一种多智能体集群系统自适应固定时间仿射编队控制方法
本发明涉及多智能体集群系统编队控制,具体涉及一种多智能体集群系统自适应固定时间仿射编队控制方法。
背景技术:
1、多智能体集群系统是由多个智能体组成的一种复杂网络系统,这些智能体可以相互交互和协作,以完成某项任务或达成某个目标。在集群系统中,各个智能体之间可以通过通信进行信息传递和共享资源,从而实现分布式处理和决策。这些智能体可以是无人机、机器人、传感器等不同类型的设备,它们通过互相协作,在特定的环境中实现了高效的数据收集、处理和控制等任务。由于其具有高度的可扩展性、自适应性和鲁棒性,多智能体集群系统在日常生活中的应用越来越广泛,比如在无人驾驶汽车、航空飞行控制、医疗诊断和环境监测等方面都有着重要的应用。
2、在多智能体集群系统的控制任务中,编队控制一直是该领域研究中的热门,其中仿射编队控制问题又是近些年来较为新颖的问题,编队控制可以通过选择适当的通信网络拓扑实现系统的信息交互使得智能体的未知状态不断发生变化,从而形成实际需要的编队构型。除此之外,收敛速度也是编队控制算法中的一个重要评价指标。相较于不可预计稳定时间的控制算法,固定时间编队控制算法会更受欢迎,因为这种算法更符合实际应用的需求。固定时间编队控制算法也存在不足,如会面临拓扑结构下的全局信息不能够轻易获取的问题,如何克服这个不足,使得该类问题的控制器的设计变得值得推敲。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种多智能体集群系统自适应固定时间仿射编队控制方法,将仿射编队控制技术与自适应算法和固定时间算法结合,以解决现有技术中集群智能系统在编队过程中鲁棒性不足和可靠性难以保证的问题,从而提高多智能体集群系统的编队效率和鲁棒性,同时能够更加快速准确地对集群智能系统进行编队。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、一种多智能体集群系统自适应固定时间仿射编队控制方法,包括以下步骤:
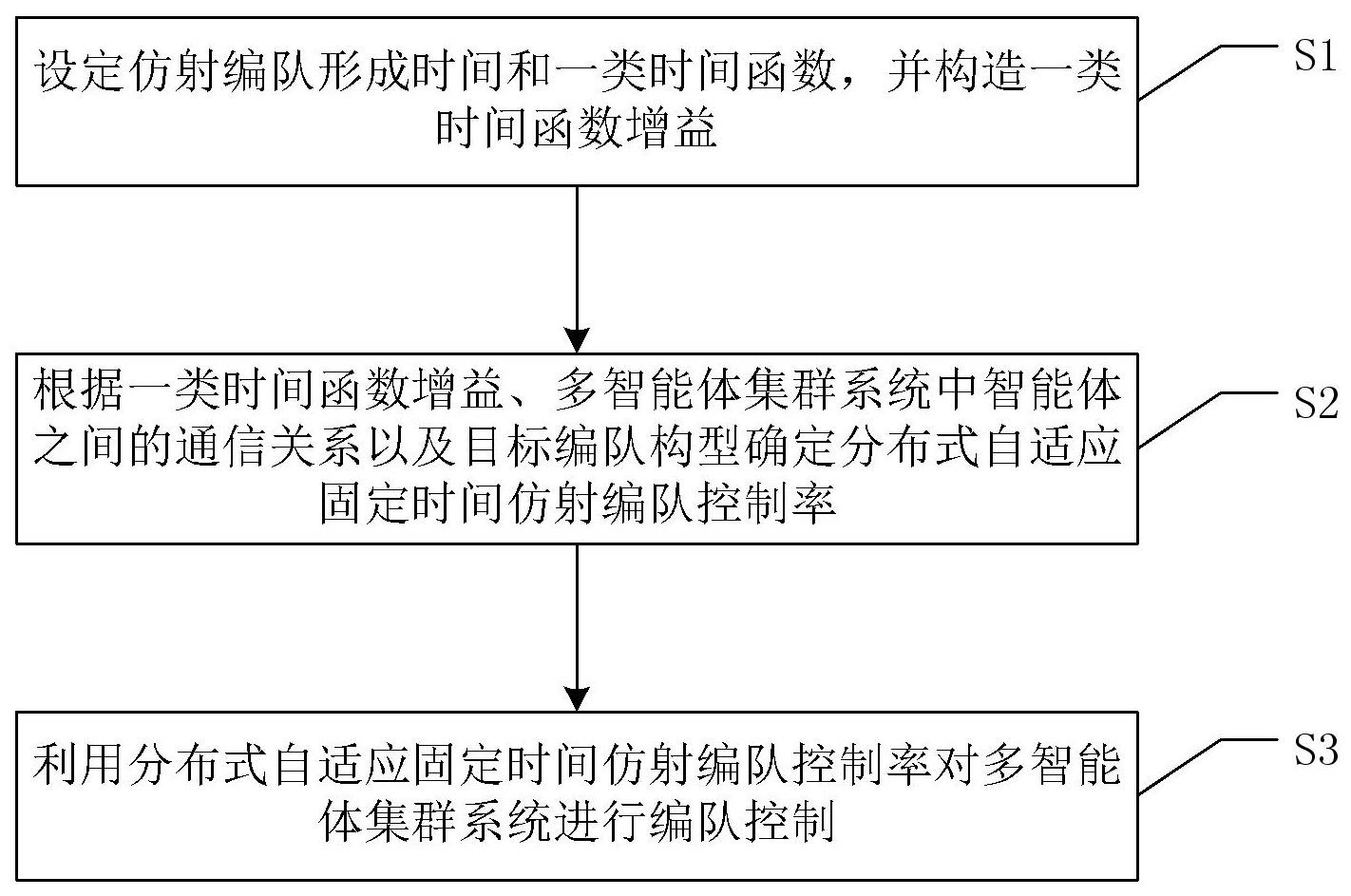
4、s1、设定仿射编队形成时间和一类时间函数,并构造一类时间函数增益;
5、s2、根据一类时间函数增益、多智能体集群系统中智能体之间的通信关系以及目标编队构型确定分布式自适应固定时间仿射编队控制率;
6、s3、利用分布式自适应固定时间仿射编队控制率对多智能体集群系统进行编队控制。
7、进一步地,步骤s1中设定的一类时间函数具体为:
8、
9、其中, t为时间, tf为根据不同的编队任务要求设定的仿射编队形成时间,为一类时间函数的初值,和分别为一类时间函数在 t时刻和 tf时刻的右导数。
10、进一步地,步骤s1中构造的一类时间函数增益具体为:
11、
12、其中,为一类时间函数增益,为常数。
13、进一步地,步骤s2具体包括:
14、根据一类时间函数增益、多智能体集群系统中智能体之间的通信关系以及目标编队构型确定leaderless系统的分布式自适应固定时间仿射编队控制率。
15、进一步地,所述leaderless系统的分布式自适应固定时间仿射编队控制率具体为:
16、
