吸力桩的工艺参数的动态调控方法、装置、介质、设备与流程
1.本发明涉及海上风电风机基础结构领域,具体涉及一种吸力桩的工艺参数的动态调控方法、装置、介质、设备。
背景技术:
2.海上风电是一种极为重要的清洁能源。近年来,我国海上风电得到跃迁式发展,海上风电已经成为国家能源转型的重要支撑。为了应对复杂海洋地质条件,海上风电基础形式包括单桩基础、吸力桶导管架基础、多桩导管架基础、单柱复合筒基础、漂浮式基础等。单桩基础适用于覆盖层较厚的机位点,吸力桶导管架基础和单柱复合筒能够适用于覆盖层较薄的机位点,多桩导管架基础对覆盖层厚度要求通常介于单桩基础和吸力桶导管架基础之间。相对于多桩导管架基础,吸力桶导管架基础海上作业时间更短,对施工窗口期要求相对较低。
3.由于海上风电场作业海域海况通常比较复杂,连续施工窗口期相对较少,并且由于不同工序间对施工船舶的性能要求不一致,连续施工会影响整个项目工期,并可能增加工程成本,如何获得一种海上风力吸力桩的工艺参数的动态调控的方法,成为设计人员寻求解决的难题。
技术实现要素:
4.因此,本发明要解决的技术问题在于克服现有技术中的无法动态调控海上风力吸力桩的工艺参数的缺陷,从而提供一种吸力桩的工艺参数的动态调控方法、装置、介质、设备。
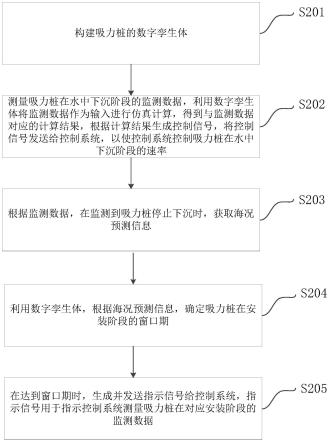
5.第一方面,本发明实施例提供了一种吸力桩的工艺参数的动态调控方法,包括:构建吸力桩的数字孪生体;测量吸力桩在水中下沉阶段的监测数据,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率;根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息;利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期;在达到窗口期时,生成并发送指示信号给控制系统,指示信号用于指示控制系统测量吸力桩在对应安装阶段的监测数据。
6.结合第一方面,在第一方面的一种可能的实现方式中,水中下沉阶段包括自重下沉阶段,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率,包括:利用数字孪生体,根据监测数据,确定吸力桩的自重下沉预测速率;据自重下沉预测速率,生成吸力桩的吊力控制命令;将吊力控制命令发送给控制系统,以使控制系统控制吸力桩在自重下沉阶段的下沉速率。
7.结合第一方面,在第一方面的一种可能的实现方式中,监测数据包括:吸力桩的下沉速率,根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息,包括:当检测到吸
力桩的下沉速率达到预设值时,确定吸力桩停止自重下沉,并获取海况预测信息,海况预测信息为第一海况预测信息。
8.结合第一方面,在第一方面的一种可能的实现方式中,利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期,包括:利用数字孪生体,根据第一海况预测信息,确定吸力桩的受力参数;根据受力参数与窗口期的对应关系,确定吸力桩在负压下沉阶段的窗口期。
9.结合第一方面,在第一方面的一种可能的实现方式中,水中下沉阶段包括负压下沉阶段,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率,包括:利用数字孪生体,根据监测数据,确定吸力桩的负压下沉速率;据负压下沉速率,生成吸力桩的抽水速率控制命令;将抽水速率命令发送给控制系统,以控制吸力桩在负压下沉阶段的下沉速率。
10.结合第一方面,在第一方面的一种可能的实现方式中,监测数据包括吸力桩的桩外和桩内的海床面高程,根据监测数据,确定吸力桩停止下沉时,获取海况预测信息,包括:当检测到吸力桩的桩外和桩内的海床面高程达到预设设计标高时,确定吸力桩停止负压下沉,并获取海况预测信息,海况预测信息为第二海况预测信息。
