四旋翼无人机固定时间保性能容错跟踪控制器设计方法
本发明涉及六自由度四旋翼无人机,具体而言,涉及一种四旋翼无人机固定时间保性能容错跟踪控制器设计方法。
背景技术:
1、四旋翼无人机是一种可以垂直起降,通过四个旋翼产生升力的多旋翼飞行器。由于它可以悬停在空中、飞行稳定,操作灵活,成本较低等优点,所以在近年来越来越受到人们的关注和使用。随着最初的无人机技术的发展,多旋翼无人机变得越来越小巧、灵活,成本也越来越低,普及性越来越广泛。如今,四旋翼无人机已经广泛应用于军事侦察、空气摄影、环境检测、建筑物检查、应急救援等不同领域,成为了人们日常生活不可或缺的服务。在这些具体的应用领域中,四旋翼无人机需要根据任务需求飞行到指定的路径和位置,这就需要设计轨迹跟踪控制算法对四旋翼无人机进行控制。轨迹跟踪控制是一种控制算法,主要是将四旋翼无人机的实际运动与期望的运动进行比较,不断优化控制量,使得四旋翼无人机能够按照预定轨迹精确地飞行。因此,研究轨迹跟踪控制算法是实现四旋翼无人机精确控制、完成复杂任务的必要手段,也是四旋翼无人机技术的重要方向之一,而自适应指令滤波反推技术是一种有效的控制算法,可以提高控制的精度和稳定性,适用于需要高精度控制的航空、机器人等领域。基于此,有必要设计快速且高精度的轨迹跟踪控制器。另外,现有大多控制器设计方法中,往往忽略了轨迹跟踪误差在收敛过程中需要同时满足暂态性能和稳态性能的要求,一些核心指标包括收敛时间、最大超调量以及稳态精度无法同时得到保证。因此,如何提高跟踪误差的暂态性能和稳态性能是一项具有重要意义的工作。
2、此外,四旋翼无人机在执行任务时要对外界信息进行即时的传输计算,且多数四旋翼无人机控制器是基于时间触发控制策略的,此种方法的劣势是系统控制信号持续的更新,无疑会导致系统通信资源的浪费,如果频繁的发送操作或使用超出执行器能力范围的控制信号会使执行器过热甚至损坏。因此,如何降低控制信号的更新频率、减少数据传输问题以及在执行器故障的情况下依旧精准跟踪预定轨迹十分重要。
技术实现思路
1、为了解决上述技术问题,本发明针对六自由度四旋翼无人机系统提供了一种改进的四旋翼无人机固定时间保性能容错跟踪控制器设计方法。
2、本发明采取的技术方案如下:
3、一种四旋翼无人机固定时间保性能容错跟踪控制器设计方法,包括以下步骤:
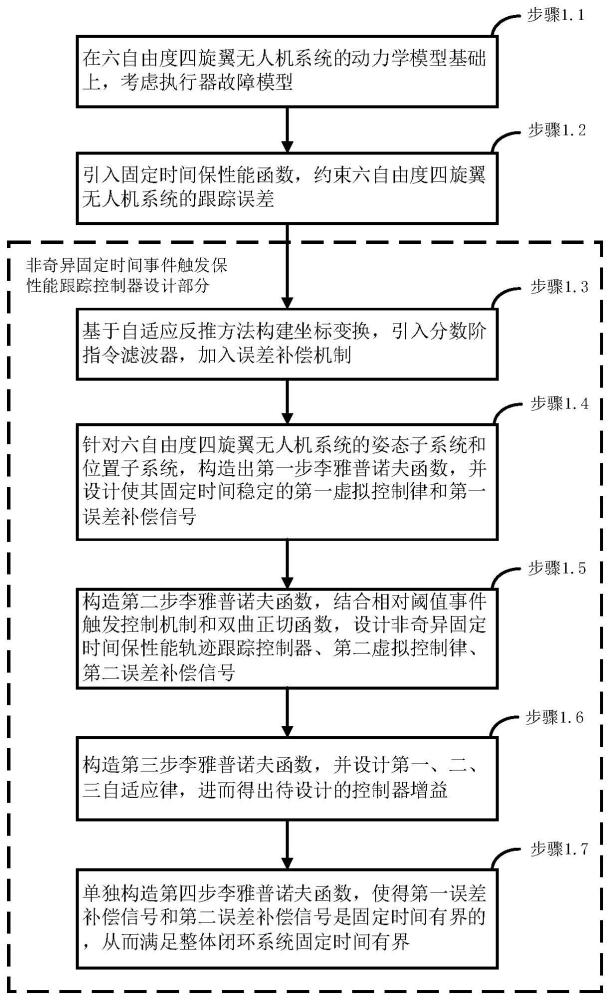
4、s1、建立六自由度四旋翼无人机系统的动力学模型,考虑执行器故障情况,将六自由度四旋翼无人机系统的动力学模型概括为一般表达式;
5、s2、引入固定时间保性能函数,约束基于一般表达式,六自由度四旋翼无人机系统产生的跟踪误差ei,1(t),利用误差转换函数和等式关系将受不等式约束的跟踪误差ei,1(t)转换为不受约束的等效误差hi(t);
6、s3、根据等效误差hi(t),基于自适应指令滤波反推控制法构建坐标变换方程,引入分数阶指令滤波器,加入误差补偿机制;
