一种基于变结构自抗扰控制器的欠驱动控制系统及方法
本发明涉及欠驱动控制,具体涉及一种基于变结构自抗扰控制器的欠驱动控制系统及方法。
背景技术:
1、欠驱动倒立摆具有复杂性、不稳定和非线性等特点,适合于在实际工程中应用。欠驱动倒立摆是一个火热的研究热点,对欠驱动倒立摆系统的研究,可以很好地体现出其在实际应用中所遇到的一些具有代表性的问题,例如非线性、鲁棒性、镇定、跟随和追踪等。以欠驱动倒立摆作为控制对象,也是如今控制领域用来检测先进控制算法是否具有较高的稳定性以及处理非线性问题的能力。欠驱动倒立摆系统在工业领域中应用也很广泛,例如航天领域、军工领域、机器人技术、火箭回收及发射、卫星的姿态控制等。
2、目前,欠驱动控制系统在电机受到突发的扰动时,现有的控制方法普遍不能使电机的速度及时地恢复,导致欠驱动控制系统的抗干扰性能较差,容易造成倒立摆系统稳定性较差或者无法保持平稳;因此,需要构建一种基于变结构自抗扰控制器的欠驱动控制系统及方法。
技术实现思路
1、本发明的目的是克服现有技术的不足,为更好的有效解决目前欠驱动控制系统在电机受到突发的扰动时,现有的控制方法由于普遍不能使电机的速度及时地恢复,从而导致欠驱动控制系统的抗干扰性能较差,容易造成倒立摆系统稳定性较差或者无法保持平稳的问题,提供了一种基于变结构自抗扰控制器的欠驱动控制系统及方法,其实现了在欠驱动控制系统的电机受到突发扰动时具有较强的抗干扰能力,且电机的速度能及时地恢复,结合构建的线性跟踪微分器、扩张状态观测器和扩张状态观测器能很好的削弱系统抖振,提高了系统的响应速度和抗干扰性能。
2、为了达到上述目的,本发明所采用的技术方案是:
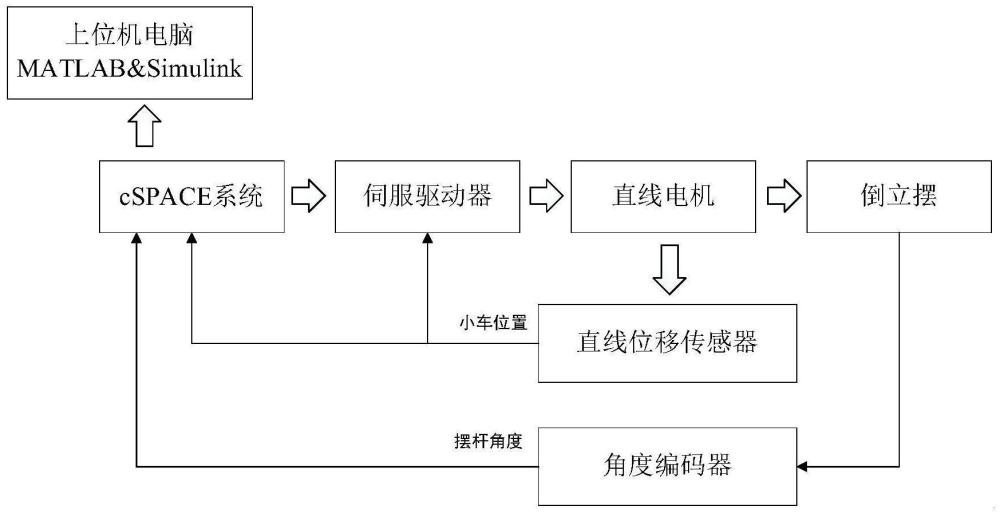
3、一种基于变结构自抗扰控制器的欠驱动控制系统,包括欠驱动倒立摆平台、上位机、变结构自抗扰控制器、光电编码器、数字信号处理器、伺服驱动器和直流驱动电机,所述欠驱动倒立摆平台用于控制自不稳定的摆杆;
4、所述上位机用于实时对倒立摆平台的摆杆和滑块位移数据进行记录,并实时传输倒立摆平台所需数据;
5、所述变结构自抗扰控制器用于对欠驱动倒立摆平台的稳定性进行控制;
6、所述光电编码器用于对摆杆角进行探测,并获得摆杆角信息;
7、所述数字信号处理器用于将摆杆角信息与光栅所输出的位置信息相结合并获得控制量,再将控制信号输出;
8、所述伺服驱动器用于将数字信号处理器输出的控制信号进行放大,并带动线性马达产生对应作用力从而对摆杆进行反向均衡;
9、所述直流驱动电机用于接收伺服驱动器放大后的控制信号,并向伺服驱动器回送转速。
10、前述的一种基于变结构自抗扰控制器的欠驱动控制系统,所述变结构自抗扰控制器包含线性跟踪微分器、误差反馈控制器和扩张状态观测器。
11、一种基于变结构自抗扰控制器的欠驱动控制方法,包括以下步骤,
12、步骤(a),构建基于变结构自抗扰控制器的欠驱动控制系统;
13、步骤(b),根据构建好的欠驱动控制系统,建立倒立摆运动方程;
14、步骤(c),基于倒立摆运动方程,构建变结构自抗扰控制器,其中变结构自抗扰控制器包含线性跟踪微分器、误差反馈控制器和扩张状态观测器;
15、步骤(d),利用线性跟踪微分器获取小车的实际位移及速度和参考位移及速度,并合成控制量;
16、步骤(e),采用扩张状态观测器对欠驱动控制系统的输出角度及角速度进行实时测算;
17、步骤(f),采用误差反馈控制器对测算误差进行实时反馈,完成对欠驱动控制系统的控制作业。
18、前述的一种基于变结构自抗扰控制器的欠驱动控制方法,步骤(a),构建基于变结构自抗扰控制器的欠驱动控制系统,其中所述欠驱动控制系统包括欠驱动倒立摆平台、上位机、变结构自抗扰控制器、光电编码器、数字信号处理器、伺服驱动器和直流驱动电机。
