一种应用四足机器人的巡检方法和系统与流程
本发明涉及机器人巡检,尤其涉及一种应用四足机器人的巡检方法和系统。
背景技术:
1、随着电力设备状态检修的不断深化,设备巡检间隔、检修时机、检修方式等策略的不断优化,特别是配电系统由于设备种类繁杂、数量巨大,配电自动化数据对配电系统供电可靠性的影响不可忽略,但传统的人工巡检方式会存在由于操作人员经验不足、水平不一造成检测方法不正常、漏检、重复检测效率低下和检测过程人员安全隐患。
2、现有技术中,主要是通过四足机器人来替代传统的人工巡检方式,但在巡检过程中,由于检修和施工等人类活动影响了获取巡检信息的完整性,导致四足机器人获取巡检信息的准确率较低。
技术实现思路
1、本发明提供了一种应用四足机器人的巡检方法和系统,解决了现有在巡检过程中,由于检修和施工等人类活动影响了获取巡检信息的完整性,导致四足机器人获取巡检信息的准确性较低的技术问题。
2、本发明第一方面提供的一种应用四足机器人的巡检方法,包括:
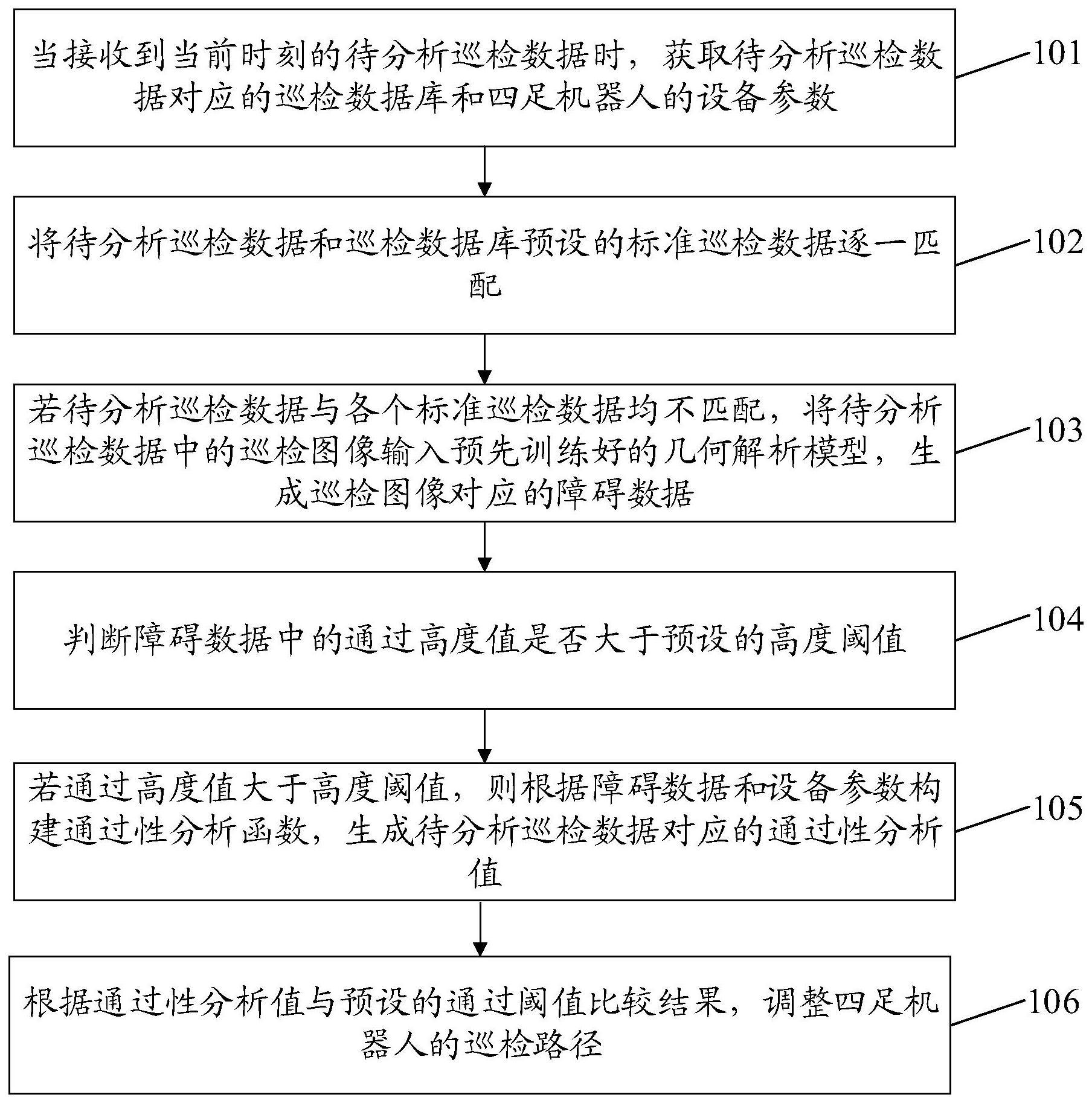
3、当接收到当前时刻的待分析巡检数据时,获取所述待分析巡检数据对应的巡检数据库和四足机器人的设备参数;
4、将所述待分析巡检数据和所述巡检数据库预设的标准巡检数据逐一匹配;
5、若所述待分析巡检数据与各个所述标准巡检数据均不匹配,将所述待分析巡检数据中的巡检图像输入预先训练好的几何解析模型,生成所述巡检图像对应的障碍数据;
6、判断所述障碍数据中的通过高度值是否大于预设的高度阈值;
7、若所述通过高度值大于所述高度阈值,则根据所述障碍数据和所述设备参数构建通过性分析函数,生成所述待分析巡检数据对应的通过性分析值;
8、根据所述通过性分析值与预设的通过阈值比较结果,调整所述四足机器人的巡检路径。
9、可选的,所述若所述待分析巡检数据与各个所述标准巡检数据均不匹配,将所述待分析巡检数据中的巡检图像输入预先训练好的几何解析模型,生成所述巡检图像对应的障碍数据的步骤,包括:
10、若所述待分析巡检数据与各个所述标准巡检数据均不匹配,则将所述待分析巡检数据中巡检图像输入预先训练好的几何解析模型,生成巡检图像对应的通过宽度值、通过高度值和相邻片段角度值;其中,所述几何解析模型是用于对输入的巡检图像进行分析输出对应的通过宽度值、通过高度值和相邻片段角度值;
11、采用所述通过宽度值、所述通过高度值和所述相邻片段角度值作为障碍数据。
12、可选的,所述通过性分析函数具体为:
