数控机床的实时运动控制系统及方法与流程
本公开涉及数控系统,特别涉及一种数控机床的实时运动控制系统及方法。
背景技术:
1、随着互联网技术与制造技术的高度融合发展,加工装备如数控机床间的互联互通成为了制造业的研究热点,网络化数控系统的概念就是在这一背景下被提出,它致力于解决传统数控系统封闭单机的落后制造现状,实现加工设备与现场管理的数据互通。现场总线技术为网络化数控系统的实现提供了高速数据传输通道,目前数控系统中常用的现场总线主要为工业以太网类型的高速现场总线,例如ethercat、profinet以及sercos等,这些工业以太网总线均是在标准以太网协议的基础上进行改进,但不同的工业以太网总线间并不具备兼容性,而标准以太网总线,即遵循tcp/ip协议的ethernet总线,因为mac层的通讯不确定性导致其只能进行非实时通讯,因此很难直接应用于高实时性性能需求的工业领域。
2、虽然信息技术的变革极大地推动了数控系统的发展,但现有的网络化数控系统架构还存在以下问题:(1)运动控制算法的计算量与数控加工实时性之间存在冲突。在目前的数控系统中,通常由实时操作系统支持的运动控制器执行轨迹光顺、速度规划以及插补等运动控制算法计算,为了保证电机的实时插补位置控制,运动控制算法的计算量会受到一定的限制,进而导致加工精度的损失。针对这一问题,一种可行的解决方案是提高控制器的计算能力,但无疑也会增加设备的使用成本。(2)专用的网络通讯接口阻碍了数控系统的开放性及可拓展性。目前主要数控厂商的数控系统与工控机pc间的网络通讯多采用pci标准拓展网卡或各自系统专用的工业以太网总线,用户开发的工业软件并不具备兼容性,通常只能在单一数控系统中运行。
3、云数控系统是近年来提出的一种新型数控系统,其实现方法是利用云计算等新一代信息技术,在网络化数控系统的基础上引入云端服务器平台,利用云端服务器的强大计算能力实现远程加工管理、加工环节资源调配及工艺过程的数字孪生等云制造的服务模式。由于云端服务器实时性较差,通讯带宽不稳定,部分传统的数控系统难以直接接入云端服务器,边缘计算技术为云数控系统的实现提供了一种解决方案,边缘计算的核心思想是在靠近制造端部署边缘计算节点作为底层数控系统与云端服务器之间的缓冲平台,在边缘计算节点执行工艺数据的预处理以降低数据到云端服务器平台的通讯负担,并保证整体架构的实时性。
4、目前云技术在数控系统中的应用还存在一定的局限性:(1)云端服务器很难保证实时性,目前大多数的云数控系统架构只将数控系统的非实时性任务转移到云端处理,无法充分利用云端服务器的强大计算性能。(2)另外,虽然在靠近数控系统端增设边缘计算节点可以平衡云端服务器的计算能力与底层数控加工的强实时性,还可以在维持原有数控系统架构不变的情况下,将传统的数控系统接入互联网乃至云端服务器中,但目前专用的边缘计算控制器成本较高,且可拓展性有限。
