自动导向车的纠偏方法及系统与流程
本公开涉及自动运动控制,特别涉及一种自动导向车的纠偏方法及系统。
背景技术:
1、agv(automated guided vehicle,无人搬运车)以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。agv常应用于工业领域与物流领域中,需要拥有极高的导航精度和可靠性来满足工业领域与物流领域的要求。
2、在agv导航过程中,由于环境变化、传感器误差、机械系统不精确等原因,agv可能会偏离预定路径或目标位置,导致导航不准确。为了纠正这种偏差,需要采取相应的纠偏方法。然而传统的差速轮组导航系统和纠偏方法很难达到所需的导航精度,因此亟需研发一种自动导向车的纠偏方法及系统,来提高导航纠偏的精确度以及可靠性。
技术实现思路
1、鉴于上述问题,本公开提供一种自动导向车的纠偏方法及系统,来提高avg导航纠偏的精确度以及可靠性。
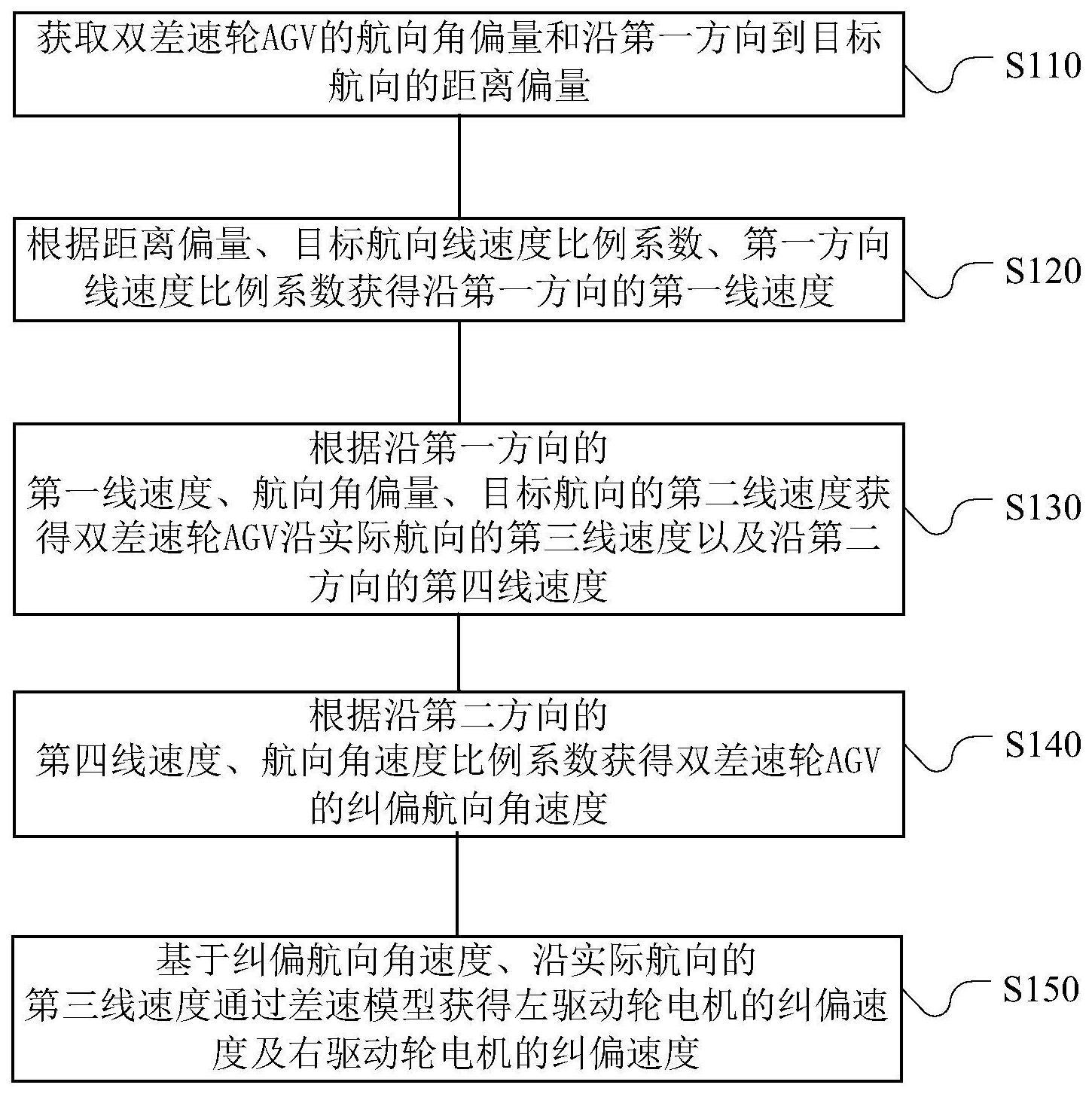
2、根据本公开的第一方面,提供一种自动导向车的纠偏方法,自动导向车包括位于车体中心处的相机传感器、以车体中心为基准的左驱动轮和右驱动轮,纠偏方法包括:
3、获取自动导向车的航向角偏量和沿第一方向到目标航向的距离偏量,其中,航向角偏量为目标航向与实际航向之间的夹角,第一方向为垂直于目标航向的方向;
4、根据所述距离偏量、目标航向线速度比例系数、第一方向线速度比例系数获得沿第一方向的第一线速度;
5、根据所述沿第一方向的第一线速度、航向角偏量、沿目标航向的第二线速度获得所述自动导向车沿实际航向的第三线速度、以及沿第二方向的第四线速度,其中,第二方向为垂直于实际航向的方向;
6、根据所述沿第二方向的第四线速度、航向角速度比例系数获得所述自动导向车的纠偏航向角速度;
7、基于所述纠偏航向角速度、所述沿实际航向的第三线速度通过差速模型获得左驱动轮电机的纠偏速度以及右驱动轮电机的纠偏速度,以控制所述自动导向车进行位置纠偏。
8、可选地,还包括:
9、通过调整所述第一方向线速度比例系数和/或所述航向角速度比例系数,调整所述自动导向车的纠偏幅度。
10、可选地,所述第一方向线速度比例系数和所述航向角速度比例系数为上位机调整的设定值。
11、可选地,根据所述距离偏量、目标航向线速度比例系数、第一方向线速度比例系数获得沿第一方向的第一线速度包括:
12、基于所述沿第一方向到目标航向的距离偏量、目标航向线速度比例系数、第一方向线速度比例系数的乘积获得所述沿第一方向的第一线速度,其中,所述目标航向线速度比例系数为所述沿目标航向的第二线速度与目标航向的最大目标线速度的比值的绝对值,所述沿目标航向的第二线速度为所述最大目标线速度通过速度规划算法获得。
13、可选地,所述速度规划算法包括s曲线速度规划算法。
14、可选地,根据所述沿第二方向的第四线速度、航向角速度比例系数获得所述自动导向车的纠偏航向角速度包括:
15、根据所述沿第二方向的第四线速度与所述航向角速度比例系数的比值获得所述纠偏航向角速度。
16、可选地,根据所述沿第一方向的第一线速度、航向角偏量、沿目标航向的第二线速度获得所述自动导向车沿实际航向的第三线速度包括:
17、根据所述沿第一方向的第一线速度和所述航向角偏量的正弦值的乘积获得所述沿第一方向的第一线速度在所述实际航向的第一速度分量;
