基于非线性模型预测控制的移动机器人路径跟踪控制方法
本发明涉及机器人,特别是涉及基于非线性模型预测控制的移动机器人路径跟踪控制方法。
背景技术:
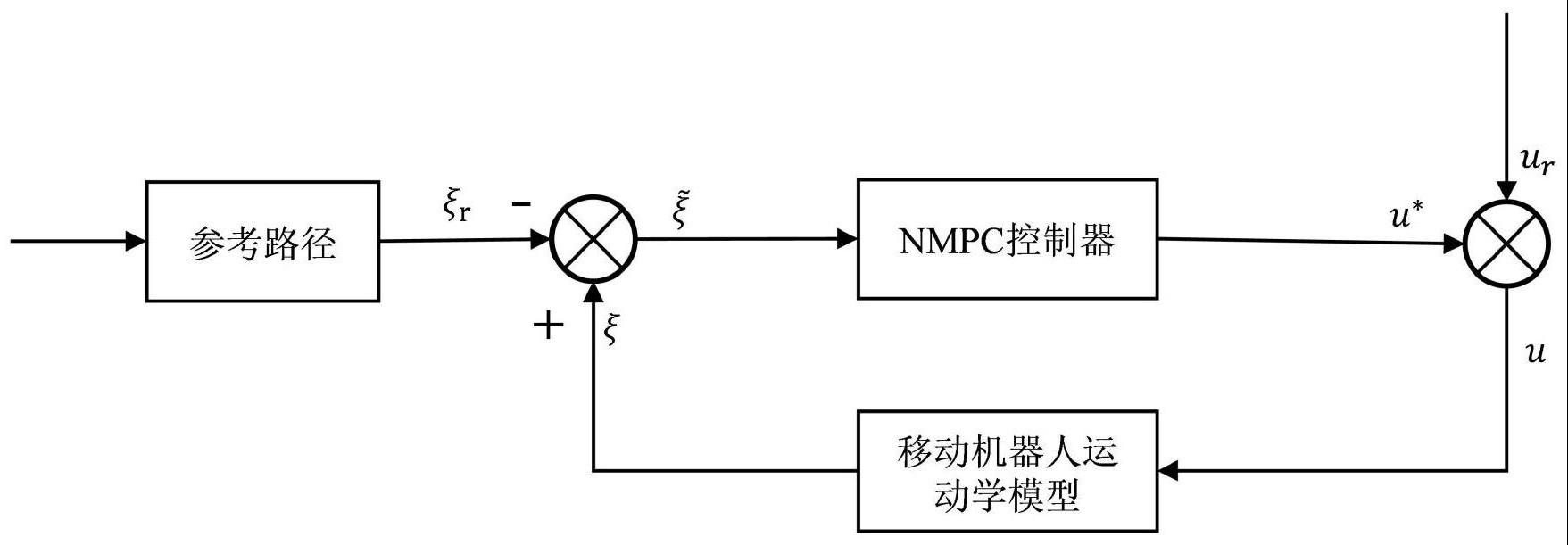
1、移动机器人导航过程中,路径跟踪控制主要解决的是移动机器人能够以一定的精度按照已经规划好的路径进行跟踪。对于跟踪控制器的设计,它的主要目的在于根据给定的参考路径与实际运动路径得到偏差,并在控制器中求解得到系统的输出控制量从而控制移动机器人按照给定路径继续行驶。
2、在移动机器人的路径跟踪控制方面,常用的方法有p i d控制、线性二次型(lqr)控制以及模型预测控制(mpc)控制器。传统的p i d控制由于其结构简单,控制简单易行,但是其不考虑移动机器人的运动模型,使得控制参数需要反复调试才能达到一个较好的效果。当系统模型为非线性模型且环境中存在较多不确定扰动时,模型预测控制比其他方法更加适用于对路径的精确跟踪。模型预测控制结合了系统的运动模型、优化算法和反馈校正。在具体的实现过程中,首先对移动机器人的运动学模型进行线性化和离散化处理得到系统的预测模型,预测模型可以在每个预测域内预测出机器人未来的状态和输出,然后以最小化实际路径与给定路径之间的误差为目标,转换成一个最优化问题,通过在最优化问题中设置约束条件来限制解的可行性。最后根据优化得到的控制输入来对机器人进行控制。在此过程中,使用反馈控制进行修正,确保机器人始终按照给定路径运动。
技术实现思路
1、本发明的目的在于提供基于非线性模型预测控制的移动机器人路径跟踪控制方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、基于非线性模型预测控制的移动机器人路径跟踪控制方法,包含以下步骤:
4、步骤1、建立移动机器人的非线性运动学模型;
5、步骤2、采用二阶龙格库塔方法分别对移动机器人非线性运动学模型进行离散化处理;
6、步骤3、根据步骤2得到的预测模型,设计目标函数并构建约束条件,对系统的状态变量和控制变量进行约束;
7、步骤4、根据步骤3设计的目标函数以及构建的约束条件,通过求解得到系统的最优控制增量序列,在每个周期内计算一个转角增量序列,但是只使用第一个增量作为实际的控制输入并作用到系统中,得到的最终的控制指令表达式。
8、作为本发明的进一步技术方案:步骤1具体是:
9、对移动机器人做出如下理想化假设:
10、(1)移动机器人的几何中心与重心重合,机器人的质量分布均匀;
11、(2)移动机器人整体刚性;
12、(3)移动机器人在平面内运动,忽略侧倾运动;
13、(4)移动机器人在整个过程平稳运行;
14、在以上理想化假设的情况下,建立起移动机器人的非线性运动学模型:
15、
16、其中,x,y为移动机器人的横纵坐标,为移动机器人的航向角,v为移动机器人后轴中心速度,l为移动机器人的轴距,δf为移动机器人的前轮转角。
17、作为本发明的进一步技术方案:二阶龙格库塔法的表达形式为:
18、
19、之后,定义系统的离散周期为t,预测时域为np,控制时域为nc,通过二阶龙格库塔分别对运动学模型中的横、纵坐标和航向角进行离散化处理,可以得到:
20、