11.结合第一方面,在第一方面的一种可能的实现方式中,利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期,包括:利用数字孪生体,根据第二海况预测信息,确定吸力桩的承载参数;根据承载参数与窗口期的对应关系,确定吸力桩在风机塔筒和机组吊装阶段或吸力桩灌浆阶段的窗口期。
12.第二方面,本发明实施例提供了一种吸力桩的工艺参数的动态调控装置,包括:构建单元,用于构建吸力桩的数字孪生体;控制信号发送单元,用于测量吸力桩在水中下沉阶段的监测数据,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率;海况预测信息获取单元,用于根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息;窗口期确定单元,用于利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期;指示信号发送单元,用于在达到窗口期时,向控制系统发送指示信号,指示信号用于指示控制系统测量吸力桩在对应阶段的监测数据。
13.第三方面,本发明实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令被处理器执行时,实现如第一方面任一实施方式的吸力桩的工艺参数的动态调控方法。
14.第四方面,本发明实施例提供了一种计算机设备,包括至少一个处理器;以及与至少一个处理器通信连接的存储器;存储器中存储有可计算机程序指令,当指令被至少一个处理器执行,实现如第一方面任一实施方式的吸力桩的工艺参数的动态调控方法。
15.本发明技术方案,具有如下优点:
16.本发明提供的吸力桩的工艺参数的动态调控方法、装置、介质、设备,该方法通过构建并利用吸力桩的数字孪生体,通过吸力桩在水中下沉阶段的监测数据生成控制信号,以控制吸力桩在水中下沉阶段的速率,从而通过测量吸力桩的监测数据,实现吸力桩在水中下沉阶段的参数的动态调整,并通过获取海况预测信息,确定吸力桩在水中下沉阶段的
窗口期,实现吸力桩各阶段间窗口期的确定。根据数字孪生体的输出结果对吸力桩基础结构的安装过程进行指导,为海上风电吸力桩安装提供数据支持,保证工程各环节的合理性,从而减少施工周期,实现工程成本的减少。
附图说明
17.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本发明实施例提供的一种吸力桩的工艺参数的动态调控方法的应用场景示意图
19.图2为本发明实施例提供的一种吸力桩的工艺参数的动态调控方法的一个具体示例的流程图;
20.图3为本发明实施例提供的一种吸力桩的工艺参数的动态调控装置的一个具体示例的原理框图;
21.图4为本发明实施例提供的一种计算机设备的结构示例图。
具体实施方式
22.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
24.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
25.本发明实施例提供的一种吸力桩的工艺参数的动态调控方法的应用场景,如图1所示,包括:吸力桩基础结构1、数字孪生体2、计算机3、信号处理系统4、控制系统5、吸力泵系统6、第一监测设备7、第二监测设备8、第三监测设备9。
26.数字孪生体2为根据物理空间中吸力桩基础结构尺寸参数及水文环境参数、地层分布、土体物理力学参数、cptu(孔压静力触探,piezocone penetration test)勘测数据信息,在计算机3中构建的数字孪生体2。数字孪生体2处于数字空间,与真实环境,即,物理空间相对应。
27.信号处理系统4与计算机3相连通,用于传输第一监测设备7、第二监测设备8、第三监测设备9测量的监测数据至计算机3。控制系统5接收计算机3发送的控制信号,并通过接受的控制信号对吸力桩的安装进行控制。在实际应用中,对吸力桩的安装进行控制包括对吸力泵系统6的控制,控制系统5通过控制命令控制吸力泵系统6调节吸力桩安装过程中的
吸力泵抽水速度。
28.吸力桩基础结构1包括:多个吸力桶、导管架主体结构、吸水泵。导管架主体结构包括基础结构顶法兰面。
