集群队形结构优化的方法、装置、系统、设备和存储介质与流程
本技术涉及无人系统,尤其涉及一种集群队形结构优化的方法、装置、系统、设备和存储介质。
背景技术:
1、随着信息技术和电子技术的不断进步与发展,无人系统技术已经在农业、工业、军事等领域中得到广泛应用。在进行集群作业时,需要对集群进行编队控制。现有技术中的集群编队的算法通常采用直接控制法,例如在一些水域场景下,通过路径规划可以计算出最优的编队队形结构,从而赋予每一个无人艇执行。但在一些复杂的场景下,例如对实时通信的数据要求高的情况下,直接控制法难以应对复杂多变的动态场景,从而造成在集群编队的结构发生改变时,无法及时优化队形结构,从而造成集群编队的通信效率差等技术问题。
技术实现思路
1、本技术实施例提供一种集群队形结构优化的方法、装置、系统、设备和存储介质,该方案用于解决如何在集群编队的结构发生改变时,及时优化队形结构,从而提高集群编队的通信效率的技术问题。
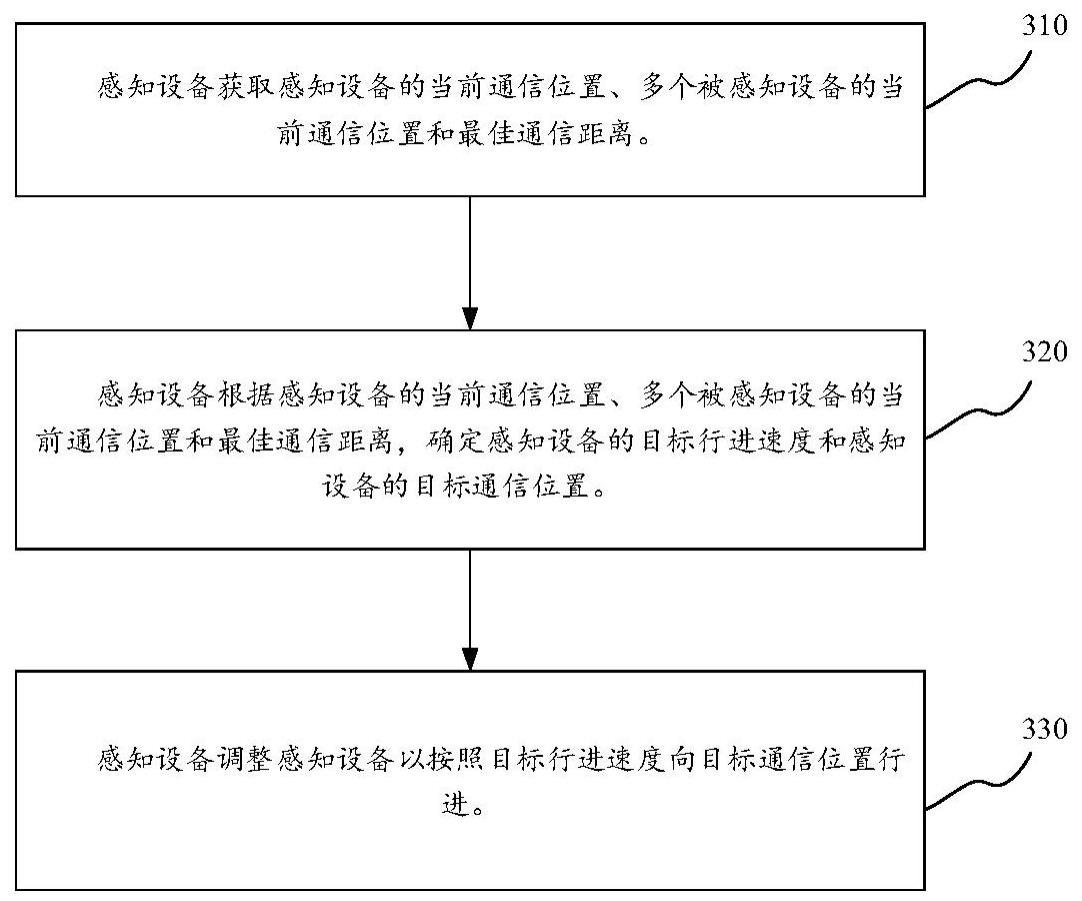
2、第一方面,本技术实施例提供一种集群队形结构优化的方法,该方法包括:获取感知设备的当前通信位置、多个被感知设备的当前通信位置。根据感知设备的当前通信位置、多个被感知设备的当前通信位置和最佳通信距离,确定感知设备的目标行进速度和感知设备的目标通信位置,最佳通信距离为感知设备与任一被感知设备之间通信效率最高的距离,目标通信位置为感知设备与任一被感知设备之间的通信效率最高时所在的位置。按照目标行进速度从当前通信位置向目标通信位置行进。
3、本技术实施例提供一种集群队形结构优化的方法,由于根据获取的感知设备的当前通信位置、多个被感知设备的当前通信位置和最佳通信距离,确定感知设备的目标行进速度和目标通信位置,通过这样的方式,感知设备能够及时获取感知设备和周围被感知设备的位置信息,从而及时确定感知设备的目标行进速度和目标通信位置,由于调整感知设备以按照目标行进速度向目标通信位置行进,这样可以在集群队形的结构发生改变时,及时优化队形结构,从而提高集群编队的通信效率。
4、在本技术的一个可能的实现方式中,根据感知设备的当前通信位置、多个被感知设备的当前通信位置和最佳通信距离,确定感知设备的目标行进速度之前,方法还包括:确定感知设备所能行进的最大行进速度。根据感知设备的当前通信位置、多个被感知设备的当前通信位置和最佳通信距离,确定感知设备的目标行进速度,包括:根据感知设备的当前通信位置,和多个被感知设备的当前通信位置,确定感知设备与多个被感知设备之间的第一距离。分别确定最佳通信距离与多个第一距离之间的差值绝对值。通过对比最佳通信距离与多个第一距离之间的大小,根据多个差值绝对值,确定目标系数,目标系数用于确定目标行进速度。根据目标系数和最大行进速度,确定目标行进速度。
