一种机器人的路径规划方法、装置及设备与流程
本技术属于机器人,尤其涉及一种机器人的路径规划方法、装置及设备。
背景技术:
1、在智能设备越发普及的今天,智能门控作为安防系统中的重要组成部分,已经广泛地运用在工厂、商场、展厅等大量机器人应用场景中,提供更便捷、更安全的保障。传统的机器人路径规划方法中,机器人通常是利用激光或视觉传感器建立底层的导航地图,这种建图方式在扫图的过程无法准确识别出智能门控,从而导致在机器人导航中出现无法通过的障碍,无法顺利到达目标地点。所以,为了使机器人顺利通过门控,现有技术中会在机器人本体预置行进轨道以及相关的门控信息,以既定的路线出行,常见的有餐厅和酒店的送餐机器人。
2、但是,预设轨道通过门控的方式并不能适用各种作业场景,当机器人不需要既定的路线出行,需要自由导航时,就无法控制机器人顺利通过门控。
技术实现思路
1、本技术实施例提供了一种机器人的路径规划方法、装置及设备,可以解决上述技术问题。
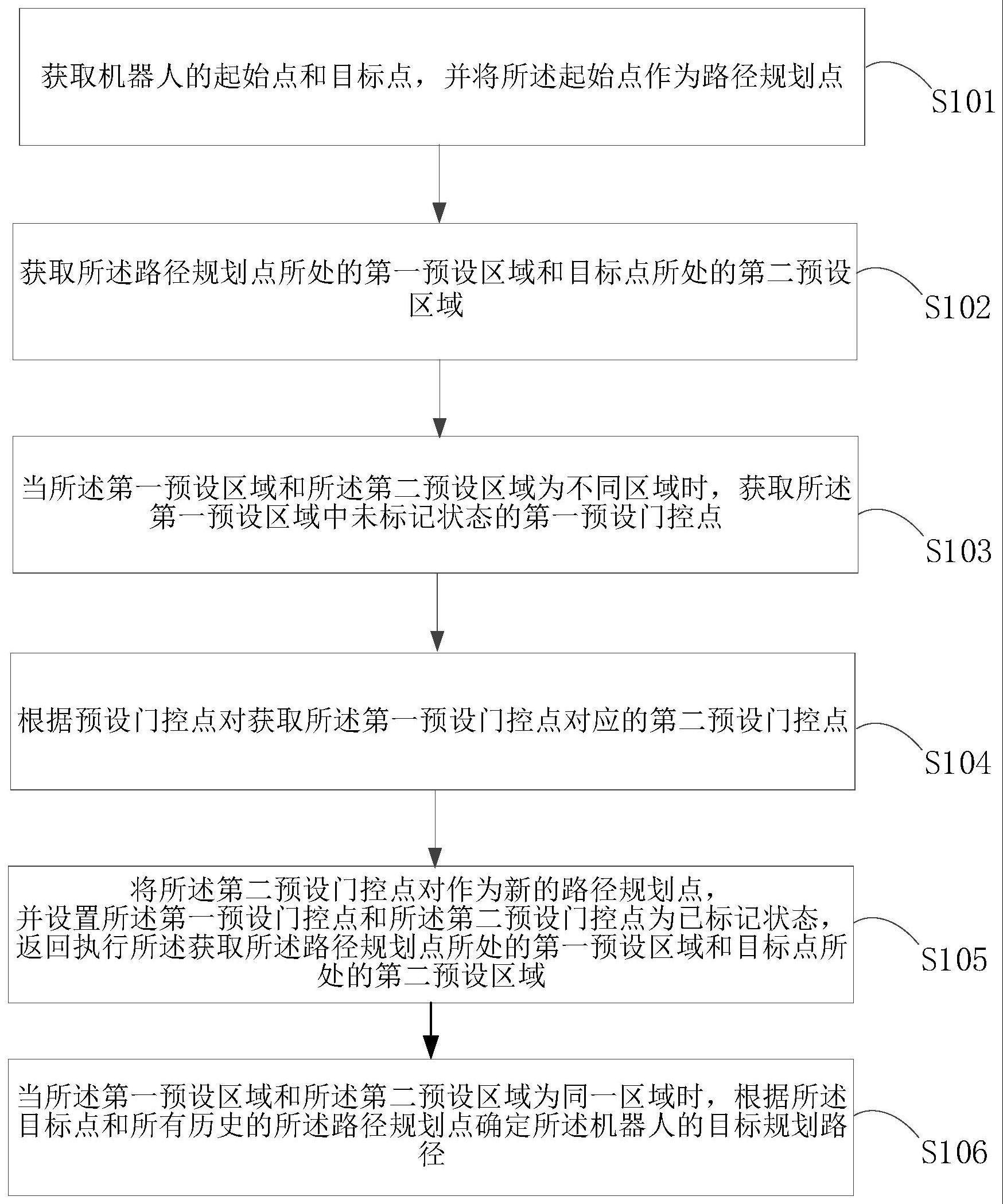
2、第一方面,本技术实施例提供了一种机器人的路径规划方法,包括:获取机器人的起始点和目标点,并将所述起始点作为路径规划点;获取所述路径规划点所处的第一预设区域和目标点所处的第二预设区域;当所述第一预设区域和所述第二预设区域为不同区域时,获取所述第一预设区域中未标记状态的第一预设门控点;根据预设门控点对获取所述第一预设门控点对应的第二预设门控点;将所述第二预设门控点对作为新的路径规划点,并设置所述第一预设门控点和所述第二预设门控点为已标记状态,返回执行所述获取所述路径规划点所处的第一预设区域和目标点所处的第二预设区域;当所述第一预设区域和所述第二预设区域为同一区域时,根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径。
3、进一步地,在所述当所述第一预设区域和所述第二预设区域为不同区域时,获取所述第一预设区域中未标记状态的第一预设门控点之后,还包括:当所述第一预设区域中不存在预设门控点时,执行所述根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径。
4、进一步地,在所述当所述第一预设区域和所述第二预设区域为不同区域时,获取所述第一预设区域中未标记状态的第一预设门控点之后,还包括:当所述第一预设区域中不存在未标记状态的第一预设门控点时,执行所述根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径。
5、进一步地,所述当所述第一预设区域和所述第二预设区域为同一区域时,根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径,包括:当所述第一预设区域和所述第二预设区域为同一区域时,根据所述预设门控点对获取所有历史的所述路径规划点的目标门控点对;根据所述目标点和所述目标门控点对确定所述机器人的目标规划路径。
6、进一步地,所述目标规划路径包括所述起始点、所述目标点、目标门控的目标开门点和目标关门点;在所述根据所述目标点和所述目标门控点对确定所述机器人的目标规划路径之后,还包括:当机器人处于所述目标开门点时,调用所述目标门控对应的开门指令执行开门操作;当机器人处于所述目标关门点时,调用所述目标门控对应的关门指令执行关门操作。
7、进一步地,所述当所述第一预设区域和所述第二预设区域为同一区域时,根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径,包括:当所述第一预设区域和所述第二预设区域为同一区域时,根据所述目标点和所有历史的所述路径规划点确定所述机器人的初始规划路径;其中,所述初始规划路径的数量为至少两个;获取所述初始规划路径的行驶代价信息,并根据所述行驶代价信息从所述初始规划路径中确定所述机器人的目标规划路径。