技术实现思路
1、本公开旨在至少解决现有技术中存在的技术问题之一。
2、为此,本公开第一方面提供的数控机床的实时运动控制系统,通过合理调度数控系统的计算资源,克服了运动控制计算量与数控加工实时性之间的冲突,且开放性及可扩展性强。
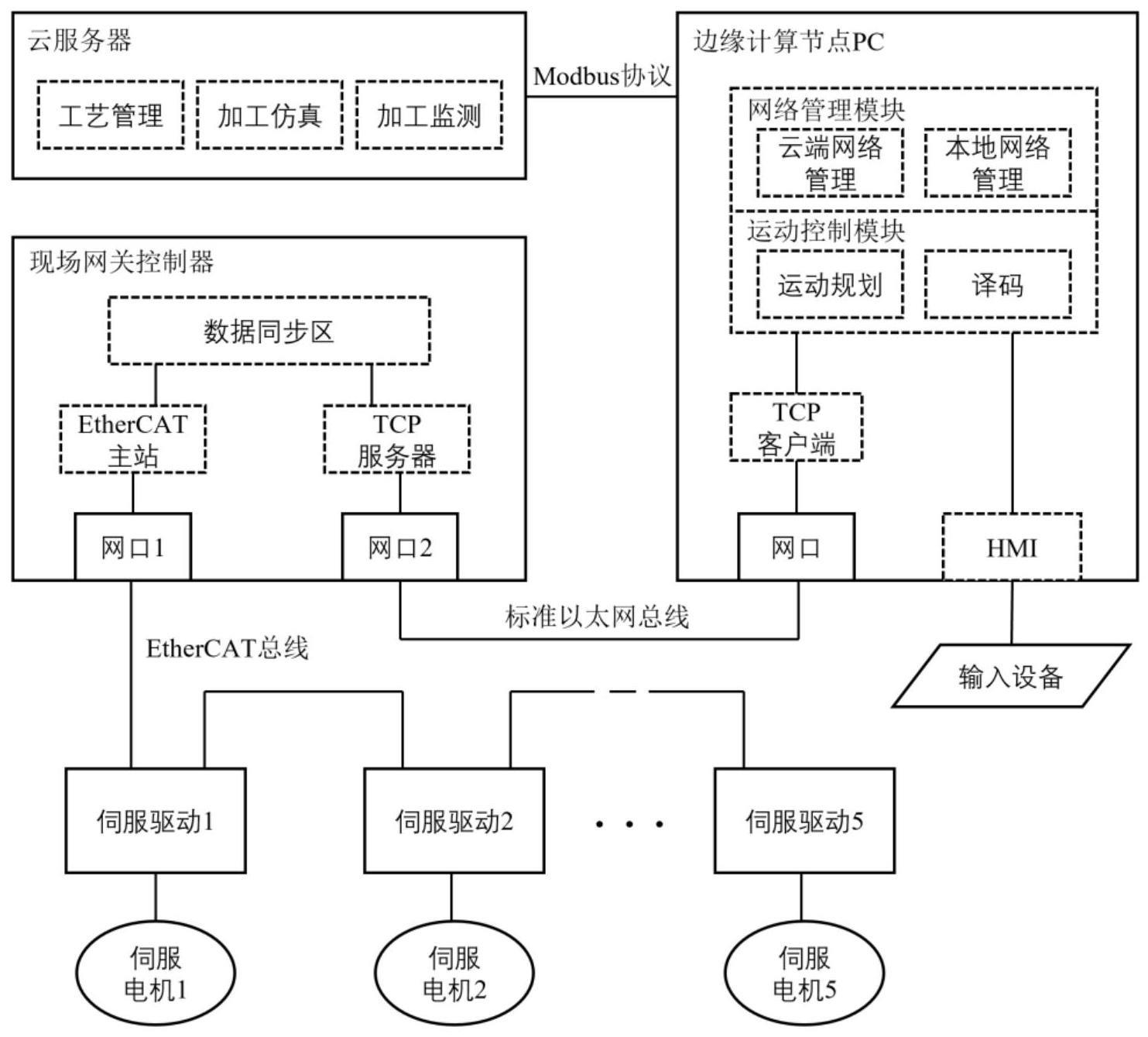
3、本公开第一方面提供的数控机床的实时运动控制系统,包括边缘计算节点和现场网关控制器;
4、所述边缘计算节点,部署在本地pc中,包含运动控制模块和网络管理模块,其中:所述运动控制模块,包括译码子模块和运动规划子模块,所述译码子模块用于对输入的加工g代码进行编译解释,并根据所述运动规划子模块所需的输入数据格式生成加工指令,所述运动规划子模块用于将命令标志位和根据所述加工指令计算生成的插补点数据集生成控制指令集,所述命令标志位为由操作人员在加工前或加工过程中设定的用于底层执行系统的速度倍率调整和紧急停止的指令,所述控制指令集包含多组控制指令,每组所述控制指令中包含若干个控制数据;所述网络管理模块用于根据控制需求建立所述边缘计算节点与待加工机床的所述现场网关控制器之间的非实时通讯,并存储有各现场网关控制器对应的ip地址及通讯端口,所述通讯端口分为数据下发端口和数据上传端口,所述网络管理模块经数据下发端口与所述现场网关控制器进行控制数据的通讯,每次通讯下发一个所述控制指令集;
5、所述现场网关控制器,运行在实时操作系统环境下,包括非实时数据通讯模块、硬实时插补控制模块、数据上传同步区和数据下发同步区,其中:所述非实时数据通讯模块在每个非实时数据通讯的控制周期中,一方面将接收到的所述控制指令集存储到所述数据下发同步区,另一方面将所述数据上传同步区中的多组运动位置数据合并为一个运动位置数据集,经数据上传端口传输至所述网络管理模块;所述硬实时插补控制模块在每个硬实时插补控制周期中,从所述数据下发同步区提取一组所述控制指令,根据其中的命令标志位对插补点数据进行预处理,生成该硬实时插补控制周期内的位置控制数据,并经过工业以太网总线传输至底层执行系统,同时接收底层执行系统返回的一组机床各运动轴的实时运动位置,并将其存储到所述数据上传同步区;所述数据下发同步区的数据写入速率大于其数据读取速率,所述数据上传同步区的数据读取速率大于其数据写入速率。
6、在一些实施例中,部署所述边缘计算节点的本地pc运行在非实时操作系统环境下,与所述现场网关控制器采用tcp/ip协议进行数据传输,其中,所述边缘计算节点作为通讯客户端,根据所述网络管理模块中分配的ip地址与通讯端口向对应的所述现场网关控制器的通讯服务端申请建立通讯连接。
7、在一些实施例中,由所述运动规划子模块生成的控制指令集的每组所述控制指令包含如下信息:
8、x轴伺服电机的插补点指令,表示x轴在每个插补周期内预计到达的位置;