29.第一监测设备7、第二监测设备8、第三监测设备9分别为不同的监测设备,监测设备包括:gps罗经、倾斜仪、压力传感器、水位传感器。在实际应用中,第一监测设备7为gps罗经,第二监测设备8为倾斜仪,第三监测设备9为压力传感器,应该理解的是,监测设备的设置与数量包括但不限定于图1所示。与基础结构顶法兰面相关的监测数据包括:基础结构顶法兰面方位角、基础结构顶法兰面水平度,与吸力桶相关的监测数据包括:桶内压力、桶外压力、抽水水位,与吸力桩基础结构相关的其他监测数据包括:吸力桩的桩外和桩内的海床面高程、吸力桩下沉速率。
30.本实施例提供一种吸力桩的工艺参数的动态调控方法,如图2所示,包括如下步骤:
31.s201、构建吸力桩的数字孪生体。
32.具体地,构建吸力桩的数字孪生体包括:获取吸力桩的结构参数和安装环境参数;基于结构参数和安装环境参数,构建吸力桩的数字孪生体。
33.在实际应用中,吸力桩的结构参数包括吸力桶导管架基础结构尺寸参数,吸力桶导管架基础结构尺寸参数包括:吸力桶导管架基础结构高度参数、吸力桶直径参数、吸力桶高度参数、吸力桶中心距参数、导管腿中心顶距离参数、吸力桶预设入泥深度参数中的一种或多种。安装环境参数包括吸力桩安装位置的水文环境参数、地层分布、土体物理力学参数、cptu勘测数据等信息。应该理解的是,基于结构参数和安装环境参数,构建吸力桩的数字孪生体属于较为成熟的技术,对此不再进行赘述。
34.s202、测量吸力桩在水中下沉阶段的监测数据,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率。
35.具体地,吸力桩在水中下沉阶段包括:自重下沉阶段和负压下沉阶段。吸力桩在水中下沉阶段的监测数据包括:基础结构顶法兰面方位角、基础结构顶法兰面水平度、桶内压力、桶外压力、抽水水位、吸力桩下沉速率、吸力桩的桩外和桩内的海床面高程或其他监测数据,在实际应用中,吸力桩在水中下沉阶段的监测数据通过监测设备获取,监测设备包括但不限定于gps罗经、倾斜仪、压力传感器、水位传感器。在实际应用中,与测量数据相对应的计算结果包括:吸力桩的自重下沉预测速率、土体阻力、吸力桩的负压下沉抽水速率或其他结果,应该理解的是,利用数字孪生体进行仿真计算属于较为成熟的技术,对此不再进行赘述。值得说明的是,根据吸力桩在水中下沉阶段的监测数据,实施更新吸力桩数字孪生体的地层分布及相应的土体物理力学参数,以保证仿真计算的准确性,地层分布是指吸力桩的桩外准确的地层分布以及由于土塞效应引起的桩内地层分布的改变。
36.s203、根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息。
37.具体地,根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息是指根据吸力桩在不同水中下沉阶段中测量的监测数据的不同,判断吸力桩是否停止对应水中下沉阶段,并在吸力桩停止对应水中下沉阶段时,获取海况预测信息。在实际应用中,海况预测信息包括:风力荷载信息、波流荷载信息、海流荷载信息或其他信息。
38.s204、利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期。
39.具体地,利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期是指利用数字孪生体将海况预测信息作为输入进行仿真计算,得到与海况预测信息对应的计算结果,并根据计算结果确定吸力桩在对应安装阶段的窗口期。吸力桩的安装阶段包括:吸力桩在水中下沉阶段、风机塔筒和机组吊装阶段以及吸力桩灌浆阶段。在实际应用中,与海况预测信息对应的计算结果包括:极端工况下吸力桩的结构受力与变形、基础顶法兰面水平度或其他结果,应该理解的是,利用数字孪生体进行仿真计算属于较为成熟的技术,对此不再进行赘述。
40.s205、在达到窗口期时,生成并发送指示信号给控制系统,指示信号用于指示控制系统测量吸力桩在对应安装阶段的监测数据。
