基于运用镜反射光电传感器的OHT小车正位控制的制作方法
本发明涉及小车正位控制,具体为基于运用镜反射光电传感器的oht小车正位控制。
背景技术:
1、现阶段oht(overhead hoist transport,空中走形式无人搬运车)的小车在行至port(出入口)位置正位时一般是靠plc的伺服电机或者barcode reader(条码扫描器)方式进行正位判断及控制;若直接采用plc的伺服电机控制有以下缺点:需要plc工程师人工反复测试加速度与减速度等值,驱动伺服电机使小车停止在正确的刹停位;此种做法无防呆,如果小车因为一些客观因素导致停止位置与正确的刹停位有偏差,便会无法进行相关校正或者报警,进一步导致oht上的foup(晶圆盒)无法正确的进入port中,可能会造成碰撞从而损坏设备。
技术实现思路
1、本发明的目的在于提供基于运用镜反射光电传感器的oht小车正位控制,具备可进行正位防呆的优点,解决了直接采用plc的伺服电机控制无防呆,如果小车因为一些客观因素导致停止位置与正确的刹停位有偏差,便会无法进行相关校正或者报警,进一步导致oht上的晶圆盒无法正确的进入port中,可能会造成碰撞从而损坏设备的问题。
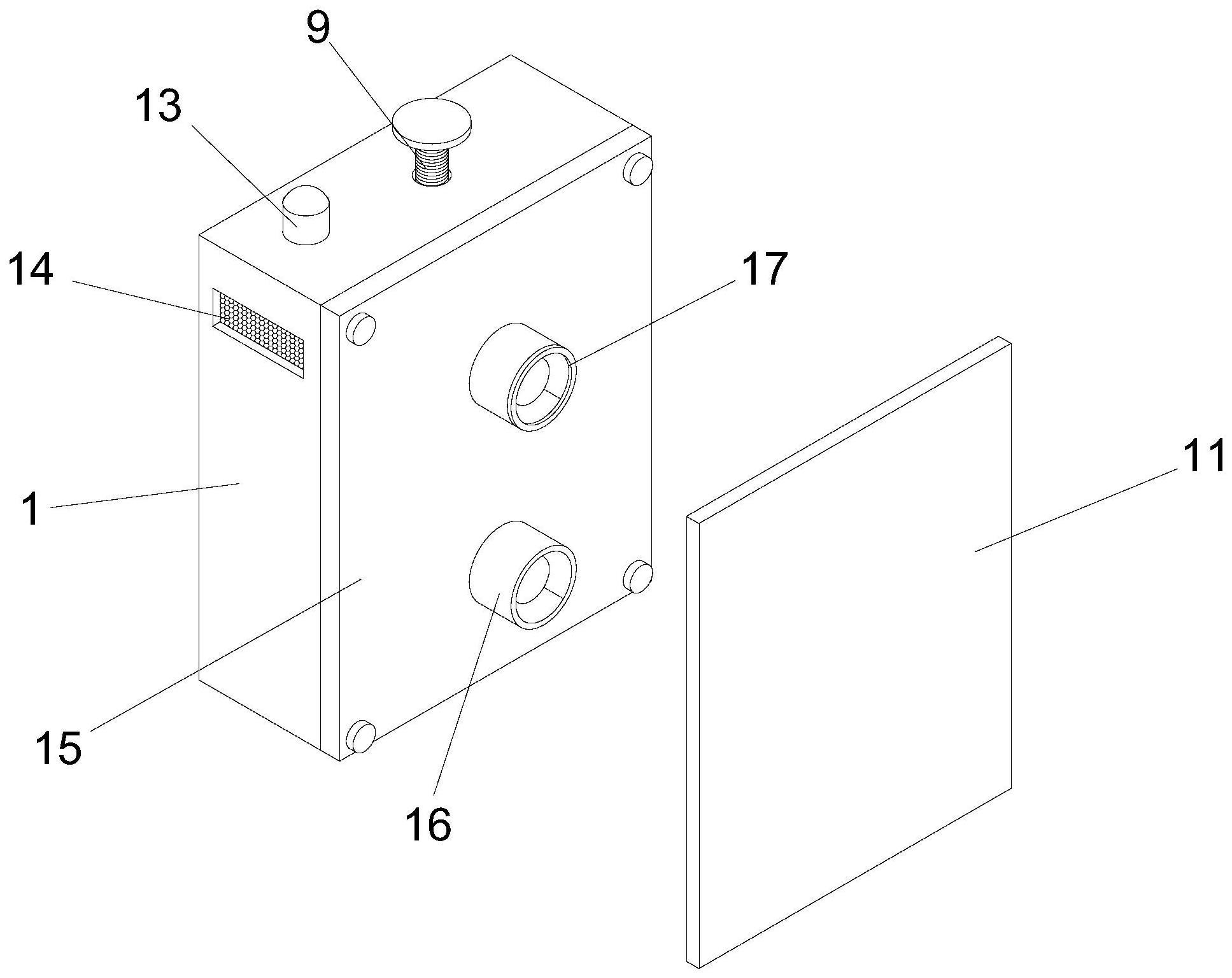
2、为实现上述目的,本发明提供如下技术方案:基于运用镜反射光电传感器的oht小车正位控制,包括防护壳、反射板和plc控制器,所述防护壳内腔的底部固定连接有塑胶座,所述塑胶座的顶部设置有镜反射传感器,所述镜反射传感器右侧的上端设置有发射端,所述镜反射传感器右侧的下端设置有接收端,所述防护壳内腔的正面和背面均固定连接有弹簧,所述弹簧远离防护壳内壁的一端固定连接有塑胶板,所述防护壳的顶部开设有螺纹槽,所述螺纹槽的内腔螺纹连接有螺纹杆,所述螺纹杆的底部贯穿螺纹槽并延伸至防护壳的内腔,且通过轴承活动连接有塑胶架,所述塑胶架远离螺纹杆的一侧与镜反射传感器接触。
3、优选的,所述防护壳顶部的左侧固定连接有报警器,所述报警器的输入端与plc控制器的输出端电性连接。
4、优选的,所述防护壳的正面开设有通风槽,所述通风槽的内腔固定连接有防尘网。
5、优选的,所述防护壳的右侧设置有封闭板,所述封闭板位于防护壳的右侧且通过螺栓与防护壳螺纹连接。
6、优选的,所述封闭板右侧的上端和下端均连通有防护筒,所述发射端和接收端均延伸至防护筒的内腔并与防护筒的内腔活动连接。
7、优选的,上端所述防护筒的右侧设置有偏振片,且偏振片位于防护筒的右侧且通过粘接剂粘接。
8、优选的,所述塑胶座的顶部开设有放置槽,所述镜反射传感器的底部延伸至放置槽的内腔并与放置槽的内腔活动连接。
9、优选的,所述塑胶架的正面和背面均固定连接有限位板,所述防护壳内腔的正面和背面均开设有限位槽,所述限位板远离塑胶架的一端延伸至限位槽的内腔并与限位槽的内腔滑动连接。
10、优选的,所述塑胶板远离弹簧的一侧固定连接有防护软垫,所述防护软垫远离塑胶板的一侧与镜反射传感器接触。
