一种智能网联车辆轨迹规划方法、装置、设备及介质
本发明涉及计算机处理,尤其涉及一种智能网联车辆轨迹规划方法、装置、设备及介质。
背景技术:
1、随着城市化进程的深入,城市车辆激增带来的交通事故和交通拥堵进一步加剧。自动驾驶在减少交通事故和缓解交通拥堵等方面展现出巨大的潜力,已成为研究热点。
2、在自动驾驶的过程中,通常需要基于车辆四周的交通信息对车辆进行轨迹规划。目前的轨迹规划方式通常是针对单车进行避障式的轨迹规划,通过躲避障碍物的方式为车辆规划行驶轨迹,不仅无法准确的对车辆在交叉口前的行驶轨迹进行规划,也存在规划轨迹安全性低的问题。
技术实现思路
1、本发明提供了一种车辆轨迹规划方法、装置、设备及介质,以实现提高规划轨迹的准确性和平滑性,达到提高车辆行驶效率和安全性的技术效果。
2、根据本发明的一方面,提供了一种车辆轨迹规划方法,该方法应用于智能网联,该方法包括:
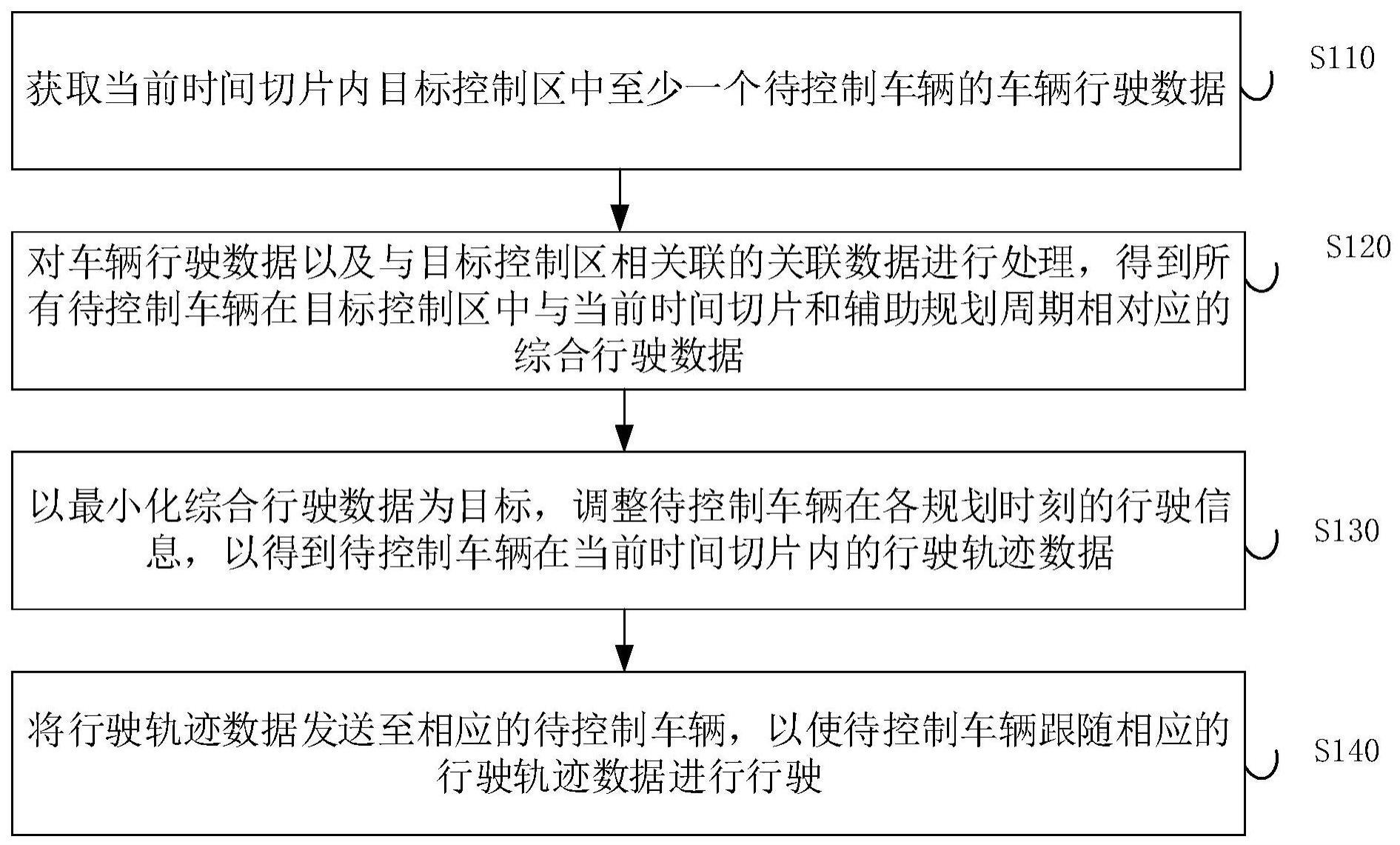
3、获取当前时间切片内目标控制区中至少一个待控制车辆的车辆行驶数据;其中,所述车辆行驶数据中包括初始位置、初始车速、初始车道和/或目标行驶车道;
4、对所述车辆行驶数据以及与所述目标控制区相关联的关联数据进行处理,得到所有待控制车辆在所述目标控制区中与所述当前时间切片和辅助规划周期相对应的综合行驶数据;其中,所述关联数据包括交通信号数据、交叉口的位置信息和禁止换道区的位置信息;所述辅助规划周期的起始时刻晚于所述当前时间切片的起始时刻;所述综合行驶数据包括行驶时长数据、加速度数据和换道频次数据;
5、以最小化所述综合行驶数据为目标,调整所述待控制车辆在各规划时刻的行驶信息,以得到所述待控制车辆在所述当前时间切片内的行驶轨迹数据;
6、将所述行驶轨迹数据发送至相应的待控制车辆,以使所述待控制车辆跟随相应的行驶轨迹数据进行行驶。
7、根据本发明的另一方面,提供了一种车辆轨迹规划装置,该装置配置于智能网联,该装置包括:
8、数据获取模块,用于获取当前时间切片内目标控制区中至少一个待控制车辆的车辆行驶数据;其中,所述车辆行驶数据中包括初始位置、初始车速、初始车道和/或目标行驶车道;
9、行驶数据确定模块,用于对所述车辆行驶数据以及与所述目标控制区相关联的关联数据进行处理,得到所有待控制车辆在所述目标控制区中与所述当前时间切片和辅助规划周期相对应的综合行驶数据;其中,所述关联数据包括交通信号数据、交叉口的位置信息和禁止换道区的位置信息;所述辅助规划周期的起始时刻晚于所述当前时间切片的起始时刻;所述综合行驶数据包括行驶时长数据、加速度数据和换道频次数据;
10、行驶轨迹确定模块,用于以最小化所述综合行驶数据为目标,调整所述待控制车辆在各规划时刻的行驶信息,以得到所述待控制车辆在所述当前时间切片内的行驶轨迹数据;
11、轨迹发送模块,用于将所述行驶轨迹数据发送至相应的待控制车辆,以使所述待控制车辆跟随相应的行驶轨迹数据进行行驶。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的车辆轨迹规划方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的车辆轨迹规划方法。
