考虑电机重载特性的六连杆包络成形装备滑模控制方法
本发明涉及成形装备,更具体地说,涉及一种考虑电机重载特性的六连杆包络成形装备滑模控制方法。
背景技术:
1、空间包络成形技术可以使得包络模具实现多自由度包络成形运动,使金属局部、连续成形,可以实现薄壁高筋构件的一次整体成形制造,且加工出来的薄壁高筋构件力学性能好、承载能力强,在制造过程中制造效率高、能耗低。并联机构因具有误差累积少、刚度高等优势,可以较好的作为空间包络成形技术的载体并实现包络模具的多自由度运动。然而,由于成形过程中六连杆包络成形装备会受到大且快速时变的成形外力,会导致六连杆包络成形装备包络模具运动控制精度降低,此外,六连杆包络成形装备永磁同步电机的电阻、电感、磁链等参数会发生较大变化,同样对包络模具的运动控制精度产生较大影响,采用传统三闭环pi控制方法时六连杆包络成形装备包络模具的运动轨迹会产生较大误差,进而影响薄壁高筋构件的成形精度。
技术实现思路
1、本发明要解决的技术问题在于,提供一种考虑电机重载特性的六连杆包络成形装备协同滑模控制方法,显著提升了六连杆包络成形装备的控制精度。
2、本发明解决其技术问题所采用的技术方案是:构造一种考虑电机重载特性的六连杆包络成形装备滑模控制方法,包括以下步骤:
3、s1、建立六连杆包络成形装备运动学模型;
4、s2、建立永磁同步电机在线参数辨识模型;
5、s3、建立六连杆包络成形装备机电耦合动力学模型;
6、s4、建立六连杆包络成形装备协同滑模控制模型。
7、按上述方案,所述六连杆包络成形装备包括机架、永磁同步电机、减速器、滚珠丝杠、驱动滑块、动平台、静平台、下平台、包络模具、下模具、球头连杆以及与连杆相连的球座组成,六连杆包络成形装备的驱动力来源于永磁同步电机,六个永磁同步电机和相应的六个驱动滑块通过减速器和滚珠丝杠连接,驱动滑块和球头连杆相连,使驱动力由永磁同步电机传向驱动滑块再传向连杆,球头连杆通过球座与动平台相连,且球座与动平台之间固定,使驱动力进一步传向动平台,动平台与包络模具之间固定,使包络模具实现复杂的包络成形运动。
8、按上述方案,所述步骤s1中建立六连杆包络成形装备运动学模型方法如下:
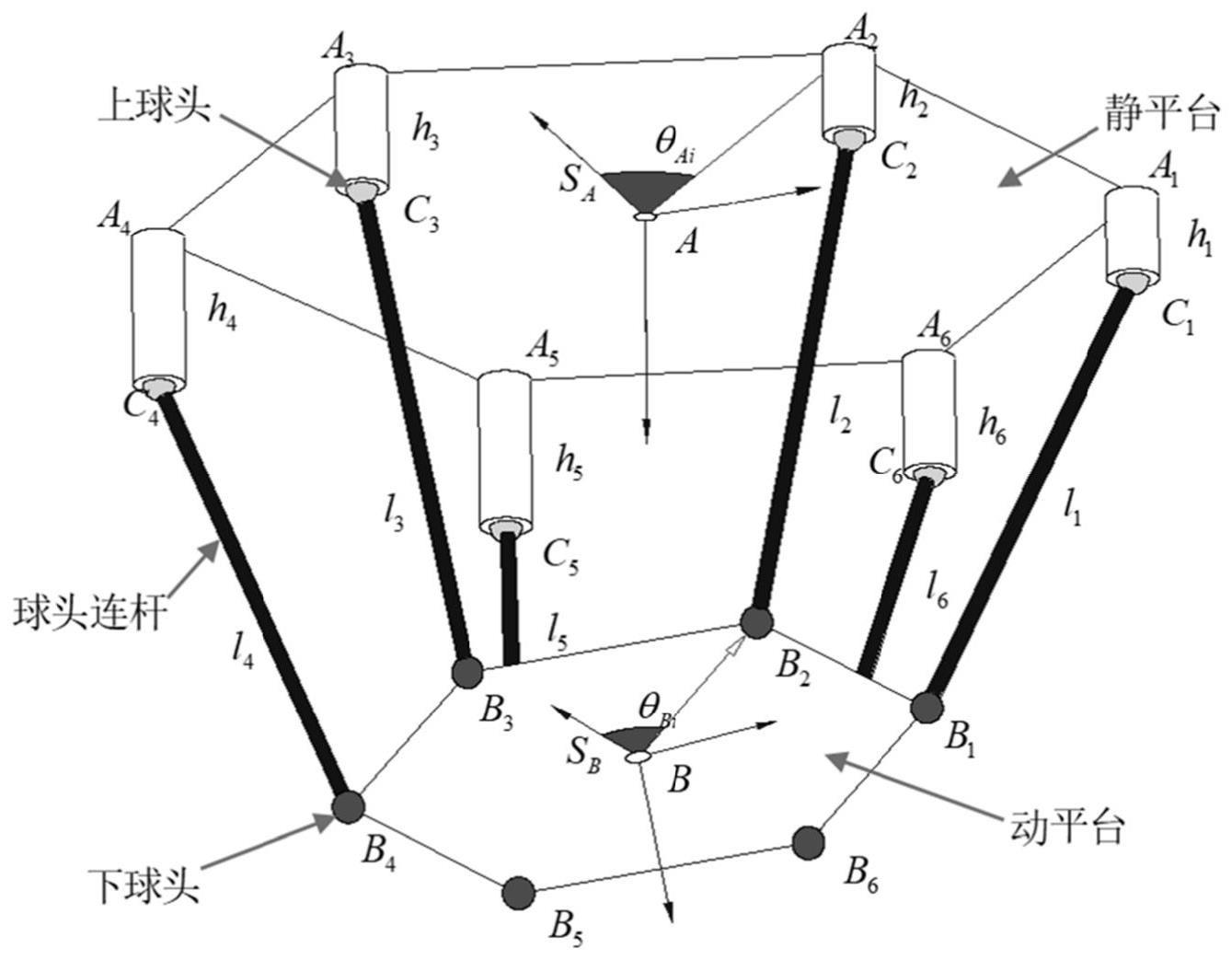
9、在静平台的中心a点建立静坐标系sa,并在装备工作时保持静止不动,动坐标系sb的原点位于动平台的平台中心b点,在六连杆包络成形装备运动时,动坐标系会随着动平台的运动而运动;a1-a6分别是六个驱动滑块的初始位置,b1-b6分别是六个球座的位置,c1-c6分别是在六个驱动滑块运动后的实际位置,h1-h6分别是六个驱动滑块的位移量,l1-l6分别是六个球头连杆的长度;ra是上球头中心外接圆半径,rb是下球头中心外接圆半径,θ1是上球头中心在静平台上的安装角度,θ2是下球头中心在动平台上的安装角度;
10、a1-a6在静坐标系sa中的位置矢量为a1-a6,由式(1)表示:
11、ai=[ra cosθai,rasinθai,hi,1]t(i=1…6) (1)
12、b1-b6在动坐标系sb中的位置矢量为b1-b6,由式(2)表示:
13、bi=[rbcosθbi,rbsinθbi,0,1]t (i=1…6) (2)