13、
14、其中,t通过性分析值,l2宽度值,l1长度值,α相邻片段角度值,l通过宽度值,ε相邻片段角度补偿系数。
15、可选的,所述根据所述通过性分析值与预设的通过阈值比较结果,调整所述四足机器人的巡检路径的步骤,包括:
16、判断所述通过性分析值是否大于预设的通过阈值;
17、若所述通过性分析值大于所述通过阈值,则判定所述四足机器人可以通过;
18、若所述通过性分析值小于或等于所述通过阈值,则选取与当前巡检路径相邻的目标路径作为新的巡检路径;
19、跳转执行所述当接收到当前时刻的待分析巡检数据时,获取所述待分析巡检数据对应的巡检数据库和四足机器人的设备参数的步骤。
20、可选的,在所述当接收到当前时刻的待分析巡检数据时,获取所述待分析巡检数据对应的巡检数据库和四足机器人的设备参数的步骤之前,还包括:
21、在预先建立的巡检地图上设置若干个采集点、以及所述采集点对应四足机器人的执行指令;
22、按照预设的巡检路径依次连接各个所述采集点,生成巡检路网;
23、选取所述巡检路网中各个所述采集点连接形成的最短路径作为目标路径;
24、控制所述四足机器人在所述目标路径上执行所述执行指令,并实时获取待分析巡检数据。
25、本发明第二方面提供的一种应用四足机器人的巡检系统,包括:
26、巡检信息获取模块,用于当接收到当前时刻的待分析巡检数据时,获取所述待分析巡检数据对应的巡检数据库和四足机器人的设备参数;
27、巡检信息比对模块,用于将所述待分析巡检数据和所述巡检数据库预设的标准巡检数据逐一匹配;
28、故障数据获取模块,用于若所述待分析巡检数据与各个所述标准巡检数据均不匹配,将所述待分析巡检数据中的巡检图像输入预先训练好的几何解析模型,生成所述巡检图像对应的障碍数据;
29、判断分析模块,用于判断所述障碍数据中的通过高度值是否大于预设的高度阈值;
30、通过性分析函数构建模块,用于若所述通过高度值大于所述高度阈值,则根据所述障碍数据和所述设备参数构建通过性分析函数,生成所述待分析巡检数据对应的通过性分析值;
31、巡检路径调整模块,用于根据所述通过性分析值与预设的通过阈值比较结果,调整所述四足机器人的巡检路径。
32、可选的,所述巡检信息比对模块,包括:
33、几何分析子模块,用于若所述待分析巡检数据与各个所述标准巡检数据均不匹配,则将所述待分析巡检数据中巡检图像输入预先训练好的几何解析模型,生成巡检图像对应的通过宽度值、通过高度值和相邻片段角度值;其中,所述几何解析模型是用于对输入的巡检图像进行分析输出对应的通过宽度值、通过高度值和相邻片段角度值;