41.具体地,在达到窗口期时,生成并发送指示信号给控制系统是指在达到对应安装阶段的窗口期时,通过生成并发送指示信号,进行安装阶段中下一阶段的监测数据测量。在实际应用中,吸力桩在自重下沉阶段停止下沉时,利用数字孪生体,根据海况预测信息,确定吸力桩在负压下沉阶段的窗口期,在达到负压下沉阶段的窗口期时,通过指示信息指示控制系统进行负压下沉阶段监测数据的测量,从而进行吸力桩在负压下沉阶段的参数动态调控。吸力桩在负压下沉阶段停止下沉时,利用数字孪生体,根据海况预测信息,确定吸力桩在风机塔筒和机组吊装阶段或吸力桩灌浆阶段的窗口期,在达到风机塔筒和机组吊装阶段或吸力桩灌浆阶段的窗口期时,通过指示信息指示控制系统进行风机塔筒和机组吊装阶段或吸力桩灌浆阶段监测数据的测量,从而进行风机塔筒和机组吊装阶段或吸力桩灌浆阶段的参数动态调控。
42.通过实施本实施例,通过构建并利用吸力桩的数字孪生体,通过吸力桩在水中下沉阶段的监测数据生成控制信号,以控制吸力桩在水中下沉阶段的速率,从而通过测量吸力桩的监测数据,实现吸力桩在水中下沉阶段的参数的动态调整,并通过获取海况预测信息,确定吸力桩在水中下沉阶段的窗口期,实现吸力桩各阶段间窗口期的确定。根据数字孪生体的输出结果对吸力桩基础结构的安装过程进行指导,为海上风电吸力桩安装提供数据支持,保证工程各环节的合理性,从而减少施工周期,实现工程成本的减少。
43.在实际应用中,吸力桩由运输船运输至施工地点后,由施工船起吊吸力桶导管架基础结构,并通过控制施工船的吊力大小实现吸力桩的自重下沉,即,吸力桩的自重等于土体阻力与吊钩吊力的和,吸力桩的下沉速率与吊钩吊力的大小相关。但是,在实际应用中,施工人员仅能凭借自身经验控制吸力桩的吊钩吊力的大小,无法保证控制过程的客观性与准确性。因此,为避免吸力桩下沉速度过快,使得吸力桩发生变形;或避免吸力桩下沉速度过慢,延长工期,使得工程成本增加,提出了如下可选实施方式。
44.在一个可选实施方式中,上述步骤s202中,水中下沉阶段包括自重下沉阶段,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率的具体过程,包括:
45.(1)利用数字孪生体,根据监测数据,确定吸力桩的自重下沉预测速率。
46.在实际应用中,利用数字孪生体,根据监测数据,确定吸力桩的自重下沉预测速率,并将吸力桩的自重下沉预测速率作为与监测数据对应的计算结果属于较为成熟的技
术,在此不再进行赘述。
47.(2)根据自重下沉预测速率,生成吸力桩的吊力控制命令。
48.具体地,根据自重下沉预测速率,生成吸力桩的吊力控制命令是指自重下沉预测速率与预设下沉速率范围的对应关系,生成对应的吸力桩的吊力控制命令。
49.在实际应用中,在自重下沉预测速率超过预设下沉速率范围时,生成加大吊力的吊力控制命令;在自重下沉预测速率低于预设下沉速率范围时,生成减小吊力的吊力控制命令;在自重下沉预测速率符合预设下沉速率范围时,生成维持吊力的吊力控制命令。
50.(3)将吊力控制命令发送给控制系统,以使控制系统控制吸力桩在自重下沉阶段的下沉速率。
51.在实际应用中,控制系统接收到吊力控制命令后,将吊力控制命令发送至对应施工船,以控制对应吸力桩的吊力,从而实现控制吸力桩在自重下沉阶段的下沉速率。
52.通过实施本实施例,通过测量吸力桩在自重下沉阶段的监测数据,并将对应监测数据作为数字孪生体的输入值,确定吸力桩的自重下沉预测速率,并通过自重下沉预测速率与预设下沉速率范围的对应关系,生成对应的吸力桩的吊力控制命令,以使控制系统控制吸力桩在自重下沉阶段的下沉速率。这一过程以监测数据及自重下沉预测速率作为数据支撑,有效地保证了控制过程的客观性与准确性,保证工程环节的合理性,从而减少施工周期,实现工程成本的减少。
53.在一个可选实施方式中,上述步骤s203中,根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息的具体过程,包括:
54.当检测到吸力桩的下沉速率达到预设值时,确定吸力桩停止自重下沉,并获取海况预测信息,海况预测信息为第一海况预测信息。