17、本发明实施例的技术方案,通过获取当前时间切片内目标控制区中至少一个待控制车辆的车辆行驶数据;对车辆行驶数据以及与目标控制区相关联的关联数据进行处理,得到所有待控制车辆在目标控制区中与当前时间切片和辅助规划周期相对应的综合行驶数据;以最小化综合行驶数据为目标,调整待控制车辆在各规划时刻的行驶信息,以得到待控制车辆在当前时间切片内的行驶轨迹数据,以使待控制车辆跟随相应的行驶轨迹数据进行行驶,解决了现有技术中使用躲避障碍物的方式进行轨迹规划,导致规划轨迹准确性低和安全性差的问题,实现了通过设置目标控制区,考虑目标控制区内所有车辆的车辆行驶数据,以及与目标控制区相关联的关联数据,确定待控制车辆的行驶时长数据、加速度数据和换道频次数据等综合行驶数据,不仅综合考虑了各待控制车辆的行驶信息,使得各待控制车辆的行驶数据相同协调,提高行驶数据确定的准确性,进而提高行驶安全性,还结合辅助规划周期的行驶数据对当前时间切片内的行驶轨迹进行规划,提高轨迹规划准确性。进一步的,通过最小化综合行驶数据,使得调整后的待控制车辆在各规划时刻的行驶信息是安全的、平滑的,达到提高车辆行驶效率和安全性的技术效果。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种车辆轨迹规划方法,其特征在于,应用于智能网联,包括:
2.根据权利要求1所述的方法,其特征在于,所述对所述车辆行驶数据以及与所述目标控制区相关联的关联数据进行处理,得到所有待控制车辆在所述目标控制区中与所述当前时间切片和辅助规划周期相对应的综合行驶数据,包括:
3.根据权利要求2所述的方法,其特征在于,所述将所述车辆行驶数据和所述关联数据输入至所述轨迹规划模型中,得到行驶时长数据、加速度数据和换道频次数据,包括:
4.根据权利要求1所述的方法,其特征在于,所述以最小化所述综合行驶数据为目标,调整所述待控制车辆在各规划时刻的行驶信息,以得到所述待控制车辆在所述当前时间切片内的行驶轨迹数据,包括:
5.根据权利要求4所述的方法,其特征在于,所述约束条件包括加速度、速度和位置的关系约束、速度和加速度的范围约束、行驶行为约束、车间距离约束、换道约束、禁止换道区约束、变量一致性约束、初始参数约束、变量定义约束、规划周期约束和交叉口通行约束。
6.根据权利要求5所述的方法,其特征在于,所述交叉口通行约束包括通行速度约束、通行车道约束、信号灯约束和周期边界约束。
7.一种车辆轨迹规划装置,其特征在于,配置于智能网联,包括:
8.根据权利要求7所述的装置,其特征在于,所述行驶数据确定模块,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-6中任一项所述的车辆轨迹规划方法。
技术总结
本发明公开了一种智能网联车辆轨迹规划方法、装置、设备及介质。该方法包括:获取当前时间切片内目标控制区中至少一个待控制车辆的车辆行驶数据;对车辆行驶数据以及与目标控制区相关联的关联数据进行处理,得到所有待控制车辆在目标控制区中与当前时间切片和辅助规划周期相对应的综合行驶数据;以最小化综合行驶数据为目标,调整待控制车辆在各规划时刻的行驶信息,以得到待控制车辆在当前时间切片内的行驶轨迹数据,以使待控制车辆跟随相应的行驶轨迹数据进行行驶。解决了现有技术中使用躲避障碍物的方式进行轨迹规划,导致规划轨迹准确性低和安全性差的问题,实现提高规划轨迹的准确性和平滑性,达到提高车辆行驶效率和安全性的效果。
技术研发人员:李萌,郭娅明,柳清泉,李深,张珂
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!