用于移动机器人的同步旋转控制系统及相应机器人和方法与流程
本发明涉及移动机器人领域,并且具体地,涉及用于移动机器人的同步旋转控制系统、用于移动机器人的同步旋转控制的方法、相应的移动机器人、计算机设备以及非暂时性计算机可读存储介质。
背景技术:
1、移动机器人具有在环境中四处移动的能力,并且不固定在某个物理位置。移动机器人可以是例如“自主”移动机器人(autonomous mobile robot,简称“amr”),这意味着它们可以在不受控制的环境中导航,而无需物理或机电引导设备。或者,例如,移动机器人也可以是依靠引导设备的自主引导车辆(automated guided vehicle,简称“agv”),该引导设备允许移动机器人在相对受控的空间中沿着预定的导航路线行驶。
2、移动机器人在商业和工业环境中已变得越来越普遍。特别是在物流仓储行业,越来越多地采用移动机器人以高效地运送货物。
3、在物流仓储应用场景下,移动机器人难免会遇到t型、l型等比较狭窄的工作空间。在此情况下,托运货物的移动机器人会面对转弯困难的问题。针对该问题,已经开发了带有同步旋转功能的移动机器人。这样的移动机器人在旋转过程中,移动机器人的可旋转托盘能够相对于移动机器人的底盘实时调节角度以实现底盘旋转而可旋转托盘相对于地面静止的效果。例如,cn 109308071a公开了一种带有升降旋转机构的搬运小车。该搬运小车在其顶升圆盘与顶升驱动装置之间设有同步旋转机构。该顶升圆盘在该同步旋转机构的同步旋转驱动下,使得料架相对于底面保持静止,提升直线行驶与旋转过程中料架的稳定性。
4、然而,目前,现有的移动机器人主要采用仅基于惯性测量单元(imu)的旋转角度计算方式或仅基于轮式里程计模块(odom)的旋转角度计算方式。单独使用上述任一种旋转角度计算方式都存在缺陷,这是因为惯性测量单元长时间运行可能产生累计误差,轮式里程计模块受环境影响而使测量数据不准确,例如,由于地面湿滑而移动机器人的差速轮发生打滑,这会使轮式里程计模块计算出的数据不准确。
5、因此,需要一种改进的用于移动机器人的同步旋转控制系统。
技术实现思路
1、本发明的目的在于解决或至少缓解现有技术的上述问题中的至少一些。
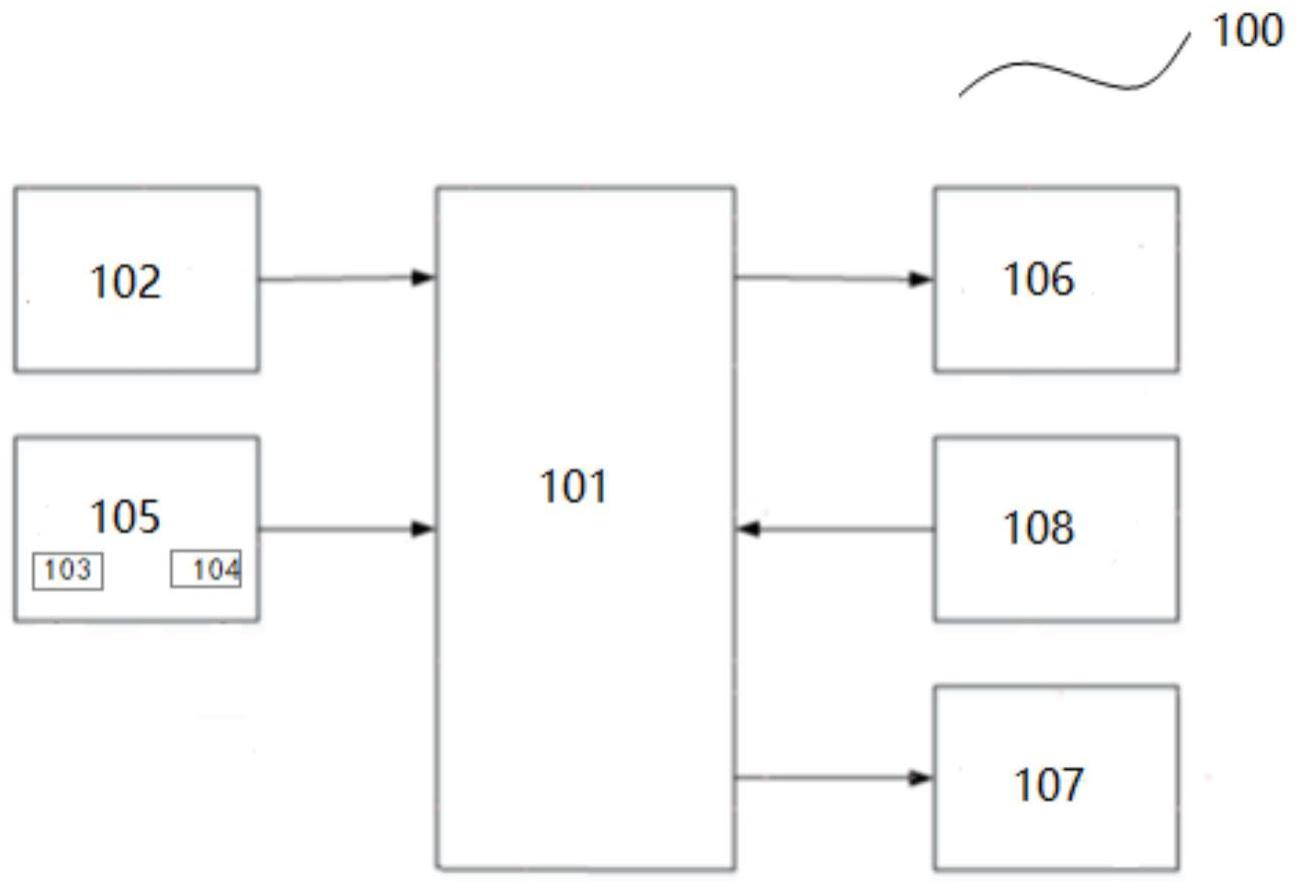
2、根据本发明的一方面,提供了一种用于移动机器人的同步旋转控制系统,所述移动机器人具有底盘和可旋转托盘,所述底盘安装有第一差速轮和第二差速轮,所述同步旋转控制系统包括控制器、惯性测量单元、轮式里程计模块和托盘同步旋转执行器;其中,
3、所述惯性测量单元被配置为实时测量所述移动机器人的底盘绕垂直于地面的竖向轴线旋转的第一角速度w1并且将所述第一角速度w1发送到所述控制器;
4、所述轮式里程计模块包括第一速度传感器和第二速度传感器,所述第一速度传感器和第二速度传感器被配置为分别实时测量所述移动机器人的底盘的第一差速轮的第一速度v1和第二差速轮的第二速度v2,所述轮式里程计模块被配置为能够根据所述第一速度v1和所述第二速度v2实时计算所述移动机器人的底盘绕所述竖向轴线旋转的第二角速度w2并且将所述第二角速度w2发送到所述控制器;以及
