一种基于改进型飞机刹车冷却风扇最优鲁棒控制方法
本发明属于pid控制优化,尤其涉及一种基于改进型飞机刹车冷却风扇最优鲁棒控制方法。
背景技术:
1、飞机刹车冷却风扇是指在飞机轮胎的轮毂中安装的散热风扇;目前的许多大型客机,最大起飞重量已经超过了3000吨,需要的跑道长度也已经达到了3000米左右;在有限的飞机跑道上面让飞机安全地降落,需要一套强大的减速系统;航空公司经过多年研究发现,新型碳刹车虽然具有寿命长,摩擦力大的优点,但是在80~250度之间的中温区域刹车,对碳刹车的磨损最为严重,为了保证旅客的安全和降低飞机成本,部分大型民航会在飞机轮胎的轮毂中增加散热风扇;控制系统是设计飞机刹车冷却风扇的关键,控制系统的优劣将会直接影响飞机刹车冷却风扇的效率和安全可靠性,进一步讲会影响飞机刹车时的效率和安全。
2、在工程中,电机的控制系统主要采用速度环和电流环双闭环控制;pid控制通过调节三个参数,比例系数(kp)、积分系数(ki)和微分系数(kd)来实现对控制系统的精确控制;pid控制的主要优点是响应速度快、可靠性高和鲁棒性强,适用于各种工业控制过程;传统的pid控制主要靠经验调节参数,不仅需要大量的人力物力,而且在实际的工程应用中,许多控制系统结构复杂,具有高度的非线性和时变不确定性,传统的pid控制难以取得很好的效果;针对这些情况,许多学者提出了各种改进方法,如运用粒子群算法优化pid参数、模糊pid控制和自适应pid控制;但由于控制系统的非线性和复杂性,使得一些算法很难直接应用。
3、光学显微镜算法(oma)是今年提出的一种元启发式算法,模拟了人们使用光学显微镜对物体进行放大的过程:(1)使用物镜对物体进行放大;(2) 使用目镜对物体进行放大过程;使用matlab对其进行数学建模后,将oma的结果与9种元启发式算法的结果进行了比较,结果表明oma性能更优,计算时间更短;并且与其他元启发式算法相比,该算法还具有控制参数少,易于实现的优点;但是与一般的元启发式算法一样,光学显微镜算法存在探索阶段收敛速度慢,开发阶段容易陷入局部最优的问题。
技术实现思路
1、本发明的目的在于:解决光学显微镜算法在探索阶段收敛速度慢,开发阶段容易陷入局部最优的问题,同时针对传统的pid控制方法对于多变量、非线性的交流异步电动机控制系统难以达到良好的控制效果的问题,提出一种新的改进型pid控制方法,利用改进光学显微镜算法优化速度环pid控制参数,增强飞机刹车冷却风扇控制系统的稳定性和鲁棒性。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种基于改进型飞机刹车冷却风扇最优鲁棒控制方法,其特征在于,通过改进光学显微镜优化算法对传统的pid控制器参数进行优化,最后传入速度pid控制器,具体步骤如下。
4、步骤一、通过simulink搭建飞机刹车冷却风扇控制系统仿真模型。
5、步骤二、模拟光学显微镜工作原理,通过matlab编写标准光学显微镜算法,对其进行数学建模,搭建速度pid控制器模型,速度pid控制器通过采集设定转速和实际转速之间的误差值,结合光学显微镜算法计算出的最优pid参数进行计算,使电机转动速度在短时间内快速到达设定速度并稳定在设定转速附近。
6、对标准光学显微镜优化算法改进,引入自适应比例放大系数 m r,改进算法的物镜和目镜位置更新公式,比例放大系数 m r的数学公式为:
7、;
8、式中, m r为自适应比例放大系数, m r为取值在[0,1]之间的随机向量, fit(best)为当前迭代最优个体适应度值, fit(t)为当前个体适应度值。