21、
22、
23、上式中,i=0,1,2…np-1,在已知机器人的初始状态和初始前轮转向角δ0的情况下,可以在系统的每个采样时刻都能获得机器人的当前状态,将一组前轮转角控制输入序列代入式(4-25)并进行迭代可以得到移动机器人的航向角在每个周期内的数值解序列同样的将得到的机器人航向角数值解序列代入式(4-23)、式(4-24)并进行迭代可以得到移动机器人的横纵坐标(xi,yi)的数值解序列,未来时刻的预测输出方程以矩阵的形式表示如下:
24、
25、
26、
27、其中
28、作为本发明的进一步技术方案:目标函数的约束条件如下:
29、δδminδδiδδmax (10)
30、δminδiδmax (11)
31、式中,i的取值为i=1,2,…np,δδmin和δδmax分别移动机器人前轮转向角增量的最小值和最大值,δmin和δmax为机器人前轮转角的最小值和最大值。
32、作为本发明的进一步技术方案:步骤4具体是:根据步骤3设计的目标函数以及构建的约束条件,通过求解可以得到系统的最优控制增量序列为:
33、
34、在每个周期内计算一个转角增量序列,但是只使用第一个增量作为实际的控制输入并作用到系统中,得到的最终的控制指令表达式为:u=δ0+δδ1(13)。
35、与现有技术相比,本发明的有益效果是:
36、本发明提供一种基于非线性模型预测的移动机器人路径跟踪控制方法,通过采用二阶龙格库塔方法直接对非线性运动学模型进行离散化处理,保证非线性模型的精度,实现了移动机器人对给定路径的精确跟踪。相比于传统的对非线性模型先进行线性化操作,之后再进行离散化处理,该方法省去了线性化操作,这样可以使得非线性模型的精度更高,从而提高移动机器人的跟踪精度。
技术特征:
1.基于非线性模型预测控制的移动机器人路径跟踪控制方法,其特征在于,包含以下步骤:
2.根据权利要求1的基于非线性模型预测控制的移动机器人路径跟踪控制方法,其特征在于,步骤1具体是:
3.根据权利要求1的基于非线性模型预测控制的移动机器人路径跟踪控制方法,其特征在于,二阶龙格库塔法的表达形式为:
4.根据权利要求1的基于非线性模型预测控制的移动机器人路径跟踪控制方法,其特征在于,目标函数的约束条件如下:
5.根据权利要求1的基于非线性模型预测控制的移动机器人路径跟踪控制方法,其特征在于,步骤4具体是:根据步骤3设计的目标函数以及构建的约束条件,通过求解可以得到系统的最优控制增量序列为:
技术总结
本发明公开了基于非线性模型预测控制的移动机器人路径跟踪控制方法,包含以下步骤:步骤1、建立移动机器人的非线性运动学模型;步骤2、采用二阶龙格库塔方法分别对移动机器人非线性运动学模型进行离散化处理;步骤3、根据步骤2得到的预测模型,设计目标函数并构建约束条件,对系统的状态变量和控制变量进行约束;本发明提供一种基于非线性模型预测的移动机器人路径跟踪控制方法,使移动机器人系统在存在模型不确定性以及外部随机扰动的情况下,能够以较高精度稳定地跟踪到预先给定的参考路径,保证跟踪过程的稳定性。
技术研发人员:李宏
受保护的技术使用者:燕山大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!