一种非合作目标全自主交会方法与流程
本发明涉及卫星制导、导航与控制技术,具体涉及高、中、低轨卫星的非合作目标自主交会方法。
背景技术:
1、随着在轨航天器的日益剧增,一个服务航天器作为主星能够在指定时间内与非合作目标航天器自主交会,并对其进行在轨服务的任务需求愈加强烈。因此在非遥测遥控弧段(无地面支持情况下)完成与非合作目标航天器的高精度自主交会,如何全自主和保证两星安全性是目前需要解决的首要问题。
技术实现思路
1、本发明基于星上自主导航和目标轨道预报信息,解决通过地面制定策略再上注星上的方法耗时长以及受到遥测遥控弧段限制实时性差的技术难点,实现了燃料最优时效性强的自主交会流程。
2、为解决上述技术问题,本发明是通过以下的技术方案实现的,一种非合作目标全自主交会方法,包括如下步骤:
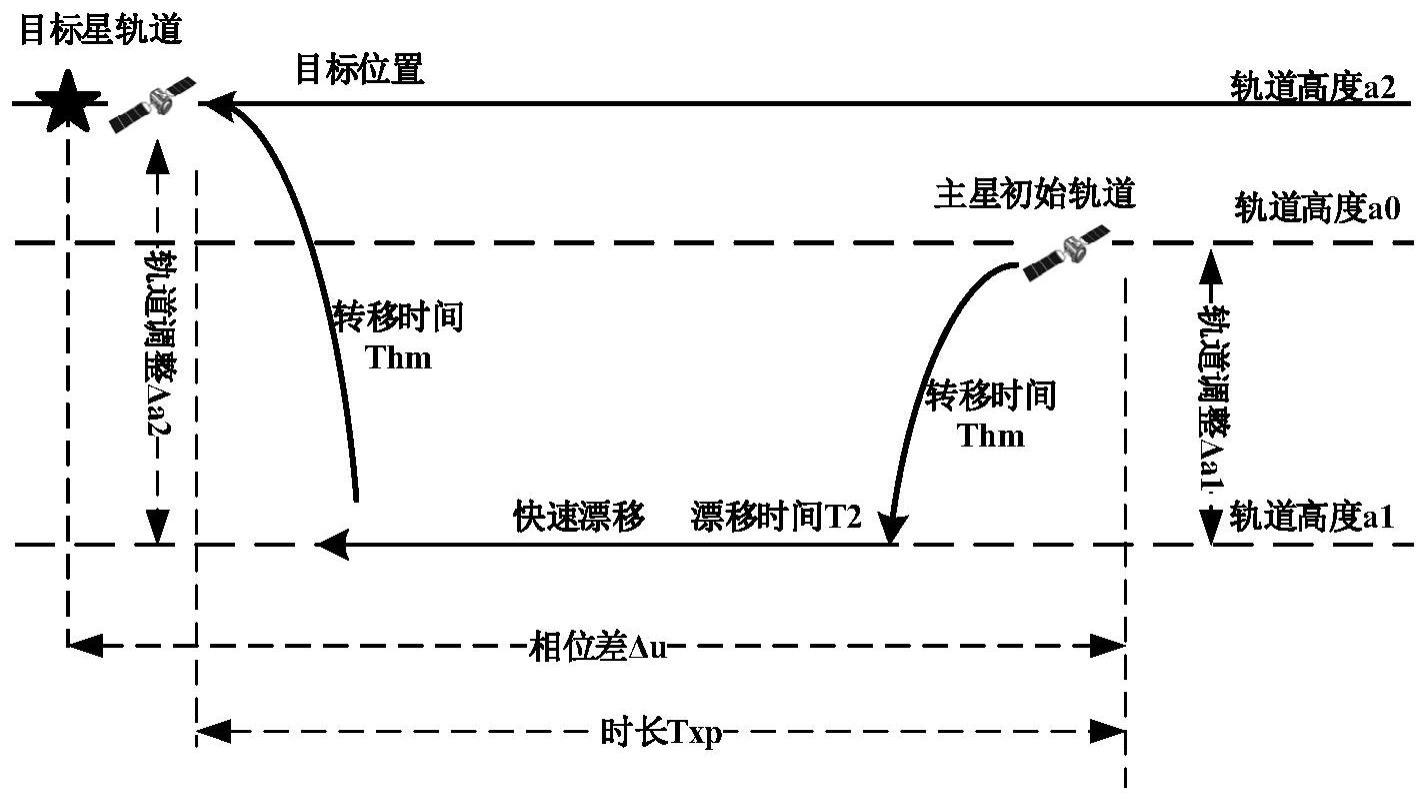
3、步骤一、采用霍曼变轨算法进行主星上自主远程导引;
4、步骤二、采用半长轴修正和闭环轨道控制算法进行远程导引末端修正;
5、步骤三、开启主星上跟瞄单机,捕获跟踪目标星,解算主星与目标星的相对位置速度信息,进行并完成远近程交接班控制;
6、步骤四、开启主星上自主近程导引伴飞控制。
7、进一步地,所述步骤一还包含:
8、根据主星与目标星的总交会时间分配远程导引时间、远近程交班时间、近程导引时间;
9、根据主星与目标星的轨道相位差、高度差、远程导引时间计算漂飞轨道高度和轨控策略。
10、进一步地,所述步骤二还包含:采用闭环轨道控制消除远程导引结束时的位置速度误差。
11、进一步地,所述步骤四还包含:完成远近程交接班后,采用多脉冲最优控制策略,根据交会任务需求,实现主星与目标星相对位置的转移,当主星转移至目标星位置附近,采用闭环轨道控制算法,实现高精度定点伴飞,直至任务结束。
12、进一步地,所述步骤一中霍曼转移的计算公式为:
13、
14、
15、其中δv1、δv2分别指的是霍曼变轨的第一次喷气速度脉冲和第二次喷气速度脉冲,a1是转移轨道高度,ac为主星的轨道高度。