8、第二方面,本技术实施例提供了一种机器人的路径规划装置,包括:第一处理单元,用于获取机器人的起始点和目标点,并将所述起始点作为路径规划点;第一获取单元,用于获取所述路径规划点所处的第一预设区域和目标点所处的第二预设区域;第二获取单元,用于当所述第一预设区域和所述第二预设区域为不同区域时,获取所述第一预设区域中未标记状态的第一预设门控点;第三获取单元,用于根据预设门控点对获取所述第一预设门控点对应的第二预设门控点;第二处理单元,用于将所述第二预设门控点对作为新的路径规划点,并设置所述第一预设门控点和所述第二预设门控点为已标记状态,返回执行所述获取所述路径规划点所处的第一预设区域和目标点所处的第二预设区域;第三处理单元,用于当所述第一预设区域和所述第二预设区域为同一区域时,根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径。
9、进一步地,机器人的路径规划装置,还包括:
10、第四处理单元,用于当所述第一预设区域中不存在预设门控点时,执行所述根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径。
11、进一步地,机器人的路径规划装置,还包括:
12、当所述第一预设区域中不存在未标记状态的第一预设门控点时,执行所述根据所述目标点和所有历史的所述路径规划点确定所述机器人的目标规划路径。
13、进一步地,所述第三处理单元,具体用于:
14、当所述第一预设区域和所述第二预设区域为同一区域时,根据所述预设门控点对获取所有历史的所述路径规划点的目标门控点对;
15、根据所述目标点和所述目标门控点对确定所述机器人的目标规划路径。
16、进一步地,所述第三处理单元,具体还用于:
17、当机器人处于所述目标开门点时,调用所述目标门控对应的开门指令执行开门操作;
18、当机器人处于所述目标关门点时,调用所述目标门控对应的关门指令执行关门操作。
19、进一步地,所述第三处理单元,具体用于:
20、当所述第一预设区域和所述第二预设区域为同一区域时,根据所述目标点和所有历史的所述路径规划点确定所述机器人的初始规划路径;其中,所述初始规划路径的数量为至少两个;
21、获取所述初始规划路径的行驶代价信息,并根据所述行驶代价信息从所述初始规划路径中确定所述机器人的目标规划路径。
22、第三方面,本技术实施例提供了一种机器人的路径规划设备,包括处理器、存储器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上述第一方面的方法。
23、第四方面,本技术实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现如上述第一方面的方法。
24、本技术实施例中,获取机器人的起始点和目标点,并将起始点作为路径规划点;获取路径规划点所处的第一预设区域和目标点所处的第二预设区域;当第一预设区域和第二预设区域为不同区域时,获取第一预设区域中未标记状态的第一预设门控点;根据预设门控点对获取第一预设门控点对应的第二预设门控点;将第二预设门控点对作为新的路径规划点,并设置第一预设门控点和第二预设门控点为已标记状态,返回执行获取所述路径规划点所处的第一预设区域和目标点所处的第二预设区域;当第一预设区域和第二预设区域为同一区域时,根据目标点和所有历史的路径规划点确定机器人的目标规划路径。上述路径规划方法,在智能门控存在的业务场景下,当机器人需要自由导航时,为机器人提供路径规划时,可以准确识别出门控位置,从而可辅助机器人顺利开启门控并通过,引导机器人行至目标地点。
- 还没有人留言评论。精彩留言会获得点赞!