18、根据所述沿目标航向的第二线速度和所述航向角偏量的余弦值的乘积获得所述沿目标航向的第二线速度在所述实际航向的第二速度分量;
19、根据所述实际航向的第一速度分量和所述实际航向的第二速度分量的和获得所述沿实际航向的第三线速度。
20、可选地,根据所述沿第一方向的第一线速度、航向角偏量、沿目标航向的第二线速度获得所述自动导向车沿第二方向的第四线速度包括:
21、根据所述沿第一方向的第一线速度和所述航向角偏量的余弦值的乘积获得所述沿第一方向的第一线速度在所述第二方向的第三速度分量;
22、根据所述沿目标航向的第二线速度和所述航向角偏量的正弦值的乘积获得所述沿目标航向的第二线速度在所述第二方向的第四速度分量;
23、根据所述第二方向的第三速度分量和所述第二方向的第四速度分量的和获得所述沿第二方向的第四线速度。
24、可选地,还包括:
25、判断所述沿第一方向到目标航向的距离偏量是否小于纠偏阈值,并在所述沿第一方向到目标航向的距离偏量小于所述纠偏阈值的情况下,将所述沿第一方向的第一线速度、所述沿第一方向的第一线速度在所述实际航向的第一速度分量和在所述第二方向的第三速度分量设置为0。
26、可选地,基于所述纠偏航向角速度、所述沿实际航向的第三线速度通过差速模型获得左驱动轮电机的纠偏速度包括:
27、根据所述纠偏航向角速度与左右驱动轮之间轴距的二分之一的乘积获得中间值;
28、根据所述沿实际航向的第三线速度与所述中间值的差值获得所述左驱动轮电机的纠偏速度。
29、可选地,基于所述纠偏航向角速度、所述沿实际航向的第三线速度通过差速模型获得右驱动轮电机的纠偏速度包括:
30、根据所述纠偏航向角速度与左右驱动轮之间轴距的二分之一的乘积获得中间值;
31、根据所述沿实际航向的第三线速度与所述中间值的和值获得所述右驱动轮电机的纠偏速度。
32、根据本公开的第二方面,提供一种自动导向车的纠偏系统,自动导向车包括以车体中心为基准的左驱动轮和右驱动轮,纠偏系统包括:
33、相机传感器,位于所述自动导向车的车体中心,用于获取自动导向车的航向角偏量和沿第一方向到目标航向的距离偏量,其中,航向角偏量为目标航向与实际航向之间的夹角,第一方向为垂直于目标航向的方向;以及
34、控制器,用于根据沿第一方向到目标航向的距离偏量、目标航向线速度比例系数、第一方向线速度比例系数获得沿第一方向的第一线速度,根据所述沿第一方向的第一线速度、航向角偏量、沿目标航向的第二线速度获得所述自动导向车沿实际航向的第三线速度、以及沿第二方向的第四线速度,根据沿第二方向的第四线速度、航向角速度比例系数获得所述自动导向车的纠偏航向角速度,并基于所述纠偏航向角速度、所述沿实际航向的第三线速度通过差速模型获得左驱动轮电机的纠偏速度以及右驱动轮电机的纠偏速度,以控制所述自动导向车进行位置纠偏,其中,第二方向为垂直于实际航向的方向。
35、可选地,所述第一方向线速度比例系数和所述航向角速度比例系数为上位机调整的设定值。
36、可选地,所述控制器还基于所述沿第一方向到目标航向的距离偏量、目标航向线速度比例系数、第一方向线速度比例系数的乘积获得所述沿第一方向的第一线速度,其中,所述目标航向线速度比例系数为所述沿目标航向的第二线速度与目标航向的最大目标线速度的比值的绝对值,所述沿目标航向的第二线速度为所述最大目标线速度通过速度规划算法获得。
37、可选地,所述速度规划算法包括s曲线速度规划算法。
38、可选地,所述控制器还根据所述沿第二方向的第四线速度与所述航向角速度比例系数的比值获得所述纠偏航向角速度。
