一种基于GA-PSO优化横向LQR控制器的方法及系统
本发明属于车辆控制,具体涉及一种基于ga-pso优化横向lqr控制器的方法及系统。
背景技术:
1、智能汽车是汽车电子信息化和智能化的产物,是近年来汽车科技革命和产业变革的战略性方向。其中轨迹跟踪功能是智能汽车的重要研究方向。
2、常见的轨迹跟踪控制算法有:滑模控制、基于几何学的纯追踪控制和stanley控制以及基于动力学的mpc和lqr控制等。上述控制算法中,lqr主要用于线性系统的控制,其可损耗较小代价将非平衡状态分量调整至平衡状态。lqr权重系数对系统控制效果影响极大,主流方法仍采用试错法对系数矩阵进行调参。
3、随着智能优化算法的发展,许多专家学者将其应用于权重系数的整调中,是目前的研究热点。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种基于ga-pso优化横向lqr控制器的方法及系统,用于解决线性二次型调节器(lqr)系数矩阵选取困难导致精度和效率低的技术问题。
2、本发明采用以下技术方案:
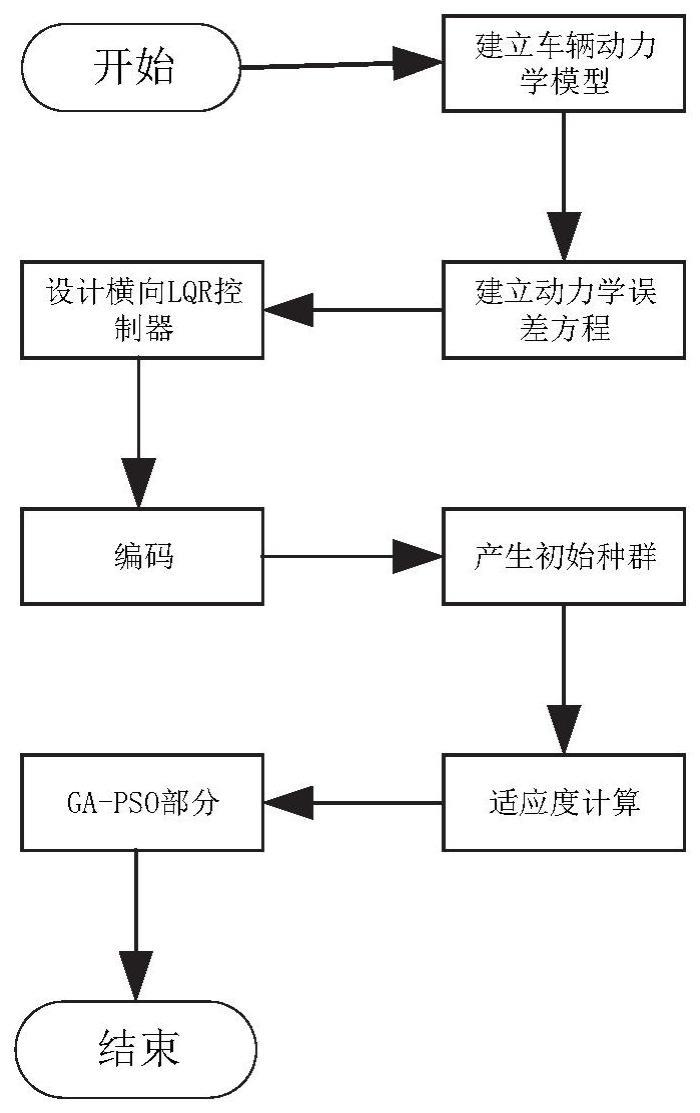
3、一种基于ga-pso优化横向lqr控制器的方法,基于二自由度车辆动力学模型设计横向lqr控制器;将横向lqr控制器的系数矩阵视作粒子,并对粒子进行编码,通过随机函数生成随机的初始化粒子种群;对轨迹跟踪过程中跟踪的每一个轨迹点k处对应lqr控制器的损失函数值进行累加,得到对应轨迹中q系数矩阵和r系数矩阵对于整条轨迹跟踪效果的影响程度,计算ga-pso的适应度函数值;应用遗传粒子混合算法将得到的初始化粒子种群按照适应度值进行排序,对前半部分进行粒子群算法优化,并把优化后的粒子群作为遗传算法中的染色体;对粒子群优化算法中的惯性权重w进行改进,将执行完操作的q系数矩阵和r系数矩阵合并生成ps/2个个体,再与粒子群优化算法生成的ps/2个个体组成完整的ps个个体的完整种群,当达到迭代次数时,输出最优的个体与适应度的数值以实现优化。
4、具体的,根据二自由度车辆动力学模型确定动力学横向误差方程,进而设计横向lqr控制器,车辆动力学模型具体为:
5、
6、其中,分别为前轮和后轮的轮胎侧偏刚度;vx、vy分别为车辆纵向、横向速度,m为整车质量,a为质心到前轴的距离,i为车辆绕z轴的转动惯量,为车辆加速度,为横摆角加速度,为车辆横向速度,为横摆角速度,δ为前轮转角。
7、进一步的,动力学横向误差方程具体为:
8、
9、其中,x为横向误差,为横向误差的导数,a,b,c分别为系数矩阵,u为前轮转角,为参考航向角的导数。
10、具体的,将横向lqr控制器的能量损失函数作为ga-pso的适应度函数,计算ga-pso的适应度函数值j为:
11、
12、其中,m为跟踪时的轨迹点数,x为横向误差,u为前轮转角。
13、具体的,对粒子进行编码具体为:
14、将每个粒子视作一个个体,个体中按照lqr的特点,分为q染色体和r染色体,q染色体为4*4的对角阵,即4个基因;r染色体为1*1的矩阵,即1个基因;种群中粒子的个数为30,每个个体中q染色体的基因取值范围为[0,50],r染色体的基因范围为[0,20]。
15、具体的,ga-pso的适应度函数值j为:
16、
17、其中,edk为跟踪到轨迹点k时与参考轨迹的横向误差,m为跟踪时的轨迹点数,x为横向误差,u为前轮转角。
18、具体的,惯性权重w为:
19、
20、其中,wmax和wmin分别代表最大和最小权值,i代表当前迭代次数,n代表算法的最大迭代次数。