11、优选的,所述接收端的输出端与镜反射传感器的输入端电性连接,所述镜反射传感器的输出端与plc控制器的输入端电性连接,所述plc控制器的输出端与小车的输入端电性连接,所述镜反射传感器的输出端与发射端的输入端电性连接。
12、与现有技术相比,本发明的有益效果如下:
13、本发明通过镜反射传感器、发射端、接收端、反射板、plc控制器的配合,来对现阶段的位置进行相关判断,可在plc控制器中运用镜反射传感器的反馈结果进行相关控制,镜反射传感器使发射端发出射光,使光照射在反射板的表面,反射板对光进行反射,以接收端是否能接收到光来判定,如果未接收到光,即刹停位必然是不准确的,则无法进行下一步的load&unload装卸工作,此时plc控制器通过判断后,立马停止小车一切操作,并进行报警,从而避免碰撞等情况的发生,通过弹簧、塑胶板、螺纹槽、螺纹杆和塑胶架的配合,弹簧的复位弹力带动塑胶板向一侧运动对镜反射传感器夹紧,螺纹杆在螺纹槽内腔转动带动塑胶架向下运动对镜反射传感器进行压紧,进而可对镜反射传感器进行定位,确保了镜反射传感器运行的稳定性,且避免受到外界物体袭击时,镜反射传感器与防护壳内壁碰撞产生损坏的情况,解决了直接采用plc的伺服电机控制无防呆,如果小车因为一些客观因素导致停止位置与正确的刹停位有偏差,便会无法进行相关校正或者报警,进一步导致oht上的晶圆盒无法正确的进入port中,可能会造成碰撞从而损坏设备的问题。
技术特征:
1.基于运用镜反射光电传感器的oht小车正位控制,包括防护壳(1)、反射板(11)和plc控制器(12),其特征在于:所述防护壳(1)内腔的底部固定连接有塑胶座(2),所述塑胶座(2)的顶部设置有镜反射传感器(3),所述镜反射传感器(3)右侧的上端设置有发射端(4),所述镜反射传感器(3)右侧的下端设置有接收端(5),所述防护壳(1)内腔的正面和背面均固定连接有弹簧(6),所述弹簧(6)远离防护壳(1)内壁的一端固定连接有塑胶板(7),所述防护壳(1)的顶部开设有螺纹槽(8),所述螺纹槽(8)的内腔螺纹连接有螺纹杆(9),所述螺纹杆(9)的底部贯穿螺纹槽(8)并延伸至防护壳(1)的内腔,且通过轴承活动连接有塑胶架(10),所述塑胶架(10)远离螺纹杆(9)的一侧与镜反射传感器(3)接触。
2.根据权利要求1所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述防护壳(1)顶部的左侧固定连接有报警器(13),所述报警器(13)的输入端与plc控制器(12)的输出端电性连接。
3.根据权利要求1所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述防护壳(1)的正面开设有通风槽(14),所述通风槽(14)的内腔固定连接有防尘网。
4.根据权利要求1所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述防护壳(1)的右侧设置有封闭板(15),所述封闭板(15)位于防护壳(1)的右侧且通过螺栓与防护壳(1)螺纹连接。