5、在本技术的一个可能的实现方式中,根据感知设备的当前通信位置、多个被感知设备的当前通信位置和最佳通信距离,确定感知设备的目标通信位置,包括:根据感知设备的当前通信位置和多个被感知设备的当前通信位置,分别确定感知设备相对于任一被感知设备的多个角度方向。根据多个角度方向、最佳通信距离和感知设备的当前通信位置,分别确定感知设备相对于任一被感知设备的多个第一通信位置,第一通信位置为感知设备与每一个被感知设备之间通信效率最高的位置。根据多个第一通信位置和感知设备的当前通信位置,确定多个第二距离,第二距离为当前通信位置与第一通信位置之间的延伸距离。将当前通信位置与第一通信位置之间的延伸距离最大的第二距离确定为目标延伸距离。将目标延伸距离所对应的第一通信位置确定为目标通信位置。
6、在本技术的一个可能的实现方式中,按照目标行进速度从当前通信位置向目标通信位置行进之前,方法还包括:判断所述感知设备的当前通信位置与所述目标通信位置之间的行进路径上是否存在障碍物。在检测到行进路径上存在障碍物的情况下,重新确定感知设备向目标通信位置行进的路径。
7、在本技术的一个可能的实现方式中,重新确定感知设备向目标通信位置行进的轨迹,包括:确定所述感知设备与障碍物之间的第三距离。根据第三距离,以障碍物为中心,按照设定方向调整感知设备至第二通信位置,设定方向为顺时针方向或逆时针方向,感知设备从第二通信位置向目标通信位置行进的路径上不存在障碍物。相应的,按照目标行进速度从当前通信位置向目标通信位置行进,包括:按照目标行进速度从第二通信位置向目标通信位置行进。
8、在本技术的一个可能的实现方式中,集群系统中的任一被感知设备可作为感知设备和/或其他被感知设备的感知设备。
9、第二方面,本技术实施例提供一种集群队形结构优化的装置,该集群队形结构优化的装置可以实现第一方面或第一方面的任意可能的实现方式中的方法,因此也能实现第一方面或第一方面任意可能的实现方式中的有益效果。该集群队形结构优化的装置可以为感知设备,也可以支持感知设备实现第一方面或第一方面的任意可能的实现方式中的方法的装置,例如应用于感知设备中的芯片或者控制电路。该集群队形结构优化的装置可以通过软件、硬件、或者通过硬件执行相应的软件实现上述方法。
10、作为一种示例,本技术实施例提供一种集群队形结构优化的装置,该集群队形结构优化的装置为感知设备或者为应用于感知设备中的芯片,该集群队形结构优化的装置包括:获取单元和处理单元,其中,获取单元,用于获取感知设备的当前通信位置、多个被感知设备的当前通信位置。处理单元,用于根据感知设备的当前通信位置、多个被感知设备的当前通信位置和最佳通信距离,确定感知设备的目标行进速度和感知设备的目标通信位置,目标通信位置为感知设备与任一被感知设备之间的通信效率最高时所在的位置,最佳通信距离为感知设备与任一被感知设备之间通信效率最高的距离。处理单元,还用于按照目标行进速度从当前通信位置向目标通信位置行进。