21、具体的,在局部采用遗传算法进行优化时,对q执行选择、交叉、变异操作,对r执行变异操作,q矩阵为4*4的对角阵,r矩阵为1*1的矩阵,变异算子的变异概率pm为:
22、
23、其中,j为ga-pso的适应度函数值。
24、具体的,当未达到迭代次数时,继续操作生成新的子代。
25、第二方面,本发明实施例提供了一种基于ga-pso优化横向lqr控制器的系统,包括:
26、设计模块,基于二自由度车辆动力学模型设计横向lqr控制器;
27、粒子模块,将横向lqr控制器的系数矩阵视作粒子,并对粒子进行编码,通过随机函数生成随机的初始化粒子种群;
28、函数模块,对轨迹跟踪过程中跟踪的每一个轨迹点k处对应lqr控制器的损失函数值进行累加,得到对应轨迹中q系数矩阵和r系数矩阵对于整条轨迹跟踪效果的影响程度,计算ga-pso的适应度函数值j;
29、排序模块,应用遗传粒子混合算法将得到的初始化粒子种群按照得到的适应度值j进行排序,对前半部分进行粒子群算法优化,并把优化后的粒子群作为遗传算法中的染色体;
30、优化模块,对粒子群优化算法中的惯性权重w进行改进,将执行完操作的q系数矩阵和r系数矩阵合并生成ps/2个个体,再与粒子群优化算法生成的ps/2个个体组成完整的ps个个体的完整种群,当达到迭代次数时,输出最优的个体与适应度的数值以实现优化。
31、与现有技术相比,本发明至少具有以下有益效果:
32、一种基于ga-pso优化横向lqr控制器的方法,结合粒子群优化算法和遗传算法的优点,针对二自由度汽车动力学模型下lqr横向控制器的特点,建立了一种基于ga-pso的lqr横向控制优化算法;对比了ga-pso和粒子群优化(pso)算法的优化效果。carsim/simulink联合仿真结果表明,经ga-pso算法优化后的控制器跟踪精度和计算效率分别提高了47.06%和63.54%,且优化后的控制器具有较强的鲁棒性。
33、进一步的,由于车辆系统本身较为复杂,若对车辆的运动建立数字化模型,模型的建立越准确,对车辆运动的描述越准确,对车辆的跟踪控制的效果就越好。除了真实反映车辆特性外,建立的模型也应该尽可能的简单易用。车辆模型一般分为运动学和动力学模型。车辆运动学模型只适应于低速情况下,而车辆动力学模型考虑了高速下轮胎的特性,本发明采用二自由度的车辆动力学模型进行建模,既能精确的描述车辆模型,又能尽可能简单易用。
34、进一步的,以误差方程的方式,方便后面的控制器的控制,因为影响控制器本身的因素就是横向误差。
35、进一步的,优化算法的基本数据处理方法,只有先对数据进行编码设置了,后面才能进行粒子群、遗传算法的相应操作。
36、进一步的,以lqr的能量损失函数作为ga-pso优化时候的适应度函数。一方面,两者都是函数值越小表明效果越好;另一方面,ga-pso的优化目标就是优化lqr控制器,所以该适应度函数的设置应该符合lqr控制器的原理,最合适的选取方式就是直接以lqr控制器本身的能量损失函数作为ga-pso的适应度函数。
37、进一步的,车辆动力学误差方程矩阵的形式决定了,q和r矩阵的形式一定会是q矩阵为4*4的对角阵,r矩阵为1*1的矩阵。对q执行执行选择、交叉、变异操作是遗传算法的基本流程,但是r不行,因为r是1*1的矩阵,不能执行选择、交叉操作,并且只执行变异操作可以加大搜索范围,减少陷入局部最优解的现象发生。
38、可以理解的是,上述第二方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
39、综上所述,本发明在降低跟踪误差和减少计算负荷方面具有显著效果,且鲁棒性好。
40、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!