一种欠驱动水下机器人鲁棒轨迹跟踪控制方法
本发明涉及三维轨迹跟踪控制领域,具体涉及一种欠驱动水下机器人鲁棒轨迹跟踪控制方法。
背景技术:
1、海洋占据地球的70%以上,并且存在丰富的矿产和水下生物资源。自主水下机器人是实现海洋勘探、目标检测、探测任务等海底工作的重要工具。欠驱动自主水下机器人减少了执行器数量,降低了能源消耗、减轻了系统质量,提高了系统其余推进器的推进效率及系统可靠性。轨迹跟踪控制研究是欠驱动自主水下机器人完成各种水下作业的基础,也是运动控制领域的研究热点。因此欠驱动自主水下机器人轨迹跟踪控制研究具有重要的现实意义。
2、然而,欠驱动自主水下机器人系统具有高度非线性和强耦合性,在海洋环境下还受到洋流干扰的问题,并且与全驱动式水下机器人相比,欠驱动式水下机器人为了减少系统的成本和维护,系统执行器数量少于自由度,许多控制算法在欠驱动系统上都无法实现预期控制效果。因此,欠驱动水下机器人的跟踪控制问题比全驱动水下机器人的跟踪控制问题更加困难和复杂。如何设计控制器,保证欠驱动水下机器人系统在复杂海洋环境中平稳可靠地进行轨迹跟踪任务具有重要的研究价值和意义。
3、目前常用的技术有pid控制、滑模控制、自适应控制等。pid控制技术不需要精确的系统模型且大部分情况下具有可接受的控制性能,然而pid控制抗干扰能力不强,控制速度缓慢且调参复杂,无法应对突变的扰动问题。滑模控制具有响应快、对外部扰动及内部参数变化不灵敏等优点,但是实际控制轨迹到达滑模面的时候不能沿着平衡点滑动,而是在平衡点附近来回穿越,即存在抖振问题。自适应控制能够通过实时调整控制器参数来适应外部扰动或者其它干扰,然而,自适应控制算法计算量较大且会引入较多可调参数。
4、近年来对于欠驱动水下机器人的外部扰动问题,常见的控制方法通常是设计状态观测器或者采用各类神经网络来逼近,然后设计控制律,使系统能够实现轨迹跟踪控制,并且保证误差的全局收敛。但是,观测器观测效果依赖观测增益;神经网络的运算复杂以及在线计算速度有限导致一些不可避免的问题,比如控制器参数难以确定、系统计算负担大,可能引起计算爆炸问题、无法实现系统状态在有限的时间内收敛等。
5、在设计控制器的时候要对辅助控制器进行求导,由于辅助控制器的变化较大,很可能引起计算爆炸问题。目前常用的方法是采用动态面控制技术,引入滤波器来估计辅助控制器及其导数,以此降低计算负担,但是普通一阶滤波器没有考虑到辅助控制器输入导数未知上界的估计问题。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种欠驱动水下机器人鲁棒轨迹跟踪控制方法解决了现有欠驱动水下机器人跟踪控制难的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、提供一种欠驱动水下机器人鲁棒轨迹跟踪控制方法,其包括以下步骤:
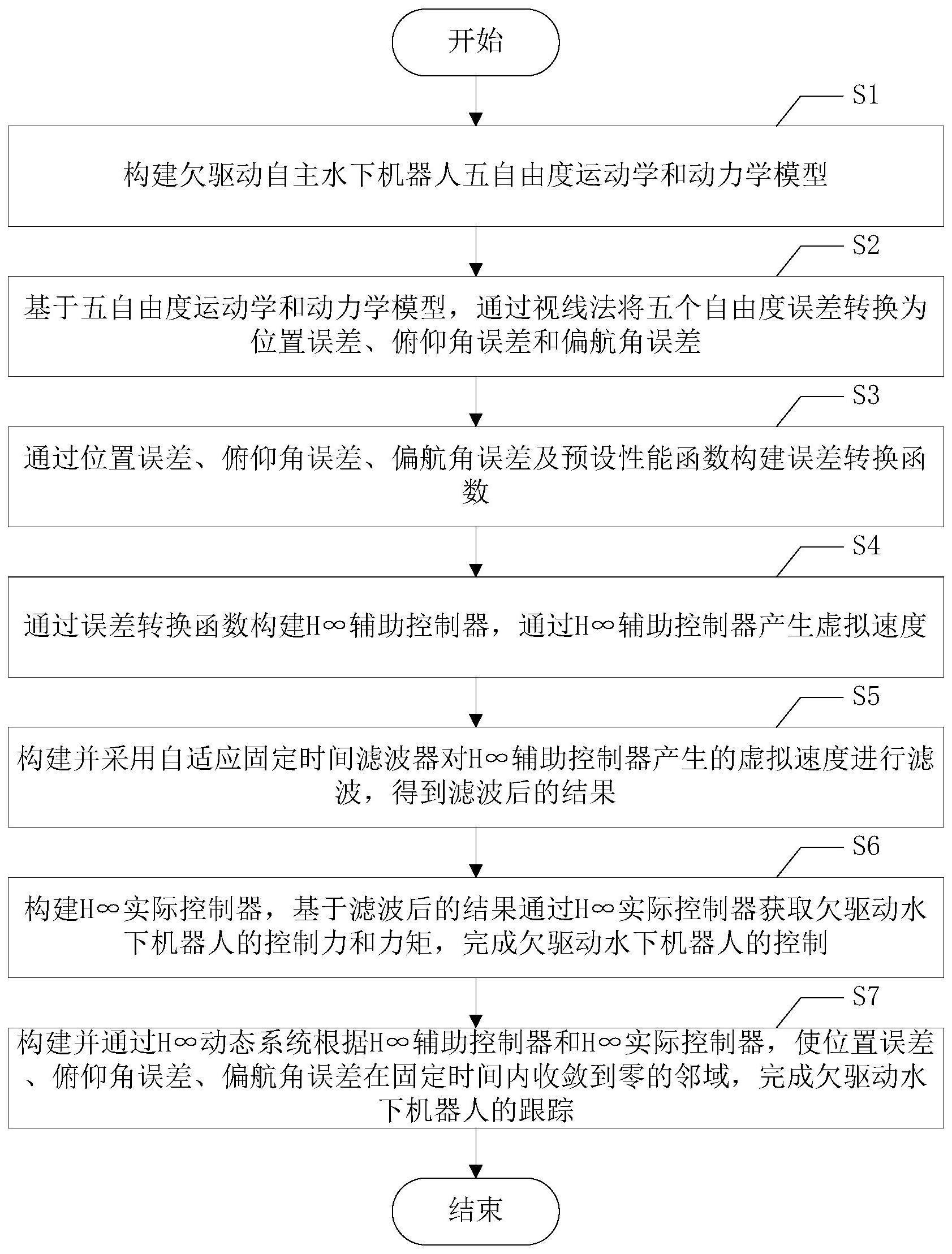
4、s1、构建欠驱动自主水下机器人五自由度运动学和动力学模型;
5、s2、基于五自由度运动学和动力学模型,通过视线法将五个自由度误差转换为位置误差、俯仰角误差和偏航角误差;
6、s3、通过位置误差、俯仰角误差、偏航角误差及预设性能函数构建误差转换函数;