11、在本技术的一个可能的实现方式中,处理单元还用于确定感知设备的最大行进速度。
12、在本技术的一个可能的实现方式中,处理单元还用于根据感知设备的当前通信位置,和多个被感知设备的当前通信位置,确定感知设备与多个被感知设备之间的第一距离,分别确定最佳通信距离与多个第一距离之间的差值绝对值,通过对比最佳通信距离与多个第一距离之间的大小,根据多个差值绝对值,确定目标系数,目标系数用于确定目标行进速度,根据目标系数和最大行进速度,确定目标行进速度。
13、在本技术的一个可能的实现方式中,处理单元还用于根据感知设备的当前通信位置和多个被感知设备的当前通信位置,分别确定感知设备相对于任一被感知设备的多个角度方向,根据多个角度方向、最佳通信距离和感知设备的当前通信位置,分别确定感知设备相对于任一被感知设备的多个第一通信位置,第一通信位置为感知设备与每一个被感知设备之间通信效率最高的位置,根据多个第一通信位置和感知设备的当前通信位置,确定多个第二距离,第二距离为当前通信位置与第一通信位置之间的延伸距离,将当前通信位置与第一通信位置之间的延伸距离最大的第二距离确定为目标延伸距离,将目标延伸距离所对应的第一通信位置确定为目标通信位置。
14、在本技术的一个可能的实现方式中,处理单元还用于判断感知设备的当前通信位置与目标通信位置之间的行进路径上是否存在障碍物,在检测到行进路径上存在障碍物的情况下,重新确定感知设备向目标通信位置行进的路径。
15、在本技术的一个可能的实现方式中,处理单元还用于确定感知设备与障碍物之间的第三距离,根据第三距离,以障碍物为中心,按照设定方向调整感知设备至第二通信位置,设定方向为顺时针方向或逆时针方向,感知设备从第二通信位置向目标通信位置行进的路径上不存在障碍物。
16、第三方面,本技术实施例提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序或指令,当计算机程序或指令在计算机上运行时,使得计算机执行如第一方面至第一方面的任意一种可能的实现方式中描述的一种集群队形结构优化的方法。
17、第四方面,本技术实施例提供一种包括指令的计算机程序产品,当指令在计算机上运行时,使得计算机执行第一方面或第一方面的各种可能的实现方式中描述的一种集群队形结构优化的方法。
18、第五方面,本技术实施例提供一种芯片,该芯片包括处理器和通信接口,通信接口和处理器耦合,处理器用于运行计算机程序或指令,以实现第一方面或第一方面的各种可能的实现方式中所描述的一种集群队形结构优化的方法。通信接口用于与芯片之外的其它模块进行通信。
19、第六方面,本技术实施例提供一种集群队形结构优化的集群系统,该集群系统包括感知设备和多个被感知设备,集群系统是应用于基于无线mesh网络组网的集群系统,感知设备用于执行第一方面或第一方面的各种可能的实现方式中所描述的一种集群队形结构优化的方法。
- 还没有人留言评论。精彩留言会获得点赞!