9、y轴伺服电机的插补点指令,表示y轴在每个插补周期内预计到达的位置;
10、z轴伺服电机的插补点指令,表示z轴在每个插补周期内预计到达的位置;
11、a轴伺服电机的插补点指令,表示a轴在每个插补周期内预计到达的位置;
12、c轴伺服电机的插补点指令,表示c轴在每个插补周期内预计到达的位置;
13、倍率选择命令标志位,表示机床各运动轴转速的倍率选择;
14、急停命令标志位,表示机床紧急停止的判断选择;
15、由所述现场网关控制器上传至所述网络管理模块的运动位置数据集的每组所述运动位置数据包含如下信息:
16、x轴伺服电机的实时位置,表示x轴在每个插补周期内实际到达的位置;
17、y轴伺服电机的实时位置,表示y轴在每个插补周期内实际到达的位置;
18、z轴伺服电机的实时位置,表示z轴在每个插补周期内实际到达的位置;
19、a轴伺服电机的实时位置,表示a轴在每个插补周期内实际到达的位置;
20、c轴伺服电机的实时位置,表示c轴在每个插补周期内实际到达的位置。
21、在一些实施例中,部署所述边缘计算节点的本地pc中还设有与所述运动控制模块及所述网络管理模块连接的人机界面。
22、在一些实施例中,所述现场网关控制器实现数据同步的方法包括:
23、步骤a1、建立两个先入先出的数据同步队列,分别作为所述数据下发同步区和所述数据上传同步区,设边缘计算节点下发的一组控制指令所包含控制数据的总个数为n1,现场网关控制器上传的一组运动位置数据的总个数为n2,边缘计算节点与现场网关控制器的非实时通讯周期的理论值和实际值分别为tn和tnt,现场网关控制器与底层执行系统的硬实时数据通讯周期为tr,则单个控制指令集包含的控制指令组数m1与单个运动位置数据集所包含的运动位置数据组数m2为:m1=m2=tn/tr,数据下发同步区的存储大小d1以及在边缘计算节点与现场网关控制器的数据下发过程中的单次通讯数据量s1为:d1=s1=in1m1,数据上传同步区的存储大小d2以及在边缘计算节点与现场网关控制器的数据上传过程中的单次通讯数据量s2为:d2=s2=in2m2;
24、基于tcp通讯的非实时性,设tn∈(tmin,tmax-δt),tnt∈(tn-tr,tn),其中,tmin为边缘计算节点与现场网关控制器的非实时通讯周期的最小值,根据边缘计算节点一次下发的数据至少要满足硬实时插补控制模块进行2次插补控制的数据需求,设tmin取为2tr;δt为tcp的最大通讯时延,tmax为边缘计算节点与现场网关控制器的非实时通讯周期的最大值,根据单次通讯的数据量不超过tcp通讯的最大传输单元的要求设定tmax,计算公式如下:
25、