14、在包络成形运动过程中,包络模具中心点在坐标系sb中的空间位置由式(3)表示:
15、q=[α,β,γ,x,y,z]t (3)
16、式中,α、β、γ分别表示包络模具中心点绕坐标系sb中x、y、z坐标轴转动的角度值,x、y、z分别表示包络模具中心点沿坐标系sb中x、y、z坐标轴移动的位置值;
17、sb到sa的坐标变换矩阵t由式(4)表示:
18、
19、六连杆包络成形装备的矢量约束条件由式(5)表示:
20、|tbi-ai|=li (i=1…6) (5)
21、根据式(1)-(5),得到六个驱动滑块的位移量h1-h6。
22、按上述方案,所述步骤s2中建立永磁同步电机在线参数辨识模型方法如下:
23、在dq坐标系中,永磁同步电机电压方程由式(6)表示:
24、
25、式中,ud和uq分别是d轴电压和q轴电压,id和iq分别是d轴电流和q轴电流,l是电感,rs是定子电阻,ψmg是磁链,pn是极对数,ωn是电机的机械角速度;由于本发明中使用的是表贴式永磁同步电机,其q轴电感和d轴电感相等,因此式(6)中永磁同步电机的q轴电感和d轴电感统一用l表示;
26、将式(6)离散化得:
27、
28、式中,ts是采样时间;
29、基于递推最小二乘法的传统电机在线参数辨识方法表达式为:
30、
31、式中,θ(k)是待辨识的参数,是测量得到的输入,y(k)是测量得到的输出,p(k)是协方差矩阵,k(k)是自适应增益矩阵,λ是遗忘因子;
32、为了辨识电感l,式(7)整理为:
33、
34、由于永磁同步电机采用id=0的解耦策略,因此id约等于0,辨识算法刚启动时永磁同步电机电阻变化可忽略,可将电机铭牌的阻值带入算法,当算法稳定后,再将电阻值替换为辨识得到的阻值,因此rs可以看作为已知量;电感辨识算法的递推最小二乘形式为:
35、
36、为了辨识电阻rs和磁链ψmg,式(7)整理为:
37、
38、电阻和磁链辨识算法的递推最小二乘形式为:
39、
40、参数辨识方法表达式为:
41、
42、
43、式中,η是整定因子,k是增益系数。
44、按上述方案,所述步骤s3中建立六连杆包络成形装备机电耦合动力学模型的方法如下:
45、s301、建立六连杆包络成形装备动力学模型;
46、fai(i=1,2,…,6)是驱动滑块对球头连杆的约束力,fbi(i=1,2,…,6)是球头连杆对动平台的约束力,fli(i=1,2,…,6)是机架对驱动滑块的约束力,fw和mw分别是装备工作时动平台受到的成形力和成形力矩,m1g、m2g、m3g分别是动平台、球头连杆和驱动滑块受到的重力;
47、根据受力分析,动平台的力和力矩平衡方程由式(15)表示:
48、
49、式中,ap表示动平台在坐标系sa中的加速度矢量,di表示在坐标系sb中球座中心到动平台质心的方向矢量,ioa表示在坐标系sa中动平台的转动惯量矩阵,εoa表示在坐标系sa中动平台的角加速度,ωoa表示在坐标系sa中动平台的角速度;
50、球头连杆的力和力矩平衡方向由式(16)表示:
51、
52、式中,ali是球头连杆在坐标系sa中的加速度矢量,δli是球头连杆沿杆方向的单位矢量,l是球头连杆长度,ili是球头连杆在坐标系sa中的转动惯量矩阵,εli和ωli分别是球头连杆在坐标系sa中的角加速度和角速度;