5.根据权利要求4所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述封闭板(15)右侧的上端和下端均连通有防护筒(16),所述发射端(4)和接收端(5)均延伸至防护筒(16)的内腔并与防护筒(16)的内腔活动连接。
6.根据权利要求5所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:上端所述防护筒(16)的右侧设置有偏振片(17),且偏振片(17)位于防护筒(16)的右侧且通过粘接剂粘接。
7.根据权利要求1所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述塑胶座(2)的顶部开设有放置槽(18),所述镜反射传感器(3)的底部延伸至放置槽(18)的内腔并与放置槽(18)的内腔活动连接。
8.根据权利要求1所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述塑胶架(10)的正面和背面均固定连接有限位板(19),所述防护壳(1)内腔的正面和背面均开设有限位槽(20),所述限位板(19)远离塑胶架(10)的一端延伸至限位槽(20)的内腔并与限位槽(20)的内腔滑动连接。
9.根据权利要求1所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述塑胶板(7)远离弹簧(6)的一侧固定连接有防护软垫(21),所述防护软垫(21)远离塑胶板(7)的一侧与镜反射传感器(3)接触。
10.根据权利要求1所述的基于运用镜反射光电传感器的oht小车正位控制,其特征在于:所述接收端(5)的输出端与镜反射传感器(3)的输入端电性连接,所述镜反射传感器(3)的输出端与plc控制器(12)的输入端电性连接,所述plc控制器(12)的输出端与小车的输入端电性连接,所述镜反射传感器(3)的输出端与发射端(4)的输入端电性连接。
技术总结
本发明公开了基于运用镜反射光电传感器的OHT小车正位控制,包括防护壳、反射板和PLC控制器,所述防护壳内腔的底部固定连接有塑胶座,所述塑胶座的顶部设置有镜反射传感器。本发明通过镜反射传感器、发射端、接收端、反射板、PLC控制器的配合,来对现阶段的位置进行相关判断,可在PLC控制器中运用镜反射传感器的反馈结果进行相关控制,镜反射传感器使发射端发出射光,使光照射在反射板的表面,反射板对光进行反射,以接收端是否能接收到光来判定,解决了如果小车因为一些客观因素导致停止位置与正确的刹停位有偏差,便会无法进行相关校正或者报警,进一步导致OHT上的晶圆盒无法正确的进入PORT中,造成碰撞从而损坏设备的问题。
技术研发人员:吴智宇,李帅
受保护的技术使用者:南京华易泰电子科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!