7、s4、通过误差转换函数构建h∞辅助控制器,通过h∞辅助控制器产生虚拟速度;
8、s5、构建并采用自适应固定时间滤波器对h∞辅助控制器产生的虚拟速度进行滤波,得到滤波后的结果;
9、s6、构建h∞实际控制器,基于滤波后的结果通过h∞实际控制器获取欠驱动水下机器人的控制力和力矩,完成欠驱动水下机器人的控制;
10、s7、构建并通过h∞动态系统根据h∞辅助控制器和h∞实际控制器,使位置误差、俯仰角误差、偏航角误差在固定时间内收敛到零的邻域,完成欠驱动水下机器人的跟踪。
11、进一步地,五自由度运动学和动力学模型表达式为:
12、
13、
14、其中(x,y,z)表示欠驱动自主水下机器人的真实位移;θ表示俯仰角;表示偏航角;(u,v,w,q,r)分别表示x,y,z,θ,方向上的真实速度;fu、fv、fw、fq和fr表示时变未知海洋扰动;d11、d22、d33、d55和d66表示水动力系数;m11、m22、m33、m55和m66表示质量和惯性参数;τu、τq和τr表示待设计的控制器;ρ表示海水密度;g表示重力加速度;δ表示海水排水量;表示纵向稳心高度;字符上一点表示求导。
15、进一步地,步骤s2的具体方法为:
16、根据公式:
17、
18、获取位置误差ρe、俯仰角误差θe和偏航角误差其中(xe,ye,ze)为体坐标系中跟踪位置误差。
19、进一步地,体坐标系中跟踪位置误差的计算表达式为:
20、
21、其中(xd,yd,zd)表示期望的时变三维轨迹。
22、进一步地,步骤s3的具体方法为:
23、根据公式:
24、
25、构建预设性能函数其中ν*={u,q,r},和均为大于0的常数;t表示时间;
26、根据公式:
27、
28、构建误差转换函数;其中为转换后的位置误差函数;为转换后的俯仰角误差函数;为转换后的偏航角误差函数;
29、进一步地,步骤s4中h∞辅助控制器的表达式为:
30、
31、其中:
32、
33、
34、
35、表示虚拟速度,包括x、θ和方向的虚拟速度;为预设性能函数;和l均为大于0的增益参数;为误差转换函数;sig(·)表示sign函数,(sig(·))2a-1=sgn(·)|·|2a-1,(sig(·))2b-1=sgn(·)|·|2b-1;和为中间参数;(xd,yd,zd)表示期望的时变三维轨迹。
36、进一步地,步骤s5中自适应固定时间滤波器的表达式为:
37、
38、其中κ和μ均为滤波器参数;为未知正常量的估计值;为滤波误差,为滤波后的结果;sign(·)表示sign函数;a和b均为指数参数,0<a<1,b>1。
39、进一步地,步骤s6中h∞实际控制器的表达式为:
40、
41、
42、
43、其中为欠驱动水下机器人的控制力和力矩,包括欠驱动水下机器人在x、θ和方向的控制力和力矩;和为增益参数;νe为速度误差变量,λ2为大于0的常数;υ为大于0的实数。
44、进一步地,步骤s7中h∞动态系统的表达式为:
45、
46、
47、其中fν*={fu,fq,fr},fu为x方向的外部不确定性扰动,fq为θ方向的外部不确定性扰动,fr为方向的外部不确定性扰动;
48、本发明的有益效果为:本发明在保证跟踪误差快速收敛的前提下,具有较高的稳定性和鲁棒性,并且不受系统的初始状态的影响,可以较好地进行欠驱动水下机器人轨迹跟踪控制。
- 还没有人留言评论。精彩留言会获得点赞!