26、步骤a2、当所述边缘计算节点向所述现场网关控制器下发一个控制指令集时,所述非实时数据通讯模块检测所述数据下发同步区是否有空余,若存在空余则按照数据写入速率v1依次写入下发的所述控制指令集中的m1组控制指令,每次写入一组控制指令,直至数据下发同步区已写满,则堵塞边缘计算节点和现场网关控制器的数据下发端口直到所述硬实时插补控制模块按照数据读取速率v11提取数据下发同步区中的一组控制指令集,硬实时插补控制模块对该提取的一组控制指令进行预处理后生成一组位置控制数据并经过工业以太网总线传输至底层执行系统;其中,数据下发同步区的数据写入速率v1和数据读取速率v11分别为:
27、
28、
29、步骤a3、在加工过程中,底层执行系统的伺服驱动器通过工业以太网总线实时反馈伺服电机的位置信息到现场网关控制器的硬实时插补控制模块,硬实时插补控制模块将每个插补周期中各伺服电机的位置信息按照运动位置数据的格式整理为一组运动位置数据并检测数据上传同步区是否有空余,若存在空余,则将该组运动位置数据按照数据写入速率v22放入数据上传同步区中,现场网关控制器的非实时数据通讯模块检测数据上传同步区是否写入数据,若不存在写入数据,则等待直至检测到数据上传同步区写入数据,若存在写入数据,则按照数据读取速率v2读取一组运动位置数据,当读取的组数达到了运动位置数据集的规模n2,则将读取的多组运动位置数据合并为一个运动位置数据集经数据上传端口传输至所述边缘计算节点的网络管理模块;其中,数据上传同步区的数据写入速率v22和数据读取速率v2分别为:
30、
31、
32、在一些实施例中,所述硬实时插补控制模块对所述插补点数据进行的预处理包括:
33、所述硬实时插补控制模块从数据下发同步区中提取一组控制指令,读取其中的命令标志位;若根据所述命令标志位判定执行紧急停止,则运行预先设定的电机停止指令;若根据所述命令标志位判定执行速度倍率调整,则根据速度倍率选择标志位的数据将各运动轴的插补点数值乘以相应速度倍率。
34、在一些实施例中,所述的实时运动控制系统还包括与所述边缘计算节点进行通讯的云端服务器,所述云端服务器包括加工工艺管理模块、加工仿真模块和加工过程检测模块;
35、所述加工工艺管理模块,支持输入加工g代码或调用云端服务器中存储的加工g代码;
36、所述加工仿真模块,用于在加工前对加工g代码进行仿真分析,根据设定的运动规划算法生成底层执行系统的运动仿真模型,包含运动过程的速度和加速度在内仿真信息,并得到控制底层执行系统的插补点数据集;
37、所述加工过程检测模块,用于根据所述边缘计算节点传输的底层执行系统的运动位置数据集在对应的运动仿真模型中显示加工运动过程。
38、在一些实施例中,所述云端服务器与所述边缘计算节点通过modbus协议进行通讯。
39、本公开第二方面提供的数控机床的实时运动控制方法,包括:
40、s1、在边缘计算节点中输入加工g代码以及用于控制速度倍率调整和紧急停止的命令标志位,并选择待加工机床,调用所述边缘计算节点的计算资源进行译码解析、轨迹光顺、速度规划及插补计算生成用于控制底层执行系统的插补点数据集,并由所述插补点数据集和所述命令标志位生成控制指令集,所述控制指令集内含有若干组控制指令,每组控制指令由多个控制数据组成;