34、故障数据获取子模块,用于采用所述通过宽度值、所述通过高度值和所述相邻片段角度值作为障碍数据。
35、可选的,所述通过性分析函数具体为:
36、
37、其中,t通过性分析值,l2宽度值,l1长度值,α相邻片段角度值,l通过宽度值,ε相邻片段角度补偿系数。
38、可选的,所述巡检路径调整模块,包括:
39、第二判断分析子模块,判断所述通过性分析值是否大于预设的通过阈值;
40、若所述通过性分析值大于所述通过阈值,则判定所述四足机器人可以通过;
41、若所述通过性分析值小于或等于所述通过阈值,则选取与当前巡检路径相邻的目标路径作为新的巡检路径;
42、跳转执行子模块,用于跳转执行所述当接收到当前时刻的待分析巡检数据时,获取所述待分析巡检数据对应的巡检数据库和四足机器人的设备参数的步骤。
43、可选的,还包括:
44、巡检路径规划模块,用于在预先建立的巡检地图上设置若干个采集点、以及所述采集点对应四足机器人的执行指令;
45、按照预设的巡检路径依次连接各个所述采集点,生成巡检路网;
46、选取所述巡检路网中各个所述采集点连接形成的最短路径作为目标路径;
47、控制所述四足机器人在所述目标路径上执行所述执行指令,并实时获取待分析巡检数据。
48、从以上技术方案可以看出,本发明具有以下优点:
49、本发明通过当接收到当前时刻的待分析巡检数据时,获取待分析巡检数据对应巡检数据库和四足机器人的设备参数,将待分析巡检数据和巡检数据库预设的标准巡检数据逐一匹配,若待分析巡检数据与各个标准巡检数据均不匹配,将待分析巡检数据中的巡检图像输入预先训练好的几何解析模型,生成巡检图像对应的障碍数据,判断障碍数据中的通过高度值是否大于预设的高度阈值,若通过高度值大于高度阈值,则根据待分析巡检数据和设备参数构建通过性分析函数,生成待分析巡检数据对应通过性分析值,根据通过性分析值与预设的通过阈值比较结果,调整四足机器人的巡检路径。解决了现有的四足机器人在巡检的过程中,因施工和检修的影响而导致获取的巡检信息并不完整,导致四足机器人获取巡检信息的准确性低的技术问题。本发明通过在四足机器人的巡检过程中实时获取图像信息和声音信息,并对图像信息和声音信息进行分析,使得四足机器人在巡检过程中能及时规避涉及施工和检修的路线,从而消除了施工和检修对巡检信息获取的影响,提高了四足机器人获取巡检信息的准确率。
- 还没有人留言评论。精彩留言会获得点赞!