成为主要研究对象。
3.轮履腿机器人自平衡是轮履腿机器人在复杂路面场景下运行时,动态调整机器人自身腿部结构来达到稳定状态。现有的关于机器人自平衡的研究中,大多针对独轮式、双轮式、足式机器人,难以应用于复合式机器人;而少量关于复合式机器人的自平衡方法难以通用,因此开展轮履腿机器人的自适应平衡控制具有重要的理论研究价值。
技术实现要素:
4.有鉴于此,本发明实施例提供了一种轮履腿机器人模糊自适应平衡控制算法,以实现轮履腿机器人在复杂路面场景下运行的自主平衡。
5.本发明实施例提供了一种轮履腿机器人模糊自适应平衡控制算法,包括:
6.依据轮履腿机器人三维模型,结合轮履腿机器人车体、外轮、摆臂之间的连接方位关系,建立车体中心坐标系和外轮、摆臂与车体间连接处坐标系;
7.依据车体中心坐标系和连接处坐标系,获得外轮、摆臂与车体间连接处坐标系在车体中心坐标系下的齐次变换矩阵;
8.依据轮履腿机器人车体、外轮、摆臂各部分质心在车体中心坐标系下的坐标,获得轮履腿机器人整体质心坐标;
9.依据轮履腿机器人外轮、摆臂上的履带与地面之间的接触关系,结合轮履腿机器人整体质心分布,建立轮履腿机器人投影稳定锥模型;
10.依据轮履腿机器人投影稳定锥模型,构建稳定性评价指标,获得表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度;
11.依据表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度,结合轮履腿机器人当前姿态作为模糊输入,以各摆臂关节目标角度作为模糊输出,构建模糊输入与模糊输出之间的模糊规则,构建模糊控制器。
12.上述方法中,所述依据轮履腿机器人车体、外轮、摆臂各部分质心在车体中心坐标系下的坐标,获得机器人整体质心坐标,包括:
13.车体中心坐标系{c0}及外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
)建立规则为:
14.车体中心坐标系{c0},坐标系原点固定于车体几何中心处;z轴垂直于车体平面方向向上;x轴与车体主传动轴相垂直,且方向选取第三象限方向为正方向;y轴按右手定则确定,y=z
×
x;
15.外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
),坐标系固定于连接处几何中心处;z轴垂直于车体平面方向向上;x轴与连接处传动轴方向相垂直,且方向选取第三象限方向为正方向;y轴按右手定则确定,y=z
×
x;
16.轮履腿机器人中车体与外轮、摆臂总连接个数为n
con
;
17.连接处坐标系相对于车体中心坐标系的齐次变换矩阵
[0018][0019]
其中,表示外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
)相对于车体中心坐标系{c0}的旋转变换矩阵,表示外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
)相对于车体中心坐标系{c0}的平移变换矩阵,矩阵中的参数,均通过轮履腿机器人的三维模型参数读取获得;
[0020]
车体中心坐标系{c0}中轮履腿机器人整体质心坐标(xg,yg,zg):
[0021][0022]
其中,mi(i=0,1,...,n
con
)表示轮履腿机器人中车体、外轮、摆臂各部分质量,(xi,yi,zi)(i=0,1,...,n
con
)表示车体中心坐标系{c0}中轮履腿机器人中车体、外轮、摆臂各部分质心的坐标。
[0023]
上述方法中,所述依据轮履腿机器人外轮、摆臂上的履带与地面之间的接触关系,结合轮履腿机器人整体质心分布,建立轮履腿机器人投影稳定锥模型,包括:
[0024]
轮履腿机器人投影稳定锥关键点选取规则为:
[0025]
以轮履腿机器人整体质心为稳定锥顶点g,以外轮和摆臂与地面接触点作为稳定锥的待选底面角点,以履带与地面接触的上边界的上边线的端点作为稳定锥的待选底面角点;
[0026]
轮履腿机器人投影稳定锥底面构建规则为:
[0027]