17、其中,为第 i个智能体的控制输入,为一类时间函数增益,为自适应控制增益,为多智能体集群系统中智能体的个数,为多智能体集群系统中第 i个智能体和第 j个智能体之间的通信权重,和分别为第 i个智能体和第 j个智能体的状态,为人为可设定参数,为自适应控制增益的变化率,为二范数的平方。
18、进一步地,步骤s2具体包括:
19、根据一类时间函数增益、多智能体集群系统中智能体之间的通信关系以及目标编队构型确定leader-follower系统的分布式自适应固定时间仿射编队控制率。
20、进一步地,所述leader-follower系统的分布式自适应固定时间仿射编队控制率具体为:
21、
22、其中,为第 i个智能体的控制输入,为一类时间函数增益,和均为自适应控制增益,为多智能体集群系统中智能体的个数,为多智能体集群系统中第 i个智能体和第 j个智能体之间的通信权重,和分别为第 i个智能体和第 j个智能体的状态,为设定参数,和分别为自适应控制增益和的变化率,为二范数,为二范数的平方, ni为第 i个智能体的邻居集,sgn为符号函数。
23、本发明具有以下有益效果:
24、本发明通过将仿射编队控制与自适应技术和固定时间技术相结合,解决了编队中的两大主要分支leaderless系统和leader-follower系统的仿射编队控制问题。相较传统的编队控制方法,本发明提高多智能体集群系统的编队效率和鲁棒性,同时能够更加快速准确地对集群智能系统进行编队,更有利于编队控制问题的解决。
技术特征:
1.一种多智能体集群系统自适应固定时间仿射编队控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种多智能体集群系统自适应固定时间仿射编队控制方法,其特征在于,步骤s1中设定的一类时间函数具体为:
3.根据权利要求2所述的一种多智能体集群系统自适应固定时间仿射编队控制方法,其特征在于,步骤s1中构造的一类时间函数增益具体为:
4.根据权利要求1所述的一种多智能体集群系统自适应固定时间仿射编队控制方法,其特征在于,步骤s2具体包括:
5.根据权利要求4所述的一种多智能体集群系统自适应固定时间仿射编队控制方法,其特征在于,所述leaderless系统的分布式自适应固定时间仿射编队控制率具体为:
6.根据权利要求1所述的一种多智能体集群系统自适应固定时间仿射编队控制方法,其特征在于,步骤s2具体包括:
7.根据权利要求6所述的一种多智能体集群系统自适应固定时间仿射编队控制方法,其特征在于,所述leader-follower系统的分布式自适应固定时间仿射编队控制率具体为:
技术总结
本发明公开了一种多智能体集群系统自适应固定时间仿射编队控制方法,涉及多智能体集群系统编队控制技术领域。该方法包括设定仿射编队形成时间和一类时间函数,并构造一类时间函数增益;根据一类时间函数增益、多智能体集群系统中智能体之间的通信关系以及目标编队构型确定分布式自适应固定时间仿射编队控制率;利用分布式自适应固定时间仿射编队控制率对多智能体集群系统进行编队控制。本发明能够提高多智能体集群系统的编队效率和鲁棒性,同时能够更加快速准确地对集群智能系统进行编队。
技术研发人员:赵宇,孙逸凡,刘永芳
受保护的技术使用者:西北工业大学深圳研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!