一种机器人的弹跳控制方法、装置、介质、电子设备与流程
本发明涉及机器人,具体涉及一种机器人的弹跳控制方法、装置、介质、电子设备。
背景技术:
1、机器人的运动控制中,跳跃是非常重要的运动模态,无论是在同一区域的快速移动,还是实现不同区域之间的跨越,仅依靠爬行是不够的,需要依靠跳跃实现机器人空间位置的改变,如此才能让机器人在更复杂的环境中自由运动。现有的足式机器人或弹跳机器人一般进行原地跳跃,或者根据预设的着地角进行前后跳运动控制。
2、在相关技术中,对于机器人的跳跃是通过预设的着地角模拟机器人的运动轨迹,该种方式仅能保证预设的着地角始终符合机器人运动轨迹的应用场景,而在机器人进行连续弹跳的应用场景中,需要应对未知高度地面情况下提前或滞后着地的控制场景,无法保证每次落地的着地角均与预设的着地角相同。并且在相关技术中,若要确定每次落地的着地角,则需要保证模拟的运动轨迹的跟踪精度,该种方式基于现有硬件设备难以实现,因此,相关技术的控制方式无法保证机器人进行连续弹跳的成功率。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中的无法准确模拟机器人进行连续弹跳运动的技术缺陷,从而提供一种机器人的弹跳控制方法、装置、介质、电子设备。
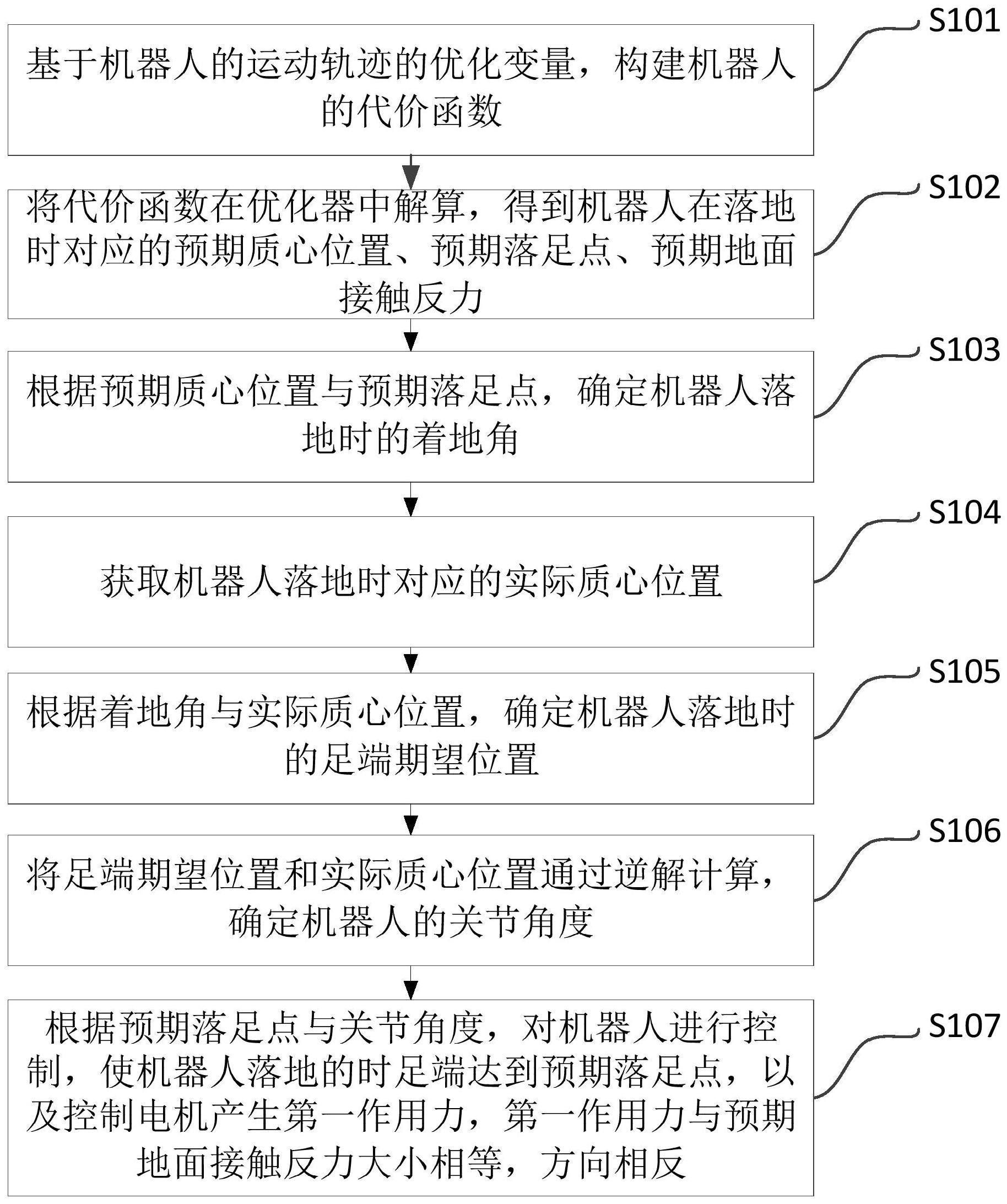
2、第一方面,本发明实施例提供了一种机器人的弹跳控制方法,包括:基于机器人的运动轨迹的优化变量,构建机器人的代价函数,代价函数用于表征机器人在连续跳跃过程中至少一次从跳起时到落地时的运动轨迹;将代价函数在优化器中解算,得到机器人在落地时对应的预期质心位置、预期落足点、预期地面接触反力;根据预期质心位置与预期落足点,确定机器人落地时的着地角;获取机器人落地时对应的实际质心位置;根据着地角与实际质心位置,确定机器人落地时的足端期望位置;将足端期望位置和实际质心位置通过逆解计算,确定机器人的关节角度;根据预期落足点与关节角度,对机器人进行控制,使机器人落地的时足端达到预期落足点,以及控制电机产生第一作用力,第一作用力与预期地面接触反力大小相等,方向相反。
3、结合第一方面,在第一方面的一种可能的实现方式中,机器人的代价函数通过如下公式表达:
4、
5、其中,x,f,pj表示优化变量,k表示预观时域,xi表示当前时刻机器人质心的运动状态,xi,ref表示机器人质心运动状态的参考值,qr表示质心状态的权重,fi表示当前时刻地面的接触反力,qf表示对地面接触反力的权重,pi表示当前时刻的落足点,pi,ref表示期望的落足点,qp表示机器人落足点的权重。
6、结合第一方面,在第一方面的一种可能的实现方式中,将代价函数在优化器中解算,得到机器人在落地时对应的预期质心位置、预期落足点、预期地面接触反力,包括:获取机器人的运动轨迹的约束条件;基于约束条件,通过优化器解算代价函数,得到机器人在落地时对应的预期质心位置、预期落足点、预期地面接触反力。