将车体中心坐标系{c0}中各待选底面角点按照其坐标的z轴方向上的分量排序,以分量最大的待选底面角点为基准,结合车体中心坐标系{c0}的z轴建立轮履腿机器人投影稳定锥底面,同时将其余待选底面角点投影到该底面,以该投影点作为轮履腿机器人投影稳定锥底面角点pi(i=1,2,...,n);
[0028]
轮履腿机器人投影稳定锥底面角点个数为n。
[0029]
上述方法中,所述依据轮履腿机器人投影稳定锥模型,构建稳定性评价指标,获得表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度,包括:
[0030]
设轮履腿机器人投影稳定锥底面边线为:
[0031][0032]
过轮履腿机器人投影稳定锥顶点g与底面边线相垂直的直线可以表示为:
[0033][0034]
其中,均为单位向量;
[0035]
由轮履腿机器人投影稳定锥底面边线的垂线和重心向量得到边线倾翻稳定角:
[0036][0037]
其中,为重心单位向量,σi表示方向,且
[0038]
由轮履腿机器人投影稳定锥底面边线的垂线和边线倾翻稳定角得到边线倾翻距离:
[0039]di
=||li||σ
i cosγi[0040]
构建稳定性评价指标规则如下:
[0041]
以d
p
=min{γi}(i=1,2,...,n)表征轮履腿机器人俯仰方向下的稳定裕度,以dr=min{di}(i=1,2,...,n)表征轮履腿机器人横滚方向下的稳定裕度。
[0042]
上述方法中,所述依据表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度,结合轮履腿机器人当前姿态作为模糊输入,以各摆臂关节目标角度作为模糊输出,构建模糊输入与模糊输出之间的模糊规则,构建模糊控制器,包括:
[0043]
将轮履腿机器人俯仰方向下的稳定裕度d
p
=min{γi}(i=1,2,...,n)和轮履腿机器人横滚方向下的稳定裕度dr=min{di}(i=1,2,...,n)按照隶属度函数分别划分为七个模糊等级,并用集合{nb,nm,ns,zo,ps,pm,pb}表示,字符分别表示负大、负中、负小、零、正小、正中、正大;
[0044]
由轮履腿机器人实际俯仰角和横滚角得到表示当前姿态的识别值p,如表1所示:
[0045]
表1无人车姿态识别分类
[0046][0047]
其中,α
in
表示俯仰角实际值,α
lim
表示俯仰角限位值,β
in
表示横滚角实际值,β
lim
表示横滚角限位值;
[0048]
以各摆臂关节目标角度θi(i=1,2,...,n
l
)为模糊输出值,模糊集为{nb,ns,zo,
ps,pb},字符分别表示负大、负小、零、正小、正大,;
[0049]
其中,输入输出隶属度函数均为高斯函数;
[0050]
构建模糊输入量与输出量之间的模糊规则:
[0051]
if(d
p is nb,andd
r is nb,and p is 1)then(θ1is ps,andθ2is nb,andθ3is pb,andθ4is ps);
[0052]
模糊控制器的解模糊处理采用中心加权平均解模糊器:
[0053][0054]
其中,为θi的隶属度函数,为模糊推理结果。
[0055]
由以上技术方案可以看出,本发明实施例具有以下有益效果:
[0056]
本发明实施例的技术方案中,依据轮履腿机器人三维模型,结合轮履腿机器人车体、外轮、摆臂之间的连接方位关系,建立车体中心坐标系和外轮、摆臂与车体间连接处坐标系;依据车体中心坐标系和连接处坐标系,获得外轮、摆臂与车体间连接处坐标系在车体中心坐标系下的齐次变换矩阵;依据轮履腿机器人车体、外轮、摆臂各部分质心在车体中心坐标系下的坐标,获得轮履腿机器人整体质心坐标;依据轮履腿机器人外轮、摆臂上的履带与地面之间的接触关系,结合轮履腿机器人整体质心分布,建立轮履腿机器人投影稳定锥模型;依据轮履腿机器人投影稳定锥模型,构建稳定性评价指标,获得表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度;依据表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度,结合轮履腿机器人当前姿态作为模糊输入,以各摆臂关节目标角度作为模糊输出,构建模糊输入与模糊输出之间的模糊规则,构建模糊控制器,因此可实现轮履腿机器人在具有倾翻危险情况下的快速自主平衡恢复,提高了轮履腿机器人对环境的适应能力,保证轮履腿机器人复杂路面场景下的稳定运行。