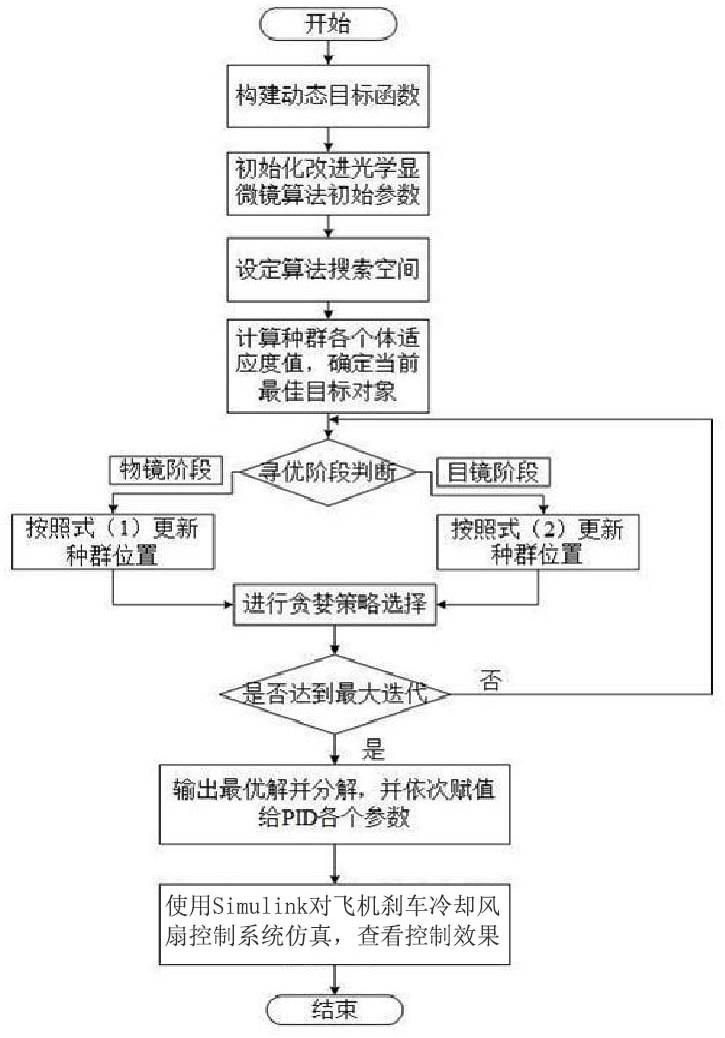
9、步骤四、利用改进光学显微镜算法对速度环pid参数优化,多次迭代得到最优pid控制器的三个参数,具体步骤为:
10、s1、构建动态目标函数,其中目标函数的期望值和在每个时间步骤计算的函数值都是随时间变化的,目标函数的公式为:
11、;
12、式中, x是决策变量,这里设为0.5; t是时间变量, a是一个振幅参数,这里设为1;sin( t)是自变量为t的正弦函数,表示时间的周期性变化;这个函数的期望值(目标值)在每个时间步骤都会发生变化,由 a×sin( t)决定;实时值则是在每个时间步骤下计算得到的函数值。
13、s2、初始化改进光学显微镜优化算法的种群,包括初始化种群个体位置和种群的相关参数,相关参数包括种群总体规模 np、问题维度 dim、搜索空间上下界[ ub, lb]和最大迭代次数 max_iter,初始化个体位置公式为:
14、;
15、式中,为个体 i 的第 j 维变量,和分别为第 j 维变量的下界和上界, r是取值在[0,1]之间的随机数。
16、s3、以pid控制器参数取值范围为算法的搜索空间,以pid控制器参数取值范围为算法的搜索空间,在[lb,ub]范围内随机选取一组pid控制器参数初始化种群。
17、s4、通过适应度函数计算目标种群所有个体的当前适应度值,使其递增排序存放于数组内并标记数组索引,记录当前种群最优适应度值 fit ness。
18、s5、迭代过程中,在调试物镜阶段,引入自适应比例放大系数mr改进种群个体位置更新公式并更新个体位置,计算更新后的目标对象的适应度值;
19、(1);
20、式中,为物镜调试后,第 i个个体的位置;为第 t代种群的最优个体位置;为第 i个个体的位置; m r为自适应比例放大系数。
21、s6、通过目标函数计算的适应度值,根据贪婪选择的策略,将的适应度值与上次迭代中保存的个体最优适应度值比较,保留较小适应度值的个体位置为最新个体位置,更新个体最优适应度值。
22、s7、根据贪婪选择的策略,将当前个体最新位置的适应度值与种群最优适应度值进行比较,保留较小适应度的值为种群最优适应值,更新种群最优个体。
23、s8、在目镜调试阶段,在种群中随机选择一个个体,space计算公式如式(1),若满足,则,将种群个体的位置更新公式设计如式(2),生成新的放大倍数,计算已修改后的目标对象的适应度值;
24、(1);
25、(2);
26、式中,为自适应比例放大系数。
27、s9、得到后,再进行一次贪婪选择,得到下一代种群个体。
28、s10、判断是否达到最大迭代次数,若是,则寻优停止输出最优参数,否则返回s5继续寻优。
29、s11、将最优解的数据赋值给 kp、ki、kd,传入到受控对象中进行仿真,得到最佳数据情况下的模型输出结果。
30、综上所述,由于采用了上述技术方案,本发明的有益效果是:
31、本发明中,通过在标准光学显微镜算法的基础上,引入自适应比例放大系数改进物镜和目镜的比例放大公式,解决光学显微镜算法探索阶段收敛速度较慢,开发阶段容易陷入局部最优的问题,同时针对传统的pid控制方法对于多变量,非线性的飞机冷却风扇控制系统难以达到良好的控制效果的问题,提出一种新的改进型pid控制方法,利用改进光学显微镜算法优化pid控制参数,增强飞机冷却风扇控制系统的稳定性和鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!