39、可选地,所述控制器还根据所述沿第一方向的第一线速度和所述航向角偏量的正弦值的乘积获得所述沿第一方向的第一线速度在所述实际航向的第一速度分量,以及根据所述沿目标航向的第二线速度和所述航向角偏量的余弦值的乘积获得所述沿目标航向的第二线速度在所述实际航向的第二速度分量,并根据所述实际航向的第一速度分量和所述实际航向的第二速度分量的和获得沿实际航向的第三线速度。
40、可选地,所述控制器还根据所述沿第一方向的第一线速度和所述航向角偏量的余弦值的乘积获得所述沿第一方向的第一线速度在所述第二方向的第三速度分量,以及根据所述沿目标航向的第二线速度和所述航向角偏量的正弦值的乘积获得所述沿目标航向的第二线速度在所述第二方向的第四速度分量,并根据所述第二方向的第三速度分量和所述第二方向的第四速度分量的和获得所述沿第二方向的第四线速度。
41、可选地,所述控制器还用于判断所述沿第一方向到目标航向的距离偏量是否小于纠偏阈值,并在所述沿第一方向到目标航向的距离偏量小于所述纠偏阈值的情况下,将所述沿第一方向的第一线速度、所述沿第一方向的第一线速度在所述实际航向的第一速度分量和在所述第二方向的第三速度分量设置为0。
42、可选地,所述控制器还用于根据所述纠偏航向角速度与左右驱动轮之间轴距的二分之一的乘积获得中间值,以及根据所述沿实际航向的第三线速度与所述中间值的差值获得所述左驱动轮电机的纠偏速度。
43、可选地,所述控制器还用于根据所述纠偏航向角速度与左右驱动轮之间轴距的二分之一的乘积获得中间值,以及根据所述沿实际航向的第三线速度与中间值的和值获得所述右驱动轮电机的纠偏速度。
44、本公开提供的自动导向车的纠偏方法及系统,通过沿第一方向到目标航向的距离偏量、目标航向线速度比例系数、第一方向线速度比例系数获得沿第一方向的第一线速度,以及根据沿第一方向第一线速度、航向角偏量、沿目标航向的第二线速度获得agv沿实际航向的第三线速度、沿第二方向的第四线速度,并根据沿第二方向的第四线速度、航向角速度比例系数获得自动导向车的纠偏航向角速度,进而基于纠偏航向角速度、沿实际航向的第三线速度通过差速模型获得左驱动轮电机的纠偏速度以及右驱动轮电机的纠偏速度,以控制自动导向车进行位置纠偏。即本公开可以通过agv的航向角偏量、沿第一方向到目标航向的距离偏量、目标航向的第二线速度计算得到左驱动轮电机的纠偏速度以及右驱动轮电机的纠偏速度,以实现高效、准确且稳定可靠的导航纠偏。上述方法流程简单、执行速度快,而且纠偏精度高,能够有效解决导航过程中出现的偏差问题。另外,上述方法无需改变agv的机械结构,便可使得agv更加精准地达到目标位置,提高了agv的整体性能和可靠性。
45、进一步地,本公开通过微调第一方向线速度比例系数来改变沿第一方向的第一线速度的大小,以达到调整第一方向的纠偏幅度。进一步通过微调航向角速度比例系数来改变通过沿第一方向的第一线速度计算得到的纠偏航向角速度的大小,进而改变航向角的纠偏幅度,以调整avg的纠偏效果。
46、进一步地,本公开还判断沿第一方向到目标航向的距离偏量是否小于纠偏阈值,并仅在沿第一方向到目标航向的距离偏量超过纠偏阈值时,第一方向上的偏差纠偏才会生效。这使得可以有效防止agv由于频繁的纠偏导致线性运行产生振荡,进而提高了导航纠偏的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!