【附图说明】
[0057]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单的介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性和劳动性的前提下,还可以根据这些附图获得其它附图。
[0058]
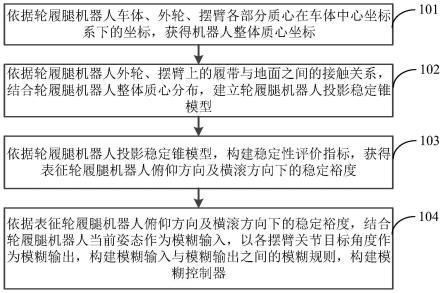
图1是本发明实施例所提供的轮履腿机器人模糊自适应平衡控制算法的流程示意图;
[0059]
图2是本发明实施例所提供的轮履腿机器人三维模型示意图;
[0060]
图3是本发明实施例所提供的轮履腿机器人投影稳定锥示意图;
[0061]
图4是本发明实施例所提供的轮履腿机器人发生侧向倾斜后的自平衡过程中各摆臂角度仿真曲线图;
[0062]
图5是本发明实施例所提供的轮履腿机器人发生侧向倾斜后的自平衡过程中车体俯仰角和横滚角仿真曲线图。
【具体实施方式】
[0063]
为了更好的理解本发明的技术方案,下面结合附图对本发明实施例进行详细描述。
[0064]
应当明确,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0065]
本发明实施例给出一种轮履腿机器人模糊自适应平衡控制算法,请参考图1,其为本发明实施例所提供的轮履腿机器人模糊自适应平衡控制算法的流程示意图,如图1所示,该方法包括以下步骤:
[0066]
步骤101,依据轮履腿机器人车体、外轮、摆臂各部分质心在车体中心坐标系下的坐标,获得机器人整体质心坐标。
[0067]
轮履腿机器人车体中心坐标系{c0}及外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
)建立规则为:
[0068]
车体中心坐标系{c0},坐标系原点固定于车体几何中心处;z轴垂直于车体平面方向向上;x轴与车体主传动轴相垂直,且方向选取第三象限方向为正方向;y轴按右手定则确定,y=z
×
x;
[0069]
外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
),坐标系固定于连接处几何中心处;z轴垂直于车体平面方向向上;x轴与连接处传动轴方向相垂直,且方向选取第三象限方向为正方向;y轴按右手定则确定,y=z
×
x;
[0070]
轮履腿机器人中车体与外轮、摆臂总连接个数为n
con
;
[0071]
轮履腿机器人车体中心及外轮、摆臂与车体间连接处坐标系建立结果如图2所示;
[0072]
连接处坐标系相对于车体中心坐标系的齐次变换矩阵
[0073][0074]
其中,表示外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
)相对于车体中心坐标系{c0}的旋转变换矩阵,表示外轮、摆臂与车体间连接处坐标系{ci}(i=1,2,...,n
con
)相对于车体中心坐标系{c0}的平移变换矩阵,矩阵中的参数,均通过轮履腿机器人的三维模型参数读取获得;
[0075]
车体中心坐标系{c0}中轮履腿机器人整体质心坐标(xg,yg,zg):
[0076][0077]
其中,mi(i=0,1,...,n
con
)表示轮履腿机器人中车体、外轮、摆臂各部分质量,(xi,
yi,zi)(i=0,1,...,n
con
)表示车体中心坐标系{c0}中轮履腿机器人中车体、外轮、摆臂各部分质心的坐标;
[0078]
假设轮履腿机器人车体质心即为几何中心,左右摆臂角度相同,按照图2所示轮履腿机器人三维模型示意图,获得轮履腿机器人整体质心坐标结果为:
[0079][0080]
其中,为前摆臂角度,η为后摆臂角度;
[0081]
至此,可得到车体中心坐标系下的机器人整体质心坐标。
[0082]
步骤102,依据轮履腿机器人外轮、摆臂上的履带与地面之间的接触关系,结合轮履腿机器人整体质心分布,建立轮履腿机器人投影稳定锥模型。
[0083]
轮履腿机器人投影稳定锥关键点选取规则为:
[0084]
以轮履腿机器人整体质心为稳定锥顶点g,以外轮和摆臂与地面接触点作为稳定锥的待选底面角点,以履带与地面接触的上边界的上边线的端点作为稳定锥的待选底面角点;