5、所述控制器被配置为与所述惯性测量单元、所述轮式里程计模块和所述托盘同步旋转执行器通信地连接,以至少基于所述底盘的所述第一角速度w1和所述底盘的第二角速度w2控制所述托盘同步旋转执行器,使得当所述移动机器人的底盘沿着一转动方向旋转一角度时,使所述托盘同步旋转执行器控制所述移动机器人的可旋转托盘同步地向所述转动方向的相反方向旋转相同角度。
6、根据本发明的第二方面,提供了一种移动机器人,包括:
7、根据本发明的第一方面所述的同步旋转控制系统;
8、底盘;
9、第一差速轮和第二差速轮,所述第一差速轮和所述第二差速轮被安装在所述底盘;
10、可旋转托盘,所述可旋转托盘通过所述托盘同步旋转执行器与所述底盘连接并且被配置为由所述托盘同步旋转执行器驱动旋转;以及
11、底盘驱动器,所述底盘驱动器被安装至所述底盘并且被配置为驱动所述第一差速轮和所述第二差速轮。
12、根据本发明的第三方面,提供了一种用于移动机器人的同步旋转控制的方法,其中所述移动机器人包括同步旋转控制系统、底盘和可旋转托盘,所述底盘安装有第一差速轮和第二差速轮,所述同步旋转控制系统包括控制器、惯性测量单元、轮式里程计模块和托盘同步旋转执行器,所述方法包括:
13、通过所述惯性测量单元实时测量所述移动机器人的底盘绕垂直于地面的竖向轴线旋转的第一角速度w1;
14、根据所述轮式里程计模块的第一速度传感器和第二速度传感器分别实时测量的所述第一差速轮的第一速度v1和所述第二差速轮的第二速度v2实时计算所述移动机器人的底盘绕所述竖向轴线旋转的第二角速度w2;以及
15、通过所述控制器至少基于所述第一角速度w1和第二角速度w2控制所述托盘同步旋转执行器,使得当所述移动机器人的底盘沿着一转动方向旋转一角度时,使所述托盘同步旋转执行器控制所述可旋转托盘同步地向所述转动方向的相反方向旋转相同角度。
16、根据本发明的第四方面,提供了一种计算机设备,包括存储器和处理器,所述存储器上存储有计算机指令,所述计算机指令在由所述处理器执行时导致根据本发明的第三方面所述的用于移动机器人的同步旋转控制的方法被执行。
17、根据本发明的第五方面,提供了一种非暂时性计算机可读存储介质,其上存储有计算机指令,所述计算机指令在由处理器执行时导致根据本发明的第三方面所述的用于移动机器人的同步旋转控制的方法被执行。
18、本发明的解决方案通过将基于惯性测量单元的旋转角度计算方式和基于轮式里程计模块的旋转角度计算方式融合,避免了单独使用上述任一种旋转角度计算方式存在的缺陷,即,避免了累计误差并且提高了控制精度。
技术特征:
1.一种用于移动机器人的同步旋转控制系统,所述移动机器人具有底盘和可旋转托盘,所述底盘安装有第一差速轮和第二差速轮,所述同步旋转控制系统包括控制器、惯性测量单元、轮式里程计模块和托盘同步旋转执行器;其中,
2.根据权利要求1所述的同步旋转控制系统,其中,所述控制器被进一步配置为:
3.根据权利要求1所述的同步旋转控制系统,其中,所述控制器被进一步配置为:
4.根据权利要求2或3所述的同步旋转控制系统,其中,所述控制器被进一步配置为:
5.根据权利要求1-3中任一项所述的同步旋转控制系统,其中,所述同步旋转控制系统还包括托盘角度传感器,所述托盘角度传感器被安装在所述移动机器人上并且被配置为与所述控制器通信地连接,测量所述移动机器人的可旋转托盘的旋转角度γ,并且将所述旋转角度γ传送到所述控制器。
6.根据权利要求5所述的同步旋转控制系统,其中,所述控制器被进一步配置为采用pid控制算法来控制所述托盘同步旋转执行器,其中在所述pid控制算法中使用所述旋转角度γ。
7.一种移动机器人,包括:
8.一种用于移动机器人的同步旋转控制的方法,其中所述移动机器人包括同步旋转控制系统、底盘和可旋转托盘,所述底盘安装有第一差速轮和第二差速轮,所述同步旋转控制系统包括控制器、惯性测量单元、轮式里程计模块和托盘同步旋转执行器,所述方法包括:
9.根据权利要求8所述的方法,其中,所述方法还包括:
10.根据权利要求8所述的方法,其中,所述方法还包括:
11.根据权利要求9或10所述的方法,其中,所述方法还包括:
12.根据权利要求8-10中任一项所述的方法,其中,所述方法还包括通过安装在所述移动机器人上的并且被配置为与所述控制器通信地连接的托盘角度传感器测量所述移动机器人的可旋转托盘的旋转角度γ。
13.根据权利要求12所述的方法,其中,所述控制器被进一步配置为采用pid控制算法来控制所述托盘同步旋转执行器,其中在所述pid控制算法中使用所述旋转角度γ。
14.一种计算机设备,包括存储器和处理器,所述存储器上存储有计算机指令,所述计算机指令在由所述处理器执行时导致根据权利要求8至13中任一项所述的用于移动机器人的同步旋转控制的方法被执行。
15.一种非暂时性计算机可读存储介质,其上存储有计算机指令,所述计算机指令在由处理器执行时导致根据权利要求8至13中任一项所述的用于移动机器人的同步旋转控制的方法被执行。
技术总结
一种用于移动机器人的同步旋转控制系统及相应方法、移动机器人、计算机设备以及存储介质。该系统包括控制器、惯性测量单元、轮式里程计模块和托盘同步旋转执行器;惯性测量单元被配置为实时测量移动机器人的底盘绕竖向轴线旋转的第一角速度W1;轮式里程计模块包括被配置为分别实时测量第一差速轮的第一速度V1和第二差速轮的第二速度V2的第一和第二速度传感器并且被配置为能够根据V1和V2实时计算底盘绕竖向轴线旋转的第二角速度W2并且发送该W2;控制器被配置为至少基于W1和W2控制托盘同步旋转执行器,使得当移动机器人的底盘沿着一转动方向旋转一角度时,使托盘同步旋转执行器控制移动机器人的可旋转托盘同步地向转动方向的相反方向旋转相同角度。
技术研发人员:赵胜旗,闫国旗
受保护的技术使用者:灵动科技(北京)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!