7、s4、基于坐标变换方程,针对六自由度四旋翼无人机系统的姿态子系统和位置子系统,构造第一步李雅普诺夫函数v1,设计使六自由度四旋翼无人机系统的姿态子系统和位置子系统的固定时间稳定的第一虚拟控制律αi,1和第一误差补偿信号通过第一步李雅普诺夫函数v1的时间导数确认设计的第一虚拟控制律αi,1和第一误差补偿信号是否使六自由度四旋翼无人机系统的姿态子系统和位置子系统的固定时间稳定;
8、s5、基于第一步李雅普诺夫函数v1构造第二步李雅普诺夫函数v2,结合相对阈值事件触发控制机制和双曲正切函数,设计使六自由度四旋翼无人机系统的姿态子系统和位置子系统的固定时间稳定的非奇异固定时间跟踪控制器第二虚拟控制律αi,2和第二误差补偿信号通过第二步李雅普诺夫函数v2的时间导数确认设计的非奇异固定时间跟踪控制器第二虚拟控制律αi,2和第二误差补偿信号是否使六自由度四旋翼无人机系统的姿态子系统和位置子系统的固定时间稳定;
9、s6、基于第二步李雅普诺夫函数v2构造第三步李雅普诺夫函数v3,设计满足固定时间有界的第一、二、三自适应律通过第二步李雅普诺夫函数v3的时间导数确认设计的第一、二、三自适应律是否满足固定时间有界;
10、s7、基于第一误差补偿信号和第二误差补偿信号构造第四步李雅普诺夫函数v4,确保整体闭环系统的固定时间稳定,实现六自由度四旋翼无人机系统对参考轨迹的快速跟踪。
11、在本发明的一较佳实施方式中,步骤s1中,六自由度四旋翼无人机系统的动力学模型为:
12、
13、式中:x,y,z表示三个空间位置;φ,θ和ψ表示四旋翼无人机的三个飞行姿态角,分别是翻滚角、俯仰角和偏航角;表示*的二阶时间导数,表示*的一阶时间导数;a为从四旋翼无人机的质点到旋桨中心的长度;m为四旋翼无人机的总质量;g为重力加速度;jx、jy和jz分别表示三个坐标轴的旋转惯量;ci表示阻尼系数,di表示外部未知扰动,其中i=φ,θ,ψ,z,x,y;τf表示总升力;τφ、τθ和τψ分别表示控制翻滚、俯仰和偏航力矩的输入信号;
14、六自由度四旋翼无人机的故障模型表示为:
15、
16、其中,ρi∈(0,1]表示执行器的执行效率系数,πi为未知时变偏差故障;将六自由度四旋翼无人机系统的动力学模型概括为一般表达式:
17、
18、式中:(ε1,ε2,ε3,ε4,ε5,ε6)=(φ,θ,ψ,z,x,y),τf(cosφsinψsinθ-cosψsinφ)),(d1,d2,d3,d4,d5,d6)=(dφ,dθ,dψ,dz,dx,dy),总升力τf和参考轨迹通过和ε3得到:
19、
20、在本发明的一较佳实施方式中,步骤s2中,固定时间保性能函数为:
21、
22、式中:vi0和分别为固定时间性能函数的初始值和稳态值,均为正数;tf为待设计的收敛时间;跟踪误差ei,1(t)的约束条件是-vi(t)≤ei,1(t)≤vi(t)。
23、在本发明的一较佳实施方式中,步骤s3中,坐标变换方程为:
24、
25、式中:ζi,1、ζi,2是补偿后的跟踪误差信号;zi,1、zi,2是误差补偿信号;是将第一虚拟控制律αi,1作为输入的分数阶指令滤波器的输出信号,分数阶指令滤波器为:
26、
27、式中:ds表示分数运算符,0<s<1;βi>0是设计常数。