41、s2、所述边缘计算节点根据选择的待加工机床对应的ip地址及端口号向对应的现场网关控制器申请建立非实时通讯,具体地,边缘计算节点通过数据下发端口向现场网关控制器发送一个所述控制指令集;
42、s3、现场网关控制器接收到所述控制指令集后将其存储到现场网关控制器内的数据下发同步区中,按照硬实时插补控制周期依次从数据下发同步区中提取每组控制指令,并对每组控制指令进行预处理生成最终的位置控制数据,经实时通讯端口下发至底层执行系统,所述数据下发同步区的数据写入速率大于其数据读取速率;
43、s4、底层执行系统的伺服驱动器在与现场网关控制器的一次通讯周期中接收该周期的位置控制数据,以此控制伺服电机的运动并将对应的伺服电机实时运动位置经实时通讯端口上传至现场网关控制器内的数据上传同步区中,现场网关控制器通过数据上传同步区的缓冲将存储的设定组数的实时运动位置数据构成运动位置数据集后经数据上传端口传输至边缘计算节点,所述数据上传同步区的数据读取速率大于其数据写入速率。
44、在一些实施例中,所述的实时运动控制方法还包括:
45、通过modbus协议建立所述边缘计算节点与云端服务器之间的通讯,所述云端服务器用于加工工艺管理、加工仿真和加工过程检测;其中,加工工艺管理用于实现输入加工g代码或调用云端服务器中存储的加工g代码;加工仿真用于在加工前对加工g代码进行仿真分析,根据设定的运动规划算法生成底层执行系统的运动仿真模型,包含运动过程的速度和加速度在内的仿真信息,并得到控制底层执行系统的插补点数据集;加工过程检测用于根据边缘计算节点上传的底层执行系统的运动位置数据集在对应的仿真模型中显示加工运动过程。
46、本公开具有以下特点及有益效果:
47、本公开提出的数控机床的实时运动控制系统及方法将边缘计算节点部署在本地pc,便于对运动控制算法进行优化的同时减少对专用边缘计算硬件的依赖,从而减少了系统的整体使用成本。且边缘计算节点与网关控制器的通讯采用标准的以太网协议,不需要专用的网络通讯设备,一个边缘计算节点pc可以同时控制多个网关控制器,使数控系统具备良好的开放性、拓展性以及可互换性。此外,本公开提出的数控机实时运动控制系统具备与云端服务器进行通讯的能力,能够基于边云协同方案合理调度云-边-端的计算资源,可以直接在本地pc或云端服务器进行数控加工的运动轨迹及插补点生成,从而大幅降低底层运动控制器的计算量,减少对其计算性能的需求。且通过现场网关控制器中数据同步区的设计使系统可以在具有较强计算能力的同时兼顾了底层运动控制强实时性的需求,实现了云-边-端协同的数控加工运动控制,为智能数控系统提出了一种可行的实现方案。
- 还没有人留言评论。精彩留言会获得点赞!