[0085]
轮履腿机器人投影稳定锥底面构建规则为:
[0086]
将车体中心坐标系{c0}中各待选底面角点按照其坐标的z轴方向上的分量排序,以分量最大的待选底面角点为基准,结合车体中心坐标系{c0}的z轴建立轮履腿机器人投影稳定锥底面,同时将其余待选底面角点投影到该底面,以该投影点作为轮履腿机器人投影稳定锥底面角点pi(i=1,2,...,4);
[0087]
轮履腿机器人投影稳定锥建立结果如图3所示;
[0088]
至此,完成了轮履腿机器人投影稳定锥模型的建立。
[0089]
步骤103,依据轮履腿机器人投影稳定锥模型,构建稳定性评价指标,获得表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度。
[0090]
具体的,设轮履腿机器人投影稳定锥底面边线为:
[0091][0092]
过轮履腿机器人投影稳定锥顶点g与底面边线相垂直的直线可以表示为:
[0093][0094]
其中,均为单位向量;
[0095]
由轮履腿机器人投影稳定锥底面边线的垂线和重心向量得到边线倾翻稳定角:
[0096]
[0097]
其中,为重心单位向量,σi表示方向,且
[0098]
由轮履腿机器人投影稳定锥底面边线的垂线和边线倾翻稳定角得到边线倾翻距离:
[0099]di
=||li||σicosγi[0100]
构建稳定性评价指标规则如下:
[0101]
以d
p
=min{γi}(i=1,2,...,4)表征轮履腿机器人俯仰方向下的稳定裕度,以dr=min{di}(i=1,2,...,4)表征轮履腿机器人横滚方向下的稳定裕度;
[0102]
按照图3所示的轮履腿机器人投影稳定锥示意图,可得轮履腿机器人投影稳定锥底面角点个数n=4,轮履腿机器人俯仰方向下的稳定裕度d
p
=min{γ1,γ2,γ3,γ4},轮履腿机器人横滚方向下的稳定裕度dr=min{d1,d2,d3,d4}。
[0103]
步骤104,依据表征轮履腿机器人俯仰方向及横滚方向下的稳定裕度,结合轮履腿机器人当前姿态作为模糊输入,以各摆臂关节目标角度作为模糊输出,构建模糊输入与模糊输出之间的模糊规则,构建模糊控制器。
[0104]
具体的,将轮履腿机器人俯仰方向下的稳定裕度d
p
=min{γi}(i=1,2,...,n)和轮履腿机器人横滚方向下的稳定裕度dr=min{di}(i=1,2,...,n)按照隶属度函数分别划分为七个模糊等级,并用集合{nb,nm,ns,zo,ps,pm,pb}表示,字符分别表示负大、负中、负小、零、正小、正中、正大;
[0105]
由轮履腿机器人实际俯仰角和横滚角得到表示当前姿态的识别值p,如表2所示:
[0106]
表2无人车姿态识别分类
[0107][0108]
其中,α
in
表示俯仰角实际值,α
lim
表示俯仰角限位值,β
in
表示横滚角实际值,β
lim
表示横滚角限位值;
[0109]
以各摆臂关节目标角度θi(i=1,2,...,n
l
)为模糊输出值,模糊集为{nb,ns,zo,ps,pb},字符分别表示负大、负小、零、正小、正大;
[0110]
其中,输入输出隶属度函数均为高斯函数;
[0111]
构建模糊输入量与输出量之间的模糊规则,如表3所示:
[0112]
表3模糊控制规则表
[0113][0114][0115]
其中,θ1表示轮履腿机器人右前方摆臂,θ2表示轮履腿机器人左前方摆臂,θ3表示轮履腿机器人右后方摆臂,θ4表示轮履腿机器人左后方摆臂。
[0116]
模糊控制器的解模糊处理采用中心加权平均解模糊器:
[0117][0118]
其中,为θi的隶属度函数,为模糊推理结果。
[0119]
假设轮履腿机器人在两侧高度差为15cm的台阶上发生侧向倾斜后,机器人通过调整各摆臂角度达到自平衡,各摆臂角度仿真曲线如图4所示,在此过程中车体俯仰角和横滚角仿真曲线图如图5所示,在0.8s内即可达到平衡状态。
[0120]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
[0121]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1