28、在本发明的一较佳实施方式中,步骤s4中,第一步李雅普诺夫函数
29、
30、第一虚拟控制律αi,1和第一误差补偿信号满足以下公式:
31、
32、
33、
34、式中:δi,1,pi,1,qi,1,ti,1,δi,1,mi,1和ni,1(i=1,2,…,6)为待设计的正控制器增益,pi,1>mi,1,(为滤波器误差);是γi,1的估计值,估计误差为
35、在本发明的一较佳实施方式中,步骤s5中,第二步李雅普诺夫函数
36、
37、第二虚拟控制律αi,2和第二误差补偿信号满足以下公式:
38、
39、
40、式中:pi,2,qi,2,ti,2,δi,2,mi,2,ni,2(i=1,2,…,6)为待设计的正控制器增益,是γi,2的估计值,估计误差为为复合扰动mi的估计值,其中为估计误差;
41、非奇异固定时间跟踪控制器为:
42、
43、式中:γi(t)为中间控制律,、0<μi<1,φi,1(t)、φi,2(t)都是连续时变函数,且满足|φi,1(t)|≤1和|φi,2(t)|≤1。
44、在本发明的一较佳实施方式中,步骤s6中,第三步李雅普诺夫函数
45、
46、式中:ci,1、ci,2和ci,3是正常数;
47、第一、二、三自适应律满足以下公式:
48、
49、
50、
51、式中:ii,j、li,j(i=1,2,…,6;j=1,2)都是正常数。
52、在本发明的一较佳实施方式中,步骤s6中,第四步李雅普诺夫函数
53、
54、与现有技术相比,本发明的有益效果是:
55、1)所设计的固定时间事件触发保性能容错跟踪控制器,在六自由度四旋翼无人机系统的初始位置条件未知的情况下,系统的输出轨迹能够在固定时间内跟踪参考轨迹,保证六自由度四旋翼无人机闭环系统的所有信号是固定时间有界的,同时系统的稳定时间上界可以估算,并独立于系统的初始位置条件;
56、2)不同于传统的指数型保性能函数只有当时间趋于无穷时,跟踪误差才能收敛至预设的性能区间,本发明引入固定时间保性能函数,保证在待设定的任意时间内,跟踪误差可以收敛至性能函数的包络线,满足保的跟踪性能需求,并且有效改善系统的暂态性能和稳态性能,且固定时间保性能函数的参数可以任意设计,可满足不同情况下的性能需求。
57、3)结合事件触发控制机制,设计固定时间相对阈值事件触发保性能轨迹跟踪控制器,有效的避免了系统控制信号的持续更新,避免了芝诺效应,降低了控制信号的更新频率和执行器的磨损。
58、4)将分数阶指令滤波器与误差补偿机制结合,不仅避免了“复杂度爆炸”的问题,而且提高了滤波器的性能,从而获得更好的跟踪效果,并且分数阶还为控制器设计增加了一定的自由度。
59、5)引入双曲正切函数,避免了区间二型模糊不能逼近无穷项带来的潜在奇异性,提高了控制器的稳定性。
60、6)对于外部干扰和偏差故障,采用自适应补偿技术,使其不需要先验知识,可以是未知的。
61、为使本发明的上述目的、特征和优点能更明显易懂,下文特举本发明实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!