55.具体地,预设值可以根据实际工况进行设定,在实际应用中,通常选取零作为预设值。在实际应用中,检测到吸力桩的下沉速率达到预设值表示吸力桩自重下沉阶段结束。
56.在一个可选实施方式中,上述步骤s204中,利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期的具体过程,包括:
57.(1)利用数字孪生体,根据第一海况预测信息,确定吸力桩的受力参数。
58.具体地,利用数字孪生体,根据第一海况预测信息,确定吸力桩的受力参数是指将第一海况预测信息作为输入参数输入数字孪生体,仿真计算极端工况下吸力桩的受力参数。吸力桩的受力参数包括:吸力桶导管架基础结构的受力与变形、基础顶法兰面水平度或其他参数。
59.(2)根据受力参数与窗口期的对应关系,确定吸力桩在负压下沉阶段的窗口期。
60.具体地,根据受力参数与窗口期的对应关系,确定吸力桩在负压下沉阶段的窗口期是指根据受力参数判断吸力桩在极端工况下的稳定性,确定在极端工况下现有吸力桩结构保持不发生结构变形的时间。
61.通过实施本实施例,利用数字孪生体,根据海况预测信息,确定吸力桩在负压下沉阶段的窗口期,这一过程相当于确定了吸力桩在极端工况下不发生结构变形的时间,从而为后续发送指示信息,开展下一阶段,即负压下沉阶段监测数据的测量提供数据基础,在保证工程安全的基础上,充分利用施工窗口期,调动船舶资源,进一步减少工程成本。
62.在实际应用中,吸力桩在结束自重下沉阶段后进入负压下沉阶段,在负压下沉阶
段通过吸力泵抽出吸力桩内的海水形成负压,吸力桩在负压作用下进入沉贯阶段,这一过程即为负压下沉阶段。在实际应用中,为避免抽水速率过快,引起桶体变形;或,避免抽水速率过慢,延长工期,使得工程成本增加,提出了如下可选实施方式。
63.在一个可选实施方式中,上述步骤s202中,水中下沉阶段包括负压下沉阶段,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率的具体过程,包括:
64.(1)利用数字孪生体,根据监测数据,确定吸力桩的负压下沉速率。
65.在实际应用中,利用数字孪生体,根据监测数据,确定吸力桩的负压下沉速率,并将吸力桩的负压下沉速率作为与监测数据对应的计算结果属于较为成熟的技术,在此不再进行赘述。
66.(2)根据负压下沉速率,生成吸力桩的抽水速率控制命令。
67.具体地,根据负压下沉速率,生成吸力桩的抽水速率控制命令是指负压下沉速率与预设下沉抽水速率范围的对应关系,生成对应的吸力桩的抽水速率控制命令。
68.在实际应用中,在负压下沉速率超过预设下沉抽水速率范围时,生成降低吸水泵功率的抽水速率控制命令;在负压下沉速率低于预设下沉抽水速率范围时,生成提高吸水泵功率的抽水速率控制命令;在负压下沉速率符合预设下沉抽水速率范围时,生成维持吸水泵功率的抽水速率控制命令。
69.(3)将抽水速率命令发送给控制系统,以控制吸力桩在负压下沉阶段的下沉速率。
70.在实际应用中,控制系统接收到抽水速率命令后,将抽水速率命令发送至吸力泵系统,以使吸力泵系统对对应吸力泵的功率进行调节,从而实现控制吸力桩在负压下沉阶段的负压下沉速率。
71.通过实施本实施例,通过测量吸力桩在负压下沉阶段的监测数据,并将对应监测数据作为数字孪生体的输入值,确定吸力桩的负压下沉速率,并通过负压下沉速率与预设下沉抽水速率范围的对应关系,生成对应的吸力桩的抽水速率控制命令,以使控制系统控制吸力桩在负压下沉阶段的负压下沉速率。这一过程以监测数据及负压下沉速率作为数据支撑,有效地保证了控制过程的客观性与准确性,保证工程环节的合理性,从而减少施工周期,实现工程成本的减少。
72.在一个可选实施方式中,上述步骤s203中,监测数据包括:吸力桩的桩外和桩内的海床面高程,根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息的具体过程,包括:
73.当检测到吸力桩的桩外和桩内的海床面高程达到预设设计标高时,确定吸力桩停止负压下沉,并获取海况预测信息,海况预测信息为第二海况预测信息。