19、前述的一种基于变结构自抗扰控制器的欠驱动控制方法,步骤(b),根据构建好的欠驱动控制系统,建立倒立摆运动方程,具体步骤如下,
20、步骤(b1),在水平方向应用牛顿第二定律,如公式(1)所示,
21、
22、其中,m表示小车的质量,m表示摆杆的质量,l表示摆杆的长度,x表示小车的位移,θ表示摆杆的角度,u表示输出;
23、步骤(b2),在垂直于摆杆的方向应用牛顿第二定律,如公式(2)所示,
24、
25、其中,g表示重力加速度;
26、步骤(b3),求微分方程并线性化,获得倒立摆运动方程如公式(3)所示,
27、
28、前述的一种基于变结构自抗扰控制器的欠驱动控制方法,步骤(c),基于倒立摆运动方程,构建变结构自抗扰控制器,其中变结构自抗扰控制器包含线性跟踪微分器、误差反馈控制器和扩张状态观测器,所述线性跟踪微分器用于获取小车的实际位移及速度和参考位移及速度并合成控制量,所述扩张状态观测器用于对欠驱动控制系统的输出角度及角速度进行实时测算,所述误差反馈控制器用于对测算误差进行实时反馈。
29、前述的一种基于变结构自抗扰控制器的欠驱动控制方法,步骤(d),利用线性跟踪微分器获取小车的实际位移及速度和参考位移及速度,并合成控制量,其中线性跟踪微分器如公式(4)所示,
30、
31、其中,m0表示小车的实际位移,m1表示小车位移的跟踪值,m2表示小车速度的测算值,h1表示可调参数;为了得到小车参考位移的跟踪值v1和微分值v2,再使用一个线性跟踪微分器,且该线性跟踪微分器的可调参数为h2。
32、前述的一种基于变结构自抗扰控制器的欠驱动控制方法,步骤(e),采用扩张状态观测器对欠驱动控制系统的输出角度及角速度进行实时测算,其中扩张状态观测器如公式(5)所示,
33、
34、其中,e表示观测误差,b0表示补偿因子,u表示控制输出,zal(·)为非线性函数,β01、β02和β03表示扩张状态观测器的增益,σ1和σ2表示非线性因子,α1、α2、δ1、δ2、γ1和γ2均为可调参数;
35、非线性函数zal(·)的表达式如公式(6)所示,
36、
37、其中,δ和γ表示控制器可调参数,α表示zal函数的线性区间宽度。
38、前述的一种基于变结构自抗扰控制器的欠驱动控制方法,步骤(f),采用误差反馈控制器对测算误差进行实时反馈,完成对欠驱动控制系统的控制作业,其中误差反馈控制器如公式(7)所示,
39、
40、其中,n1、n2、n3和n4表示误差反馈控制器的增益。
41、本发明的有益效果是:本发明的一种基于变结构自抗扰控制器的欠驱动控制系统及方法,首先构建了一种新型的zal函数,解决了传统函数由于拐点处不平滑容易引起的抖振以及大误差使得系统增益变大的问题,接着为了得到欠驱动倒立摆系统的两个输出,构建了两个线性跟踪微分器得到实际位移和速度以及参考位移和速度,随后基于新型非线性zal函数构建出扩张状态观测器,对欠驱动系统的输出角度及角速度进行实时测算,并且控制率部分将两个输出量组合成控制量,从而实现对两个输出量的良好控制,最后构建欠驱动倒立摆系统的控制实施例,并将该控制方法的输出响应曲线同传统自抗扰控制进行了对比分析,结果验证了所构建的变结构自抗扰控制方法的优越性和可行性,提高了欠驱动倒立摆系统的稳定性和抗干扰性;综上所述,有效的实现了本发明在欠驱动控制系统的电机受到突发扰动时具有较强的抗干扰能力,且电机的速度能及时地恢复,结合构建的线性跟踪微分器、扩张状态观测器和扩张状态观测器能很好的削弱系统抖振,提高了系统的响应速度和抗干扰性能。
- 还没有人留言评论。精彩留言会获得点赞!