53、驱动滑块的力平衡方向由式(17)表示:
54、fi+m3g-fai+fli=m3asi (17)
55、式中,asi是驱动滑块在坐标系sa中的加速度矢量;
56、在式(17)两端同时点乘驱动滑块的单位速度矢量esit得:
57、
58、驱动滑块驱动力的初步表达式由式(19)确定:
59、
60、将式(16)代入式(19)得:
61、
62、通过消除球头连杆力平衡方程和力矩平衡方程上的内力,进一步推导得:
63、lδli×fbi=li (21)
64、
65、在式(21)两边同时叉乘esi得:
66、lesi×δli×fbi=esi×li (23)
67、式(23)通过拉格朗日公式进一步变换表示为:
68、
69、对式(20)进行等式初等变换后表示为:
70、
71、联立式(24)和(25)得:
72、
73、联立式(15)-(26),六连杆包络成形装备的动力学方程由式(27)表示:
74、
75、式中,m(q)是惯量矩阵,是向心力和科氏力系数,g(q)是重力矩阵,f是装备所受成形外力,τ是驱动滑块的驱动力,j是雅可比矩阵;
76、s302、建立六连杆包络成形装备机电耦合动力学模型;
77、永磁同步电机的电压方程为:
78、
79、式中,id=diag(id1 … id6),iq=diag(iq1 … iq6),uq=diag(uq1 … uq6),ud=diag(ud1 … ud6),f1=diag(f11 … f16),f2=diag(f21 … f26),ωn=diag(ωn1 … ωn6),rs=diag(r*s1 … r*s6),l=diag(l*1 … l*6),ψmg=diag(ψ*mg1 … ψ*mg6),idi是第i个电机的d轴电流,iqi是第i个电机的q轴电流,udi是第i个电机的d轴电压,uqi是第i个电机的q轴电压,ωni是第i个电机的机械角速度;r*si、l*i和ψ*mgi分别是通过s3中提出的电机在线参数辨识算法得到的第i个电机的电阻、电感和磁链,f1i和f2i分别表示第i个电机由于参数辨识误差和模型不准确等因素引起的不确定量;
80、永磁同步电机的运动方程为:
81、
82、式中,te=diag(te1 … te6),b=diag(b1 … b6),tm=diag(tm1 … tm6),jm是电机的转动惯量,bi、tei和tmi分别是第i个电机的阻尼系数、转矩和负载力矩;
83、永磁同步电机的力矩表达式为:
84、
85、由于在六连杆包络成形装备中,永磁同步电机和驱动滑块通过滚珠丝杠连接,得到如下关系:
86、
87、式中,θi是第i个电机的转动角度,τi是第i个驱动滑块的驱动力,r是滚珠丝杠的减速比;
88、联立式(27)、(29)、(30)和(31),建立六连杆包络成形装备机电耦合动力学模型:
89、
90、式中,h=diag(h1 … h6);
91、按上述方案,所述步骤s4中建立六连杆包络成形装备协同滑模控制模型的方法如下:
92、s401、建立滑模控制模型
93、定义轨迹跟踪误差e1=h*-h,设计滑模面为将李雅普诺夫函数设计为将v1对时间进行微分并联立式(32)得:
94、
95、得到期望q轴电流iq*的表达式:
96、
97、式中,sgn(s1)=diag[sgn(s11) … sgn(s16)],k1、c1是正数,ρ1>|tmi|;
98、定义q轴电流跟踪误差e2=iq*-iq,设计滑模面为设计李雅普诺夫函数为将v2对时间进行微分得:
99、
100、得到q轴电压uq的表达式:
101、
102、式中,sgn(s2)=diag[sgn(s21) … sgn(s26)],k2、c2是正数,ρ2>|f2i|;
103、定义d轴电流跟踪误差e3=0-id,设计滑模面为设计李雅普诺夫函数为将v3对时间进行微分得:
104、
105、得到d轴电压ud的表达式:
106、ud=k3ls3+rsid-pnωnliq-c3lid+ρ3lsgn(s3) (38)
107、式中,sgn(s3)=diag[sgn(s31) … sgn(s36)],k3、c3是正数,ρ3>|f1i|;
108、s402、建立带负载观测器的滑模控制模型;
109、将式(32)改写为:
110、
111、式中,y=ωn,u=iq,c=[06×6 e6×6];
112、定义负载观测器空间状态方程为:
113、
114、式中,是待观测的参数,l=[ll1e6×6 ll2e6×6]t是负载观测器的增益矩阵;
115、将观测得到的代入式(27),得到当前装备所受成形外力的估计值:
116、
117、根据六连杆包络成形装备运动学模型,得到下一控制周期的电机负载:
118、
119、式中,j′和q′分别是下一控制周期的雅可比矩阵和包络模具中心点在坐标系sb中的空间位置;
120、将代入式(34)得新的期望q轴电流iq*的表达式:
121、
122、式中,
123、s403、滑模切换率的优化;
124、为了减少滑模控制方法引起的抖震,采用饱和函数sat()代替符号函数sgn(),饱和函数表达式为:
125、
126、式中,δ是边界层的厚度;
127、将式(44)代入式(43)、(36)和(38),得到最终的控制率:
128、
129、式中,sat(s1)=diag[sat(s11) … sat(s16)],sat(s2)=diag[sat(s21) … sat(s26)],sat(s3)=diag[sat(s31) … sat(s36)]。
130、实施本发明的考虑电机重载特性的六连杆包络成形装备滑模控制方法,具有以下有益效果:
131、1、本发明利用空间坐标变换和矢量约束条件提出的六连杆包络成形装备运动学模型,能够根据包络模具位姿得到驱动滑块的期望轨迹。
132、2、本发明基于六连杆包络成形装备运动学特性提出的带整定因子的永磁同步电机在线参数辨识方法,能够有效提高快速时变负载下的电机在线参数辨识精度。
133、3、本发明基于六连杆包络成形装备动力学模型和永磁同步电机数学模型提出的六连杆包络成形装备机电耦合动力学模型,能够根据动平台位姿、动平台所受外力得到永磁同步电机负载。
134、4、本发明提出的考虑电机重载特性的重载六连杆包络成形装备滑模控制方法,能够准确估计六连杆包络成形装备所受成形外力,有效提升六连杆包络成形装备的控制精度和抗干扰能力。
- 还没有人留言评论。精彩留言会获得点赞!