74.具体地,预设设计标高可以根据实际工况进行设定,在实际应用中,由于每个桶位置的海床面高程略有差异,各吸力桶的预设设计标高不同。在实际应用中,检测到吸力桩的桩外和桩内的海床面高程达到预设设计标高时表示吸力桩负压下沉阶段结束。在实际应用中,吸力桩的桩外和桩内的海床面高程是指吸力桶顶部距离海床面的高度,检测到吸力桩的海床面高程达到预设设计标高是指吸力桩在负压作用下进入沉贯阶段的距离,达到预设距离。
75.在一个可选实施方式中,上述步骤s204中,利用数字孪生体,根据海况预测信息,确定吸力桩在安装阶段的窗口期的具体过程,包括:
76.(1)利用数字孪生体,根据第二海况预测信息,确定吸力桩的承载参数。
77.具体地,利用数字孪生体,根据第二海况预测信息,确定吸力桩的承载参数是指将第二海况预测信息作为输入参数输入数字孪生体,仿真计算极端工况下吸力桩的承载参数。吸力桩的承载参数包括:吸力桶导管架基础结构的受力与变形、基础顶法兰面水平度或其他参数。
78.(2)根据承载参数与窗口期的对应关系,确定吸力桩在风机塔筒和机组吊装阶段或吸力桩灌浆阶段的窗口期。
79.具体地,根据承载参数与窗口期的对应关系,确定吸力桩在风机塔筒和机组吊装阶段或吸力桩灌浆阶段的窗口期是指根据承载参数判断吸力桩在极端工况下的承载情况,确定在极端工况下现有吸力桩结构保持不发生结构变形的时间。
80.在一个可选实施方式中,在确定吸力桩在风机塔筒和机组吊装阶段或吸力桩灌浆阶段的窗口期之后,吸力桩的工艺参数的动态调控方法,还包括:
81.根据吸力桩的承载参数与预设承载参数的对应关系,确定吸力桩进行风机塔筒和机组吊装阶段,与吸力桩灌浆阶段的工序。
82.具体地,预设承载参数可根据实际工况进行设定,由于施工位置水文环境的不同,对吸力桩的影响也不同,本技术对此不作具体限定。
83.在实际应用中,在吸力桩的承载参数超过预设承载参数时,吸力桩先进行风机塔筒和机组吊装阶段对应工序,再进行吸力桩灌浆阶段对应工序;在吸力桩的承载参数未达到预设承载参数时,吸力桩先进行吸力桩灌浆阶段对应工序,再进行风机塔筒和机组吊装阶段对应工序。
84.通过实施本实施例,利用数字孪生体,根据海况预测信息,确定吸力桩在风机塔筒和机组吊装阶段或吸力桩灌浆阶段阶段的窗口期,这一过程相当于确定了吸力桩在极端工况下不发生结构变形的时间,从而为后续发送指示信息,开展下一阶段监测数据的测量提供数据基础,在保证工程安全的基础上,充分利用施工窗口期,调动船舶资源,进一步减少工程成本。
85.本实施例提供一种吸力桩的工艺参数的动态调控装置,如图3所示,包括:构建单元31、控制信号发送单元32、海况预测信息获取单元33、窗口期确定单元34、指示信号发送单元35。
86.构建单元31,用于构建吸力桩的数字孪生体。具体过程可参见上述实施例关于步骤s201的相关描述,在此不再赘述。
87.控制信号发送单元32,用于测量吸力桩在水中下沉阶段的监测数据,利用数字孪生体将监测数据作为输入进行仿真计算,得到与监测数据对应的计算结果,根据计算结果生成控制信号,将控制信号发送给控制系统,以使控制系统控制吸力桩在水中下沉阶段的速率。具体过程可参见上述实施例关于步骤s202的相关描述,在此不再赘述。
88.海况预测信息获取单元33,用于根据监测数据,在监测到吸力桩停止下沉时,获取海况预测信息。具体过程可参见上述实施例关于步骤s203的相关描述,在此不再赘述。
89.窗口期确定单元34,用于利用数字孪生体,根据海况预测信息,确定吸力桩在安装
programmable logic device,cpld),现场可编程逻辑门阵列(field-programmable gate array,fpga),通用阵列逻辑(generic array logic,gal)或其任意组合。
98.可选地,存储器44还用于存储程序指令。处理器41可以调用程序指令,实现本发明任一实施例中所述的吸力桩的工艺参数的动态调控方法。
99.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1