7、结合第一方面,在第一方面的一种可能的实现方式中,根据预期质心位置与预期落足点,确定机器人落地时的着地角,包括:构建预期质心位置与预期落足点的连线;基于连线,将地面垂直方向与连线的夹角作为机器人落地时的着地角。
8、结合第一方面,在第一方面的一种可能的实现方式中,机器人落地时的着地角通过如下公式表达:
9、
10、其中,α表示着地角,px表示预期落足点的x轴方向位置,pz表示预期落足点的z轴方向位置,rx表示预期质心的x轴方向位置,rz表示预期质心的z轴方向位置。
11、结合第一方面,在第一方面的一种可能的实现方式中,根据着地角与实际质心位置,确定机器人落地时的足端期望位置,包括:获取机器人落地时对应的实际足端位置;确定实际质心位置与实际足端位置的距离;根据距离、着地角与实际质心位置,确定机器人落地时的足端期望位置。
12、结合第一方面,在第一方面的一种可能的实现方式中,机器人落地时的足端期望位置通过如下公式表达:
13、
14、
15、其中,表示期望的足端z轴方向位置,表示期望的足端x轴方向位置,rx′表示实际质心的x轴方向位置,rz′表示实际质心的z轴方向位置,i表示实际质心位置与实际足端位置的距离,α表示着地角。
16、第二方面,本发明实施例提供了一种机器人的弹跳控制装置,包括:代价函数构建单元,用于基于机器人的运动轨迹的优化变量,构建机器人的代价函数,代价函数用于表征机器人在连续跳跃过程中至少一次从跳起时到落地时的运动轨迹;代价函数解算单元,用于将代价函数在优化器中解算,得到机器人在落地时对应的预期质心位置、预期落足点、预期地面接触反力;着地角确定单元,用于根据预期质心位置与预期落足点,确定机器人落地时的着地角;实际质心位置确定单元,用于获取机器人落地时对应的实际质心位置;足端期望位置确定单元,用于根据着地角与实际质心位置,确定机器人落地时的足端期望位置;关节角度确定单元,用于将足端期望位置和实际质心位置通过逆解计算,确定机器人的关节角度;控制单元,用于根据预期落足点与关节角度,对机器人进行控制,使机器人落地的时足端达到预期落足点,以及控制电机产生第一作用力,第一作用力与预期地面接触反力大小相等,方向相反。
17、第三方面,本发明实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令被处理器执行时,实现如第一方面任一实施方式的机器人的弹跳控制方法。
18、第四方面,本发明实施例提供了一种电子设备,包括至少一个处理器;以及与至少一个处理器通信连接的存储器;存储器中存储有可计算机程序指令,当指令被至少一个处理器执行,实现如第一方面任一实施方式的机器人的弹跳控制方法。
19、本发明技术方案,具有如下优点:
20、本发明提供的一种机器人的弹跳控制方法、装置、介质、电子设备,该方法通过机器人的运动轨迹的优化变量构建代价函数,并通过优化器解算代价函数,确定机器人在落地时对应的预期质心位置、预期落足点、预期地面接触反力,进而通过解算得到的预期质心位置与预期落足点确定机器人落地时对应的着地角,从而通过预期落足点与符合着地角的机器人关节角度对机器人进行控制,并控制电机产生与预期地面接触反力大小相等,方向相反的第一作用力,实现机器人的稳定性控制,这一过程中,通过构建代价函数模拟机器人进行连续弹跳的运动轨迹,并通过模拟的运动轨迹确定机器人落地时对应的着地角,从而通过确定的着地角对机器人进行实时控制,使得机器人落地时足端或脚掌达到预期落足点,并使电机产生与预期地面接触反力大小相同,方向相反的力,从而通过第一作用力抵消预期地面接触反力,防止机器人在落地时抖动,提高机器人的稳定性控制,保证机器人可以应对未知高度地面情况下提前或者滞后着地的控制场景,从而增强机器人弹跳运动的鲁棒性,提高机器人连续弹跳的成功率。
技术特征:
1.一种机器人的弹跳控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述机器人的代价函数通过如下公式表达:
3.根据权利要求1所述的方法,其特征在于,所述将所述代价函数在优化器中解算,得到所述机器人在落地时对应的预期质心位置、预期落足点、预期地面接触反力,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述预期质心位置与所述预期落足点,确定所述机器人落地时的着地角,包括:
5.根据权利要求1所述的方法,其特征在于,机器人落地时的着地角通过如下公式表达:
6.根据权利要求1所述的方法,其特征在于,所述根据所述着地角与所述实际质心位置,确定所述机器人落地时的足端期望位置,包括:
7.根据权利要求1所述的方法,其特征在于,所述机器人落地时的足端期望位置通过如下公式表达:
8.一种机器人的弹跳控制装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机指令,所述计算机指令被处理器执行时实现如权利要求1-7中任一项所述的机器人的弹跳控制方法。
10.一种电子设备,其特征在于,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;
技术总结
本发明提供了一种机器人的弹跳控制方法、装置、介质、电子设备,该方法通过构建代价函数模拟机器人进行连续弹跳的运动轨迹,并通过模拟的运动轨迹确定机器人落地时对应的着地角,从而通过确定的着地角对机器人进行实时控制,使得机器人落地时足端或脚掌达到预期落足点,并使电机产生与预期地面接触反力大小相同,方向相反的力,从而通过第一作用力抵消预期地面接触反力,防止机器人在落地时抖动,提高机器人的稳定性控制,保证机器人可以应对未知高度地面情况下提前或者滞后着地的控制场景,从而增强机器人弹跳运动的鲁棒性,提高机器人连续弹跳的成功率。
技术研发人员:冷晓琨,常琳,何治成,吴雨璁,白学林,柯真东,王松,黄贤贤
受保护的技术使用者:乐聚(深圳)机器人技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!