16、进一步地,所述的步骤二中,计算闭环轨道控制策略的公式为u=kkδx;其中,kk为常值增益矩阵,δx为期望相对位置速度值与真实相对位置速度差。
17、进一步地,所述的步骤三中交接班控制,建立z(y轴类似)轴方向控制脉冲的计算公式为:
18、δvz=vz期望-vz
19、其中,a为期望的伴飞椭圆长半轴;
20、z0为当前相对位置z,n为平均轨道角速度。
21、本发明具有以下有益效果:
22、本文提出的方法通过三个阶段星上自主实现了远程、中近程和近程的导引控制,真正实现了自主交会任务的“一键启动”,即只需启动任务时上注相关参数,后续星上全自主进行,减小了卫星在轨的任务执行对地面的依赖程度,提高了实时任务执行的效率。
技术特征:
1.一种非合作目标全自主交会方法,其特征在于,包含以下步骤:
2.如权利要求1所述的非合作目标全自主交会方法,其特征在于,所述步骤一还包含:
3.如权利要求1所述的非合作目标全自主交会方法,其特征在于,所述步骤二还包含:
4.如权利要求1所述的非合作目标全自主交会方法,其特征在于,所述步骤四还包含:
5.如权利要求1所述的非合作目标全自主交会方法,其特征在于,所述步骤一中霍曼转移的计算公式为:
6.如权利要求1所述的非合作目标全自主交会方法,其特征在于,所述的步骤二中,计算闭环轨道控制算法的公式为:u=kkδx
7.如权利要求6所述的非合作目标全自主交会方法,其特征在于,所述的步骤三中交接班控制,建立z轴方向控制脉冲的计算公式为:
技术总结
本发明一种非合作目标全自主交会方法,包含:一、采用霍曼变轨算法进行主星上自主远程导引;二、采用半长轴修正和闭环轨道控制算法进行远程导引末端修正;三、开启主星上跟瞄单机,捕获跟踪目标星,解算主星与目标星的相对位置速度信息,进行并完成远近程交接班控制;四、开启主星上自主近程导引伴飞控制。本发明减小了卫星在轨的任务执行对地面的依赖程度,提高了实时任务执行的效率。
技术研发人员:黄京梅,陈敏花,孟其琛,于皓,刘春阳,丰保民,郭正勇,邵志